 返回首页
返回首页
 回到顶部
回到顶部
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来—小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
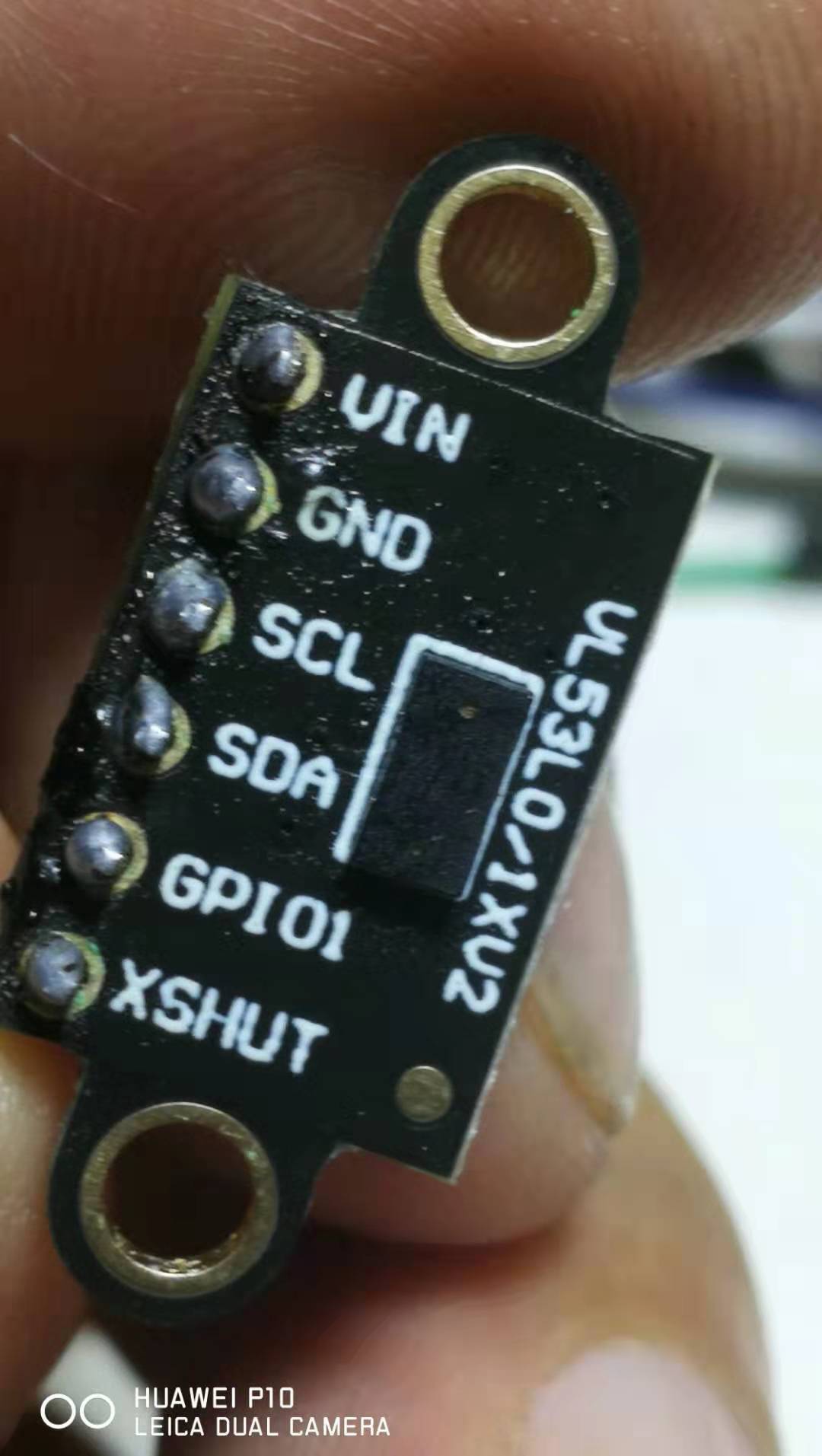
实验一百五十八:GY-530 VL53L0X 激光测距 ToF测距 飞行时间测距传感器模块 IIC通信协议
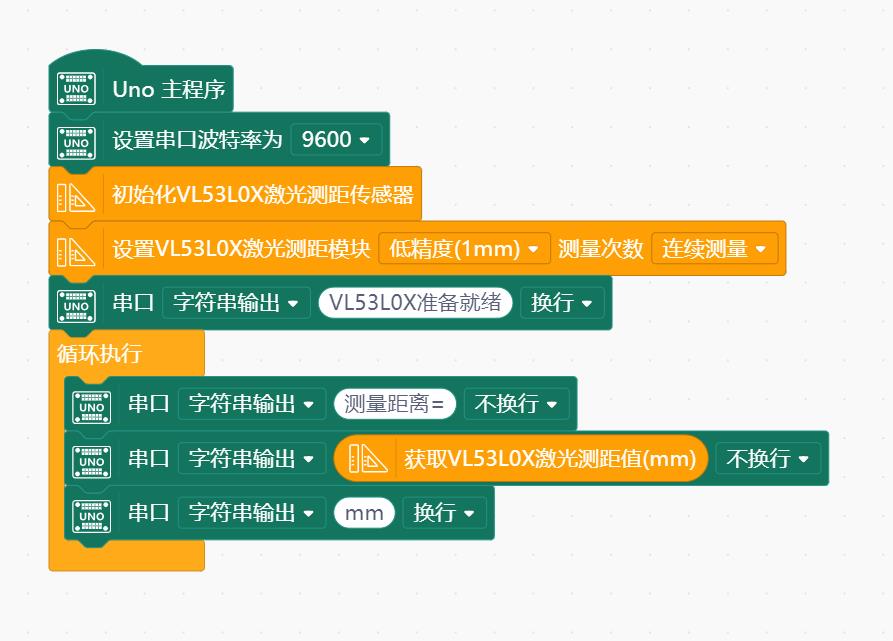
实验开源图形编程(Mind+、编玩边学)
项目之三:简易测距(串口显示动态数据)
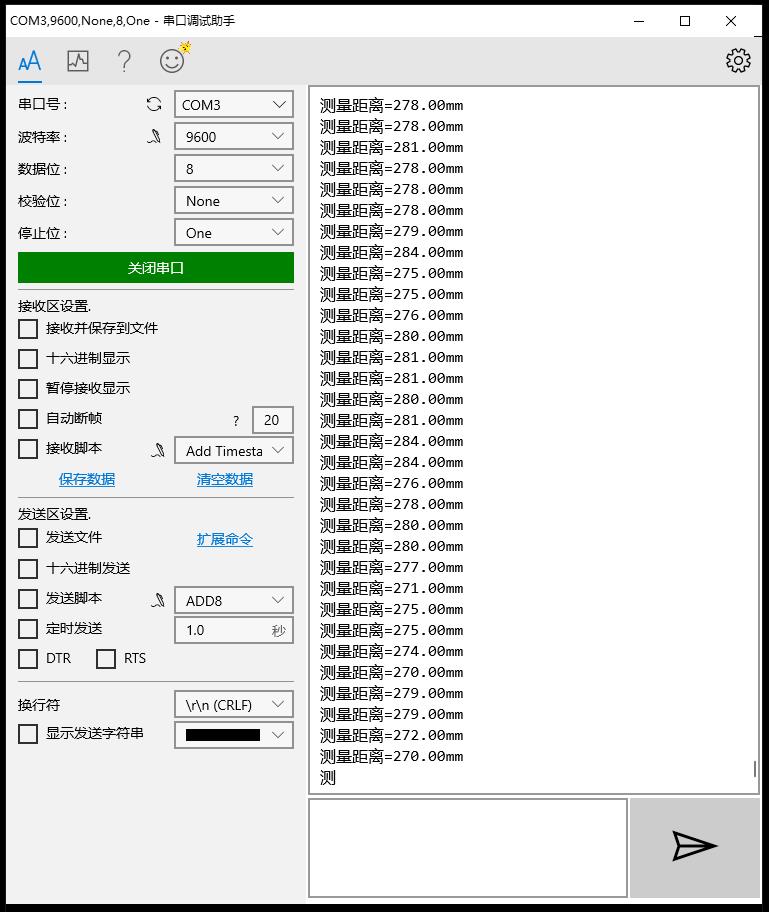
实验串口返回情况
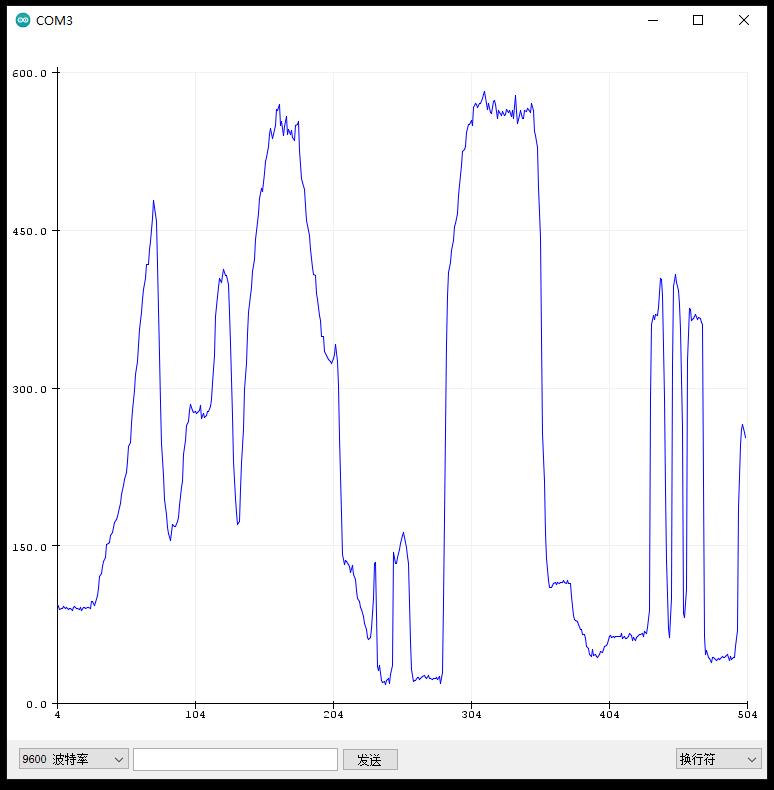
实验串口绘图器返回情况
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十八:GY-530 VL53L0X 激光测距 ToF测距 飞行时间测距传感器模块 IIC通信协议
项目之四:简易测量距离(读数以毫米为单位,可测范围40mm-2200mm)
模块接线:
VL53L0X Arduino
VCC 5V
GND GND
SCL A5
SDA A4
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十八:GY-530 VL53L0X 激光测距 ToF测距 飞行时间测距传感器模块 IIC通信协议
项目之四:简易测量距离(读数以毫米为单位,可测范围40mm-2200mm)
模块接线:
VL53L0X Arduino
VCC 5V
GND GND
SCL A5
SDA A4
*/
#include <VL53L0X.h>
#include <Wire.h>
VL53L0X sensor; //Create the sensor object
int startTime = millis(); //used for our timing loop
int mInterval = 100; //refresh rate of 10hz
void setup() {
Serial.begin(57600);
Wire.begin(); //Setup your I2C interface
Wire.setClock(400000); // use 400 kHz I2C
sensor.setTimeout(500); //Set the sensors timeout
if (!sensor.init())//try to initilise the sensor
{
//Sensor does not respond within the timeout time
Serial.println("VL53L0X is not responding, check your wiring");
}
else
{
//SET THE SENSOR TO LONG RANGE MODE
// lower the return signal rate limit (default is 0.25 MCPS)
sensor.setSignalRateLimit(0.1);
// increase laser pulse periods (defaults are 14 and 10 PCLKs)
sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodPreRange, 18);
sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodFinalRange, 14);
sensor.setMeasurementTimingBudget(40000); //Set its timing budget in microseconds longer timing budgets will give more accurate measurements
sensor.startContinuous(50); //Sets the interval where a measurement can be requested in milliseconds
}
}
void loop() {
//We have to be careful here. If we request a measurement before the measurement has been taken your
//code will be blocked until the measurement is complete. In order to stop this from happening we
//must ensure that time between measurement requests is greater than the timing budget and the argument
//given in the startContinuous() function. In our case our measurement time must be greater than 50mS.
if ((millis() - startTime) > mInterval)
{
Serial.println(sensor.readRangeContinuousMillimeters()); //Get a reading in millimeters
startTime = millis();
}
delay(80);
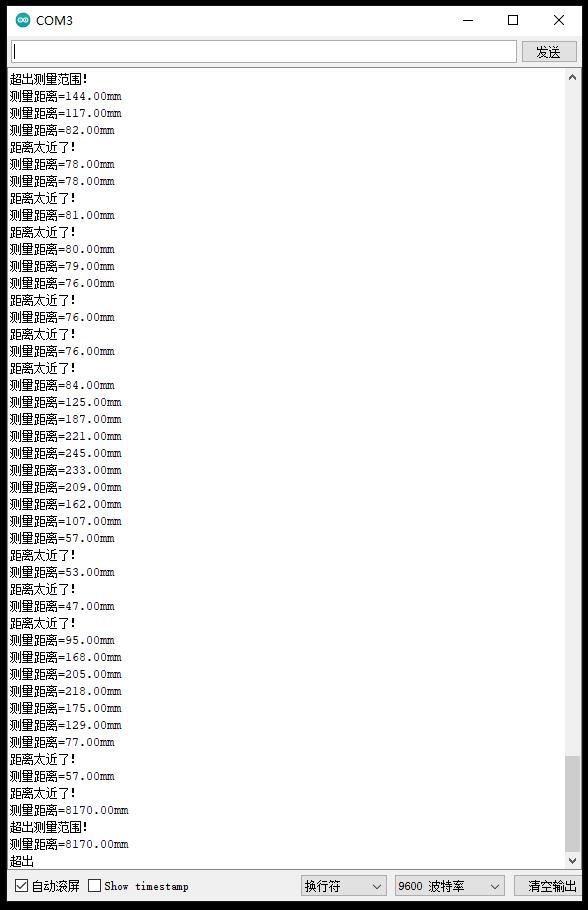
}实验串口返回情况
实验串口绘图器返回情况
VL53L0X的测量功能
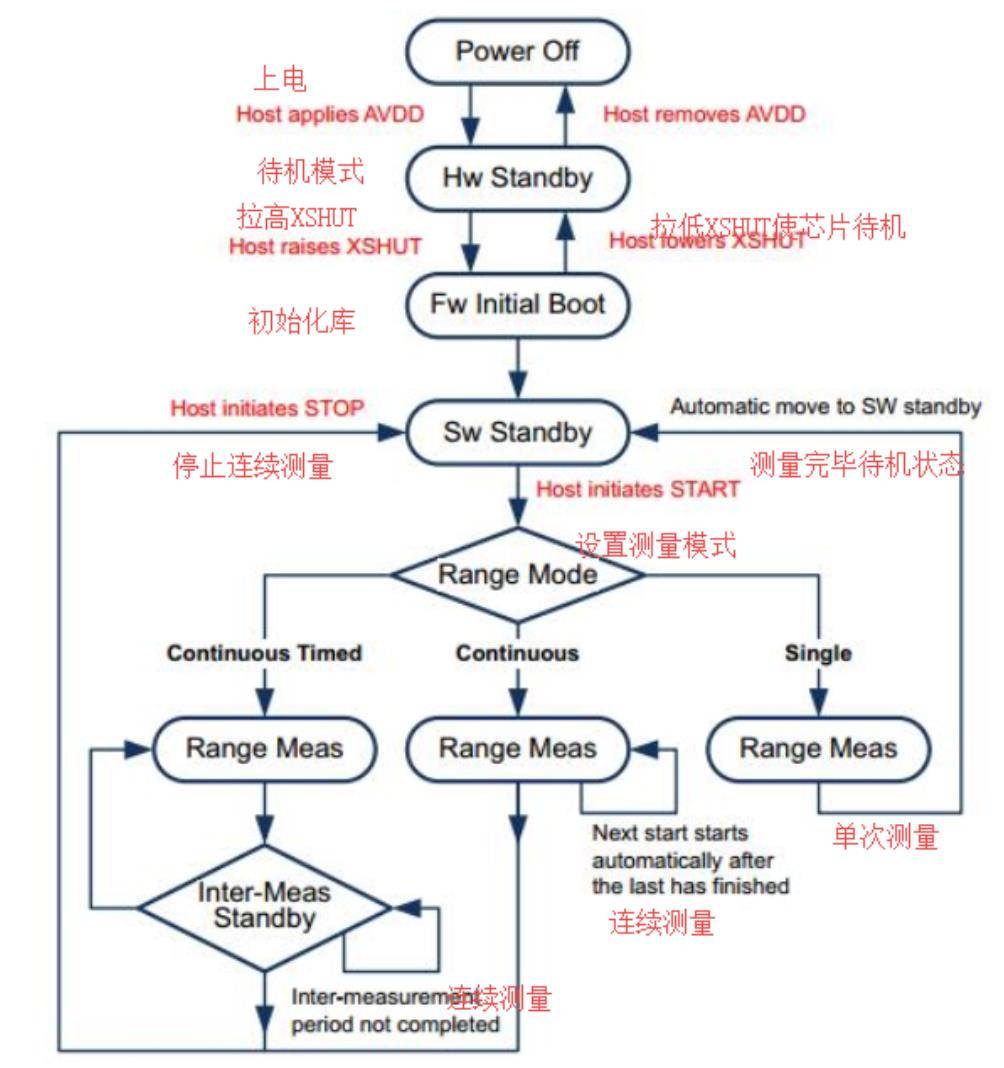
1、测量模式
VL53L0X提供三种测量模式,分别是单次测量(Single ranging)、连续测量(Continuous ranging)、定时测量(Timed ranging)。
单次测量,只测量一次,测量完毕处于待机状态,需再一次触发才会测量
连续测量,启动测量后会连续测量,除非用户主动停止
定时测量,用户指定测量周期的连续测量
2、测量精度
VL53L0X提供四种测距精度选择,默认配置、高速测距、高精度测距、长距离测距。这四种模式的适用于不同场合,优缺点互补。

3、测量方式
轮询,测距线程周期调用API测距,获取距离;该方式消耗一定CPU资源。
中断,VL53L0X测量完毕通过GPIO1发送中断信号,通知测距线程读取数据;该方式效率比较高,消耗CPU资源少。
4、测量流程
VL53L0X用户手册提供了一个轮询方式的测距流程图,根据该流程图调用相应的库函数API即可完成一个测量过程。
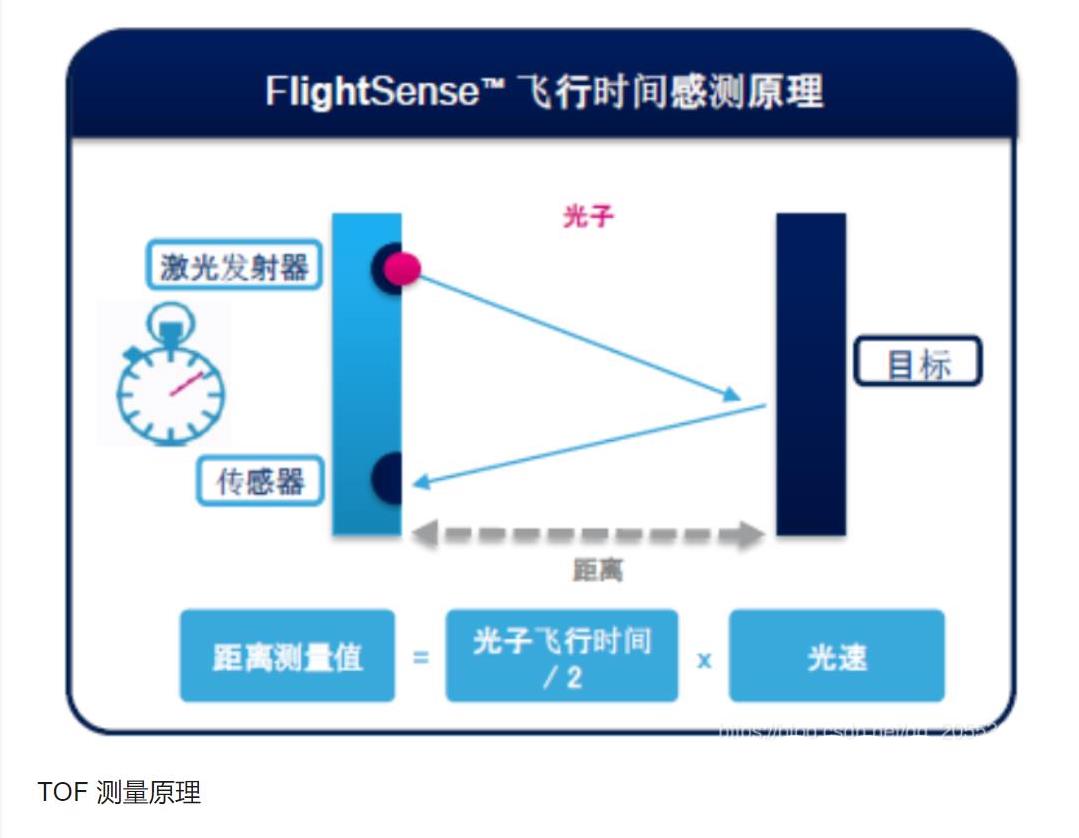
Time of flight(TOF)
中文翻译为“飞行时间”。飞行时间技术在广义上可理解为通过测量物体、粒子或波在固定介质中飞越一定距离所耗费时间(介质/距离/时间均为已知或可测量),从而进一步理解离子或媒介某些性质的技术。TOF的基本原理是通过灯光发射器发射光脉冲,遇到障碍物后反射;接收器接收反射回来的光脉冲,并根据光脉冲的往返时间计算与物体之间的距离。
来自 VL53L0X传感器的参考精度
除了操作模式的设置外,传感器的精度主要取决于被测物体的表面。可以非常精确地测量木材、亚光塑料、纸板等非反射物体。不会反射太多的金属也能提供非常好的效果。使用反射物体(例如玻璃或非常光滑的反射表面)获得的效果明显较差。在实际测试中,对各种物体(塑料、玻璃、金属)进行了不同距离的测量,从中可以得到以下结果:
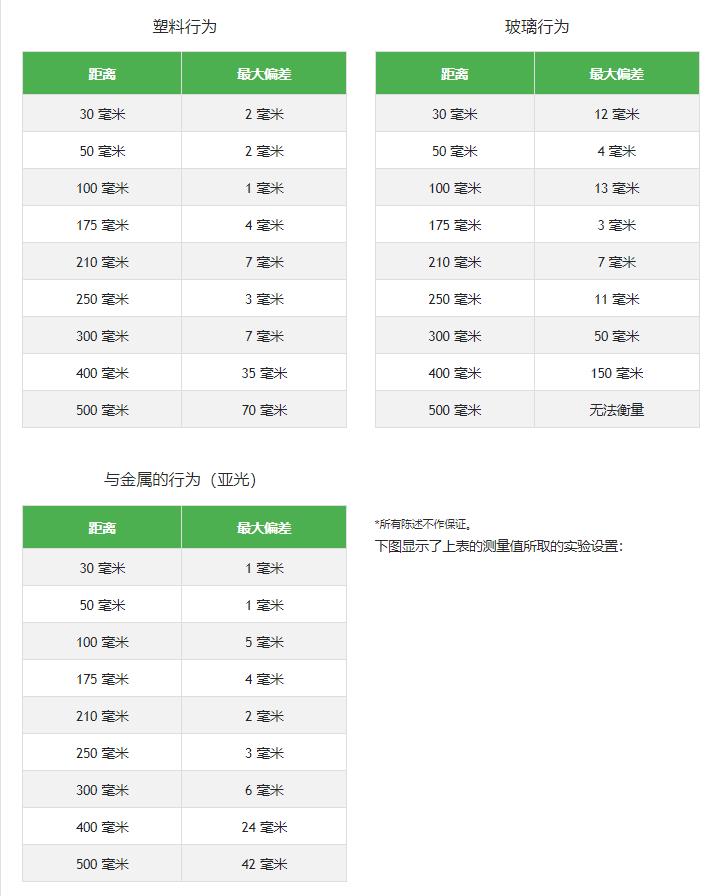
总而言之,可以说与已知的 Arduino 超声波传感器相比,该传感器要准确得多。实际上,该传感器在 50 到 350 毫米左右的近距离范围内可以很好地使用。应该注意的是,该传感器不是点状测量的,而是具有一个小锥体。这意味着在 30 厘米以上的距离内,可能会出现来自周围物体或表面的清晰反射,进而影响测量。尽管如此,该传感器最多可以测量两米的距离。因此,在对墙壁或天花板进行测量时,即使在超过一米的距离内也能获得精确的结果。另一个影响因素是太阳辐射和多个传感器同时在附近运行。
实验开源图形编程(Mind+、编玩边学)
项目之五:简易测距,设置超范围提示,近距离灯光报警(阙值80毫米)

实验串口返回情况
Arduino实验场景图

【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十八:GY-530 VL53L0X 激光测距 ToF测距 飞行时间测距传感器模块 IIC通信协议
项目之六:使用Adafruit_VL53L0X.h库测量距离(范围40mm-1000mm)
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十八:GY-530 VL53L0X 激光测距 ToF测距 飞行时间测距传感器模块 IIC通信协议
项目之六:使用Adafruit_VL53L0X.h库测量距离(范围40mm-1000mm)
模块接线:
VL53L0X Arduino
VCC 5V
GND GND
SCL A5
SDA A4
*/
#include "Adafruit_VL53L0X.h"
Adafruit_VL53L0X lox = Adafruit_VL53L0X();
void setup() {
Serial.begin(115200);
// wait until serial port opens for native USB devices
while (! Serial) {
delay(1);
}
Serial.println("Adafruit VL53L0X test");
if (!lox.begin()) {
Serial.println(F("Failed to boot VL53L0X"));
while (1);
}
// power
Serial.println(F("VL53L0X API Simple Ranging example\n\n"));
}
void loop() {
VL53L0X_RangingMeasurementData_t measure;
Serial.print("Reading a measurement... ");
lox.rangingTest(&measure, false); // pass in 'true' to get debug data printout!
if (measure.RangeStatus != 4) { // phase failures have incorrect data
Serial.print("Distance (mm): "); Serial.println(measure.RangeMilliMeter);
} else {
Serial.println(" out of range ");
}
delay(100);
}实验串口返回情况
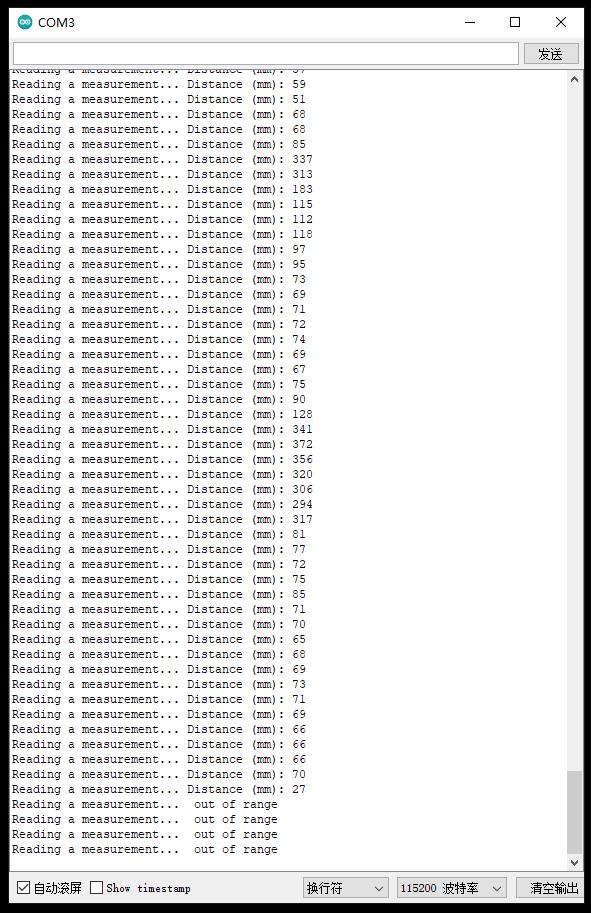
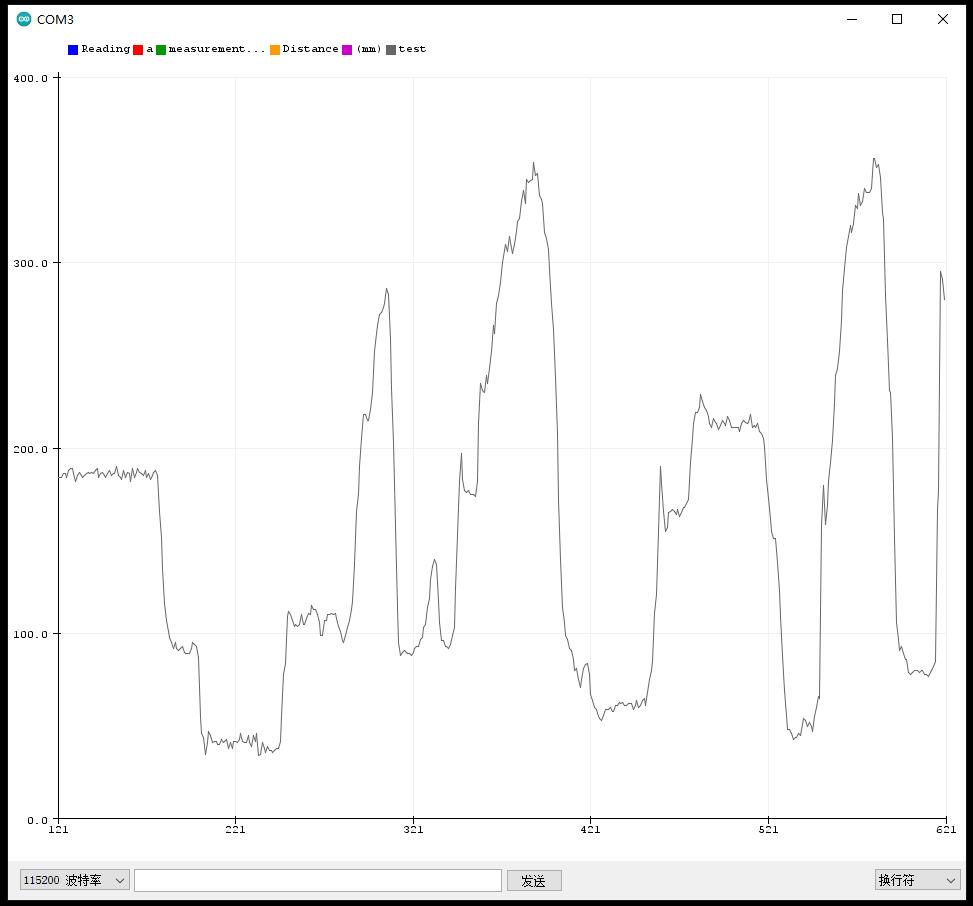
实验串口绘图器返回情况


 他的勋章
他的勋章

三春牛-创客2024.03.24
赞赞赞
三春牛-创客2024.03.24
不错不错
伦**2024.03.20
666
9mm2023.08.19
666