 返回首页
返回首页
 回到顶部
回到顶部
本项目是一个基于MQTT协议的智能小车远程可视控制系统,通过本地部署的SIOT服务器作为通信枢纽,结合Web控制界面和实时视频传输技术,实现了通过手机屏幕远程操控小车并实时观察周围环境的功能。系统采用行空板K10作为主控制器,用户可以在手机或电脑浏览器上通过直观的控制按钮发送指令,同时观看从小车摄像头传回的实时视频画面,真正实现"看着屏幕开车"的精准操控体验,让用户能够清晰掌握小车位置和周边障碍物情况。

步骤1 项目概述
本项目实现了一个基于Web的智能小车遥控系统,通过MQTT协议实现无线控制,结合实时视频传输功能,让用户可以看着手机屏幕远程操控小车并观察周围环境。
步骤2 系统架构
手机/电脑浏览器 (Web客户端)
↓
MQTT over WebSocket
↓
SIOT服务器 (本地部署)
↓
行空板K10主控(带摄像头)
↓
小车电机
步骤3 硬件需求
1. 主控设备
- 行空板K10:作为小车主控制器(内置摄像头模块)
- 支持WiFi连接和MQTT通信
2. 小车底盘
- 带电机驱动扩展板
- 直流电机 x2
- 车轮 x2
- 万向轮 x1
- 电池组
3. 网络设备
- 无线路由器(用于连接行空板和手机)
步骤4 软件环境搭建
1. SIOT服务器部署
Siot下载安装等知识详见:https://mindplus.dfrobot.com.cn/dashboard
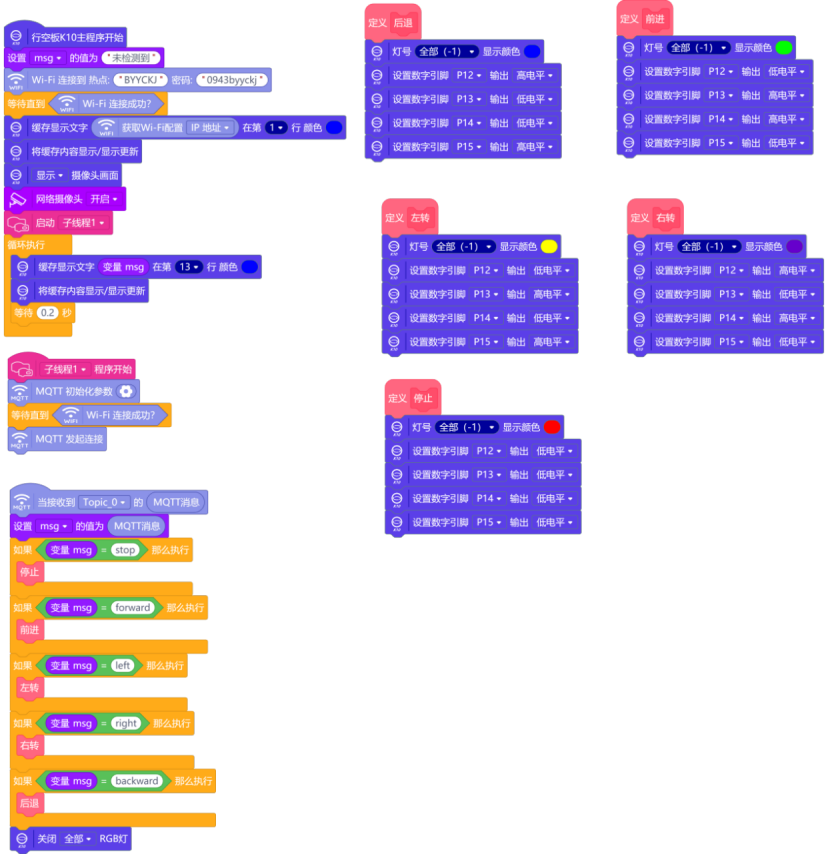
2. 行空板K10程序
小车控制程序和视频流
步骤5 Web控制端
使用提示词完成web开发(很容易)
详细配置请看提示词文档

功能特性
1. 实时视频监控:240×320像素视频窗口
2. 小车控制:5方向控制按钮
3. MQTT通信:WebSocket连接SIOT服务器
4. 消息监控:实时显示控制指令
5. 响应式设计:适配手机和桌面设备
步骤6 总结
本项目成功实现了基于Web的智能小车远程控制系统,通过结合MQTT通信和实时视频传输技术,为用户提供了直观的远程操控体验。系统具有部署简单、成本低廉、扩展性强等优点,适用于教育和娱乐等多种场景。
作者公众号

附件
附件


 他的勋章
他的勋章

评论