 返回首页
返回首页
 回到顶部
回到顶部
一、前言
之所以叫第一代,觉得还有很多提升空间,例如继电器和电池都在板子底下,不安全,容易“爆装备”,小车电池应该和安防电池公用一块不知道行不行。还想加一个机械臂、FPV摄像头等等,已经在准备中了。废话不多说,快来看看吧
二、需求描述
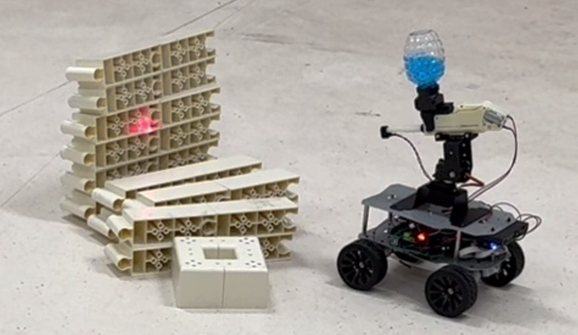
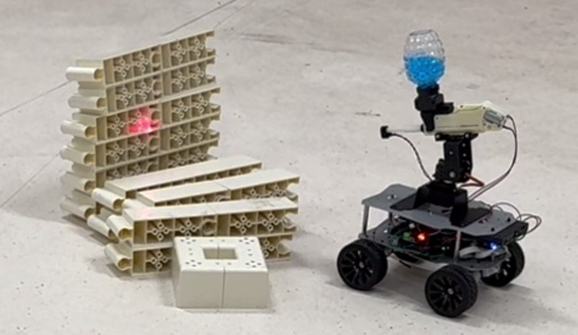
使用2舵机组成云台,架设机枪,可以精准控制发射角度;搭配激光灯辅助瞄准;使用四电机驱动小车,pwm控制高速前进;
原本想用MQTT控制,但Arduino只支持5个订阅,根本不够,在这种情况下我想到了使用PS2手柄,使用后我才发现这个手柄多么强大!而且才32块钱!!!
三、硬件准备
1.舵机
双舵机组成云台架设机枪。

2.霍尔电机

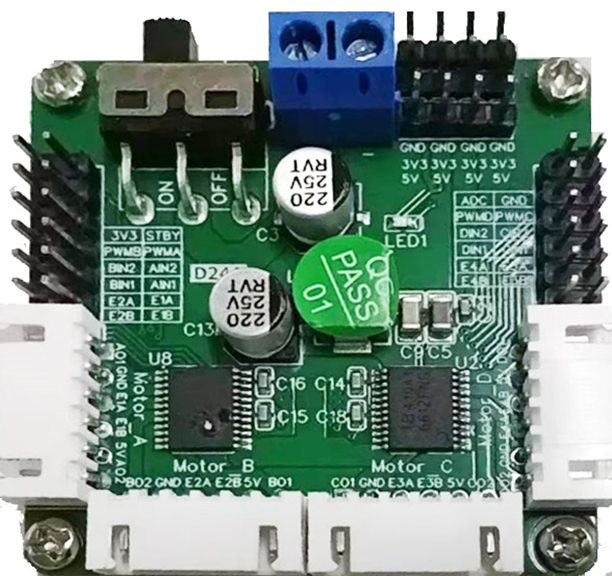
3.TB6612FNG四电机驱动
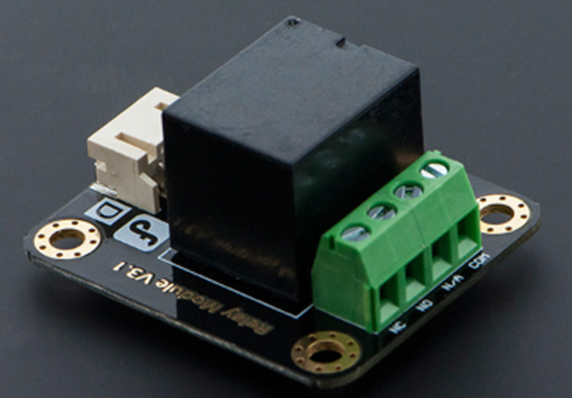
4.继电器
5.PS2遥控器

6.激光灯
辅助瞄准,通过引脚的高低电平控制。
7.Arduino Mega
我为什么要用这一款呢?原本计划用Arduino Uno,但是四电机占用了12个引脚,还剩7个模拟接口,再接2舵机、4引脚、1激光灯,虽说勉勉强强,但是如果后续再扩展其他功能就捉襟见肘了!我能想到的就是Mega了。
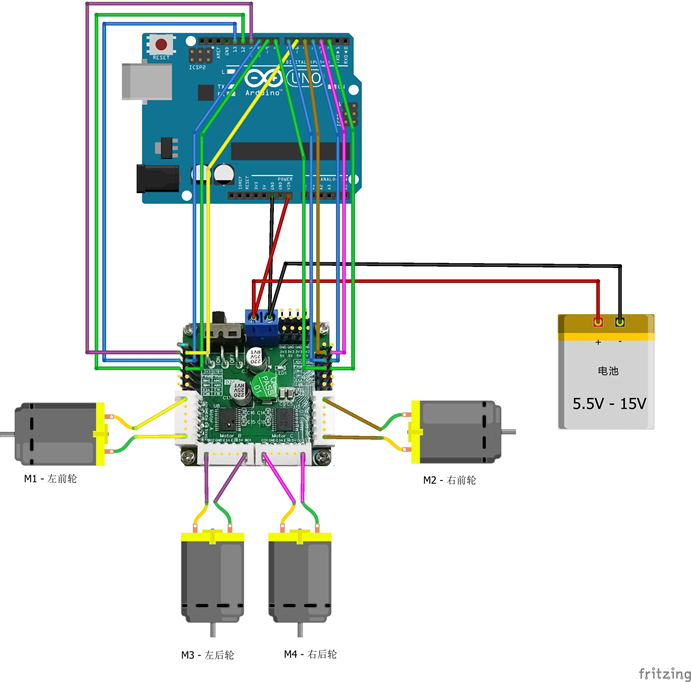
四、电机接线示意图
五、动一动
PWM接Arduino的PWM引脚,in1和in2一高一低,再连接使能引脚,其他3个霍尔电机连接同样道理。
一定要注意,PS2手柄接收机端要求的试3.3v和5v,不然就会烧坏!切记!
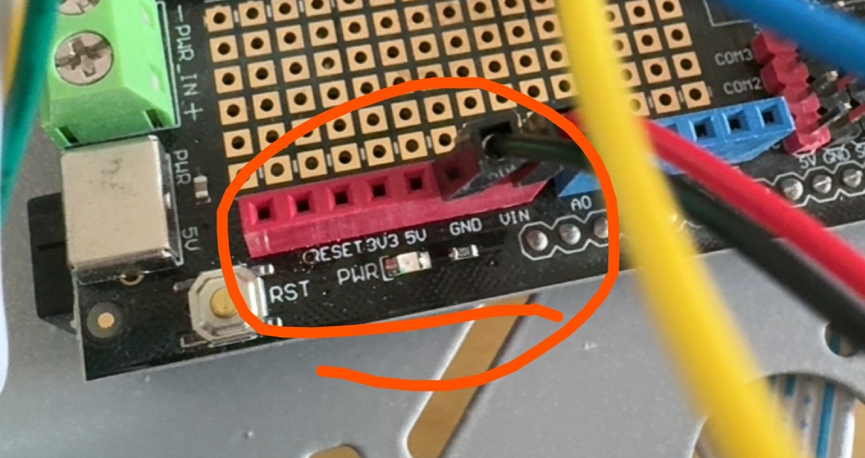
接收机由板载供电,无需接电,手柄需要2节7号。

六、编程逻辑
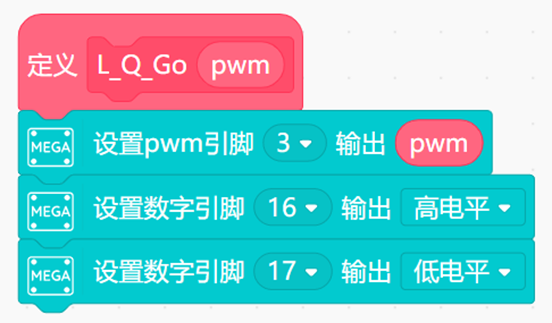
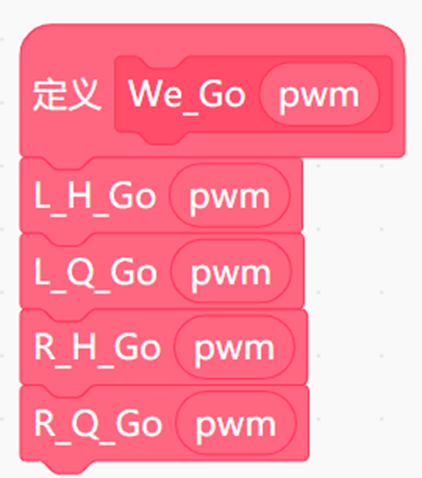
全部使用Mind+图形化编程,提高程序复用率,将部分功能编写进函数。完整程序附在后面,此处展示部分内容。
1.左前轮前进
2.四驱前进
3.手柄配置
手柄连接很简单,只需要按要求连接好、引脚对应好就行,切记引脚电压!切记引脚正反!

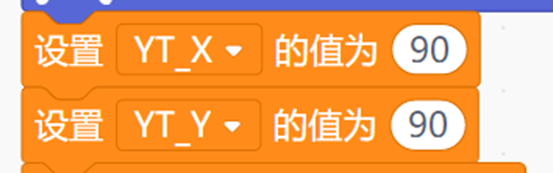
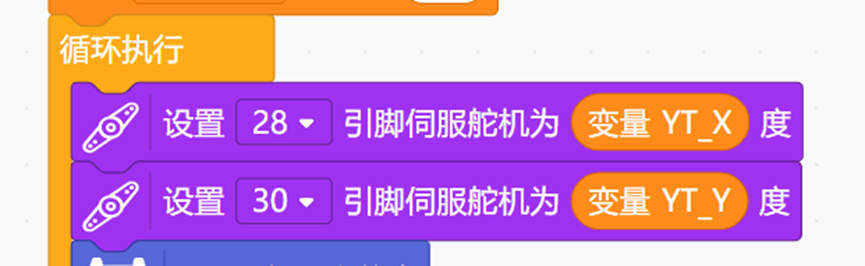
4.舵机配置
将舵机的x和y创建为变量,通过变量控制
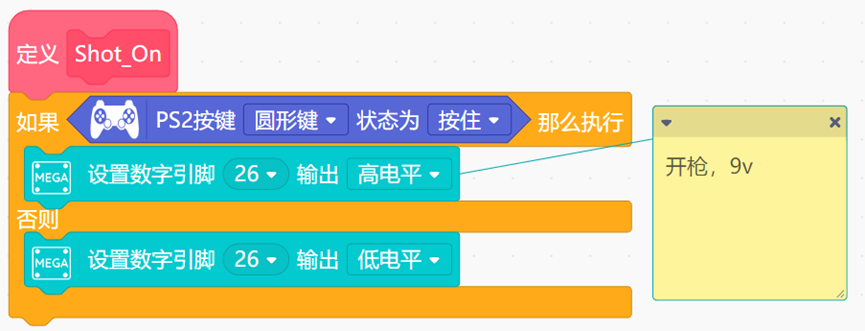
5.机枪配置
6.遥控器与云台的配合
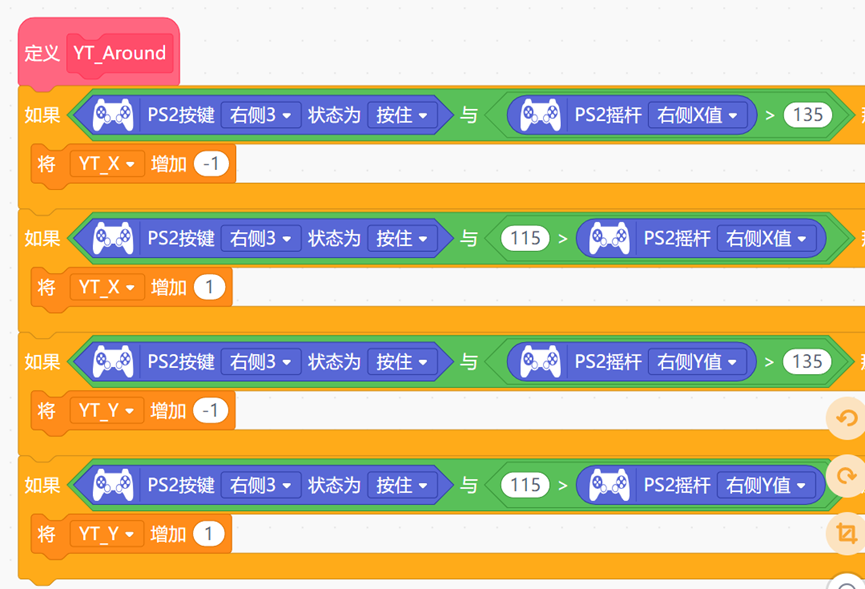
7.方向运动
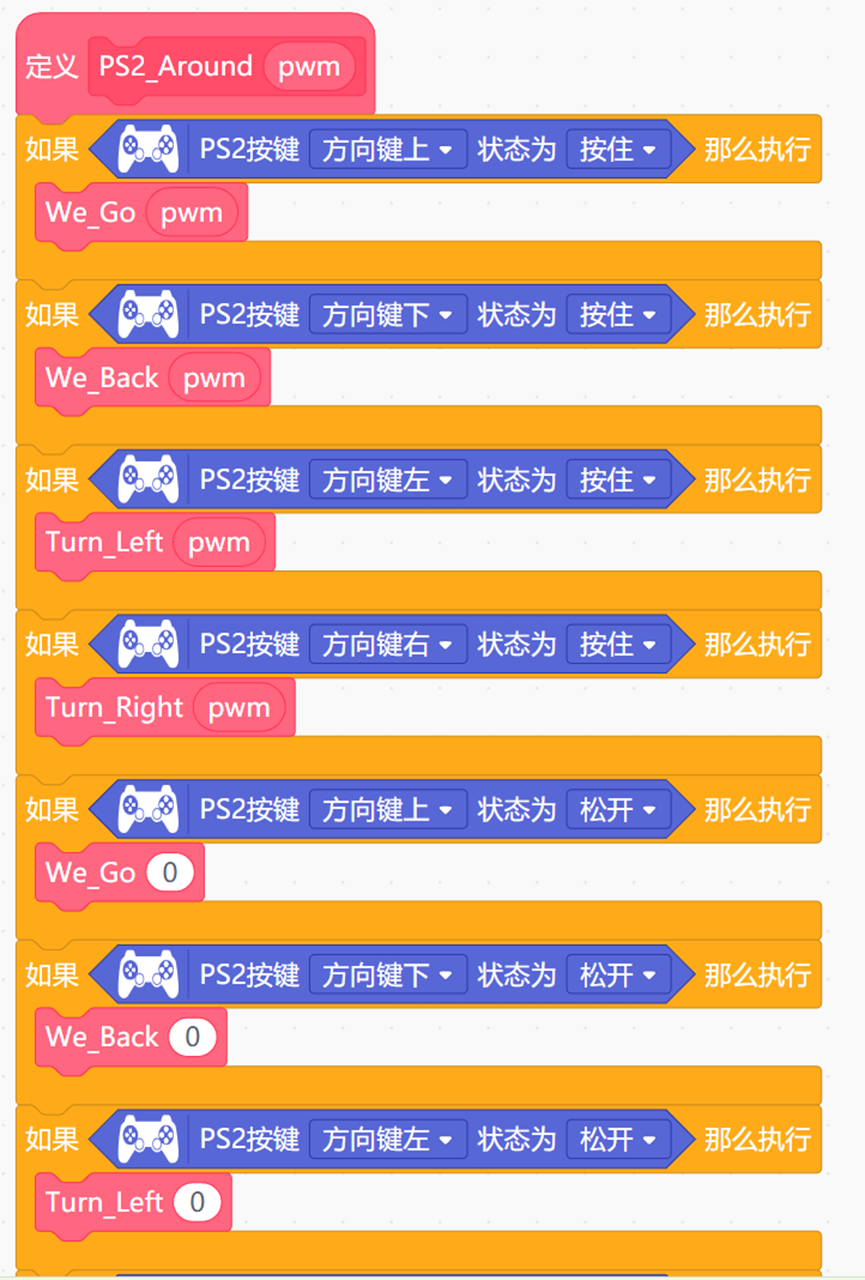
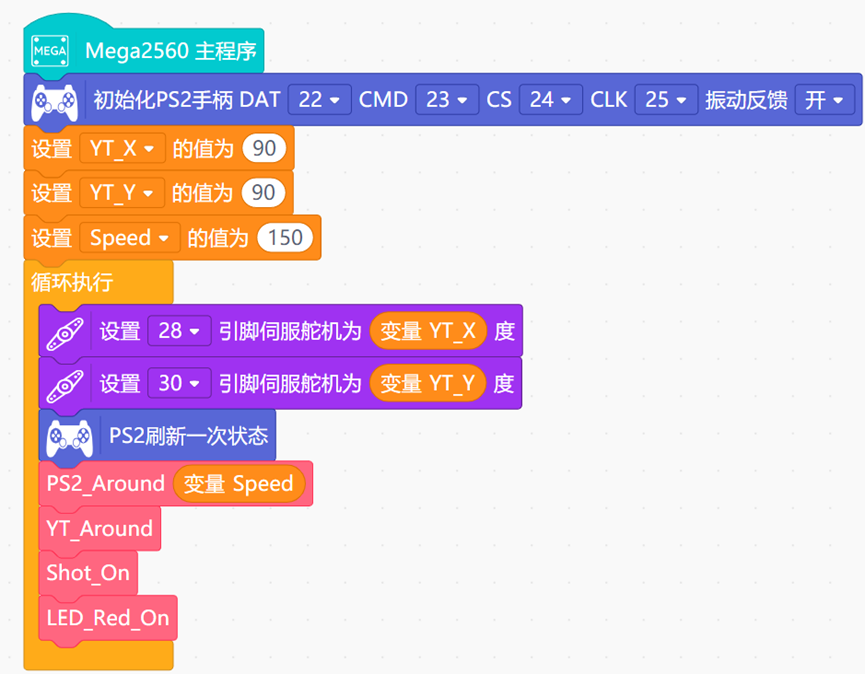
7.主函数
七、不足与改进
既然是第一代,那就是满足了基本功能,但仍然有升级空间。我已经想着提升路径了。
1.巡航模式
一键开启小车自动巡航、穿梭在角落中。
2.自动报警
搭配二哈,熟人通过、陌生人报警。
3.速度切换
最大限度发挥4个霍尔电机工作效率,低速低扭矩前进在崎岖路段、pwm最大值穿梭在公路平整路段。
4.机械臂
PS2手柄还有一个方向拨杆,不能浪费,不如装一个机械臂。
【未完待续……谢谢各位!】


 他的勋章
他的勋章

评论