 返回首页
返回首页
 回到顶部
回到顶部
《丝路智行:从历史密码到 AI 编程》系列课程包含 20 节正课与 20 个拓展项目。该项目是系列课程拓展项目之一。
步骤1 故事引入
在古老的丝绸之路上,驿马不仅是速度的象征,更是智慧的载体。它们穿梭于沙丘与绿洲之间,凭借敏锐的直觉避开险阻,将重要的文书与货物安全送达远方。如今,我们借助现代科技,让驿马“重生”——通过超声波传感器,驿马能够“感知”前方的障碍,如同昔日的驿马凭借经验避开沙丘与驼队。本项目旨在通过超声波测距与智能控制,重现驿马在复杂环境中的自主行进能力,延续丝路通信的智慧与使命。
步骤2 项目目标
用超声波实时测距,通过手动按压按钮,实现待机、避障和跟随模式切换:
1、待机模式:驿马静止,等待指令
2、避障模式:检测到障碍物时自动后退并转向,确保安全通行
当距离小于某值时,小车自动后退并转向,避开障碍物继续前行。
3、跟随模式:保持与前方物体(如驼队)的适当距离,实现智能跟随
当距离过大,小车前进跟随,当距离小于某值时,后退避让。
步骤3 硬件清单
行空板 K10 ×1
扩展板(带双路电机驱动)×1
小车底盘(TT 马达×2,轮×2)×1
HC-SR04 超声波模块 ×1
9 V 电池 ×1
杜邦线若干
步骤4 接线速查
Trig → P0 Echo → P1
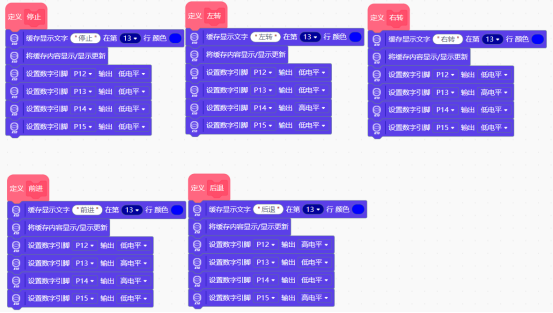
右轮:M1 P12/ P13
左轮:M2 P14 / P15
步骤5 程序编写
1、初始化:屏幕显示“驿马待命”,所有电机引脚=低,变量“模式”=待机。
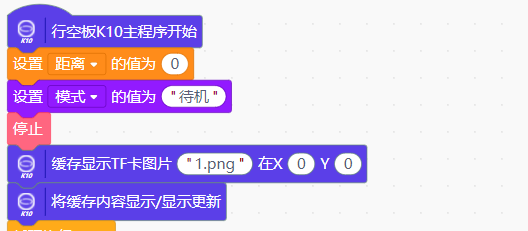
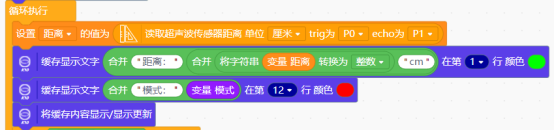
2、主循环:
‑ 读取超声波距离 d
‑ 显示距离(第1行)+ 当前模式(第2行)
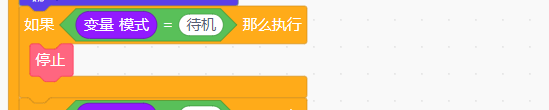
3、模式判断:
A:待机模式 “模式”=待机
B:避障模式 “模式”=避障
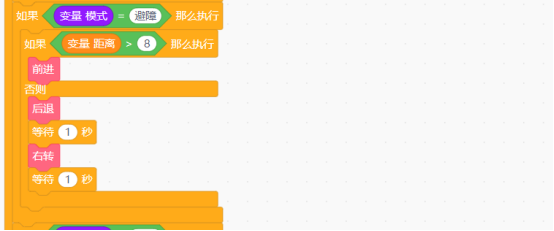
C:跟随模式 “模式”=避障

4、模式切换
按压A键,切换避障和跟随模式,按压B键回到待机模式。

5、相关函数
步骤6 项目总结
“超声避驼铃”不仅是技术的实践,更是对丝路精神的传承。驿马传信,传的不仅是文书货物,更是跨越千年的智慧与信任。本项目通过超声波与自动控制,让古老的驿马在数字时代焕发新生,延续那条连接东西的丝路传奇。
附件
作者公众号



 他的勋章
他的勋章

评论