 返回首页
返回首页
 回到顶部
回到顶部

【项目背景】
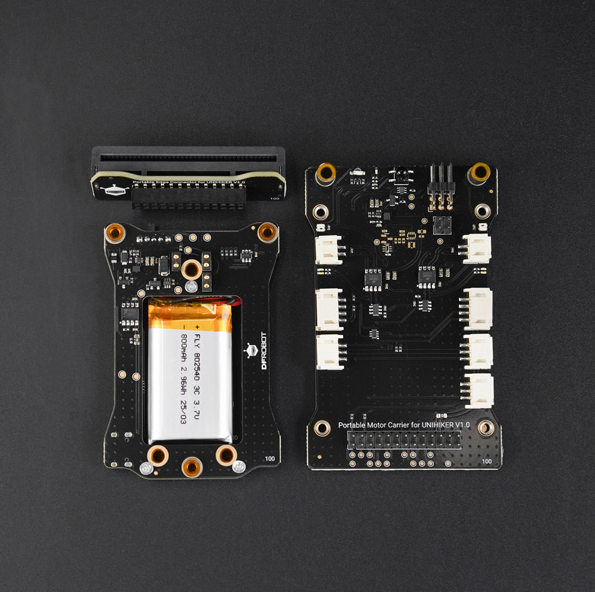
最近收到了期待已久的 行空板 + 扩展板组合,扩展板不仅内置电池,还引出了了多个 IO 接口,大大增强了便携性和扩展能力。这种“自带电源+多接口”的组合形式,给我带来了更多移动端项目的灵感。
恰好最近在研究小智机器狗,并且看到社区里不少大佬分享了使用 MCP 协议控制其他设备的案例,我便萌生了一个想法:能不能也做一只可以用小智控制的机器狗?就这样,项目正式启动,又一段折腾之旅开始了!
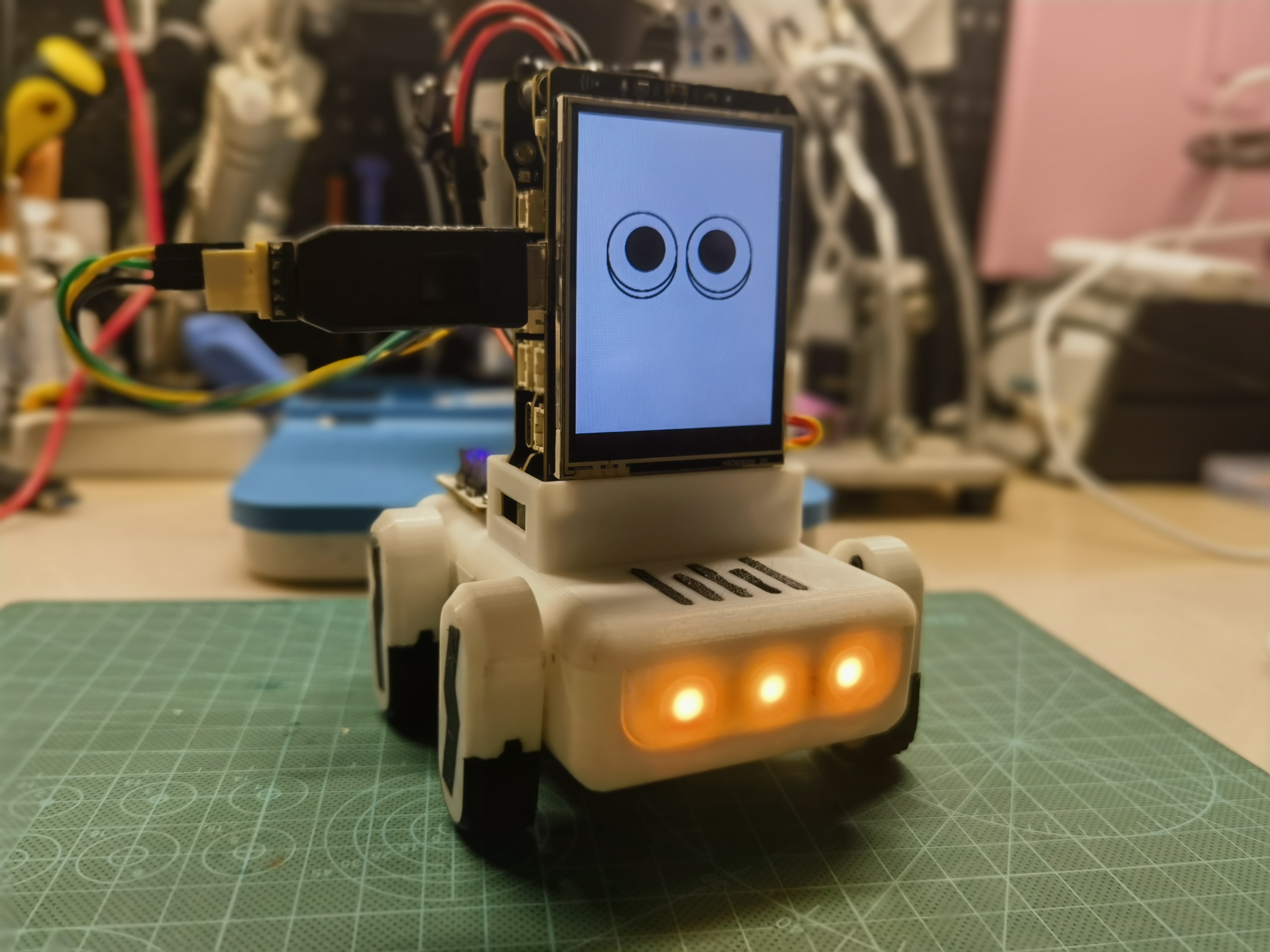
【功能演示】
原本的想法是直连四个舵机,因为扩展板组合引出了两路5v舵机接口,并且行空板自身还有几路pwm输出的,感觉应该是足够的,但是最终步态的测试效果不尽如人意,具体的原因还在找,目前先用舵机驱动板替代,通过usb转串口来控制,功能正常就是外形丑了点。
材料清单
- 行空板M10 X1
- 行空板扩展组合 X1
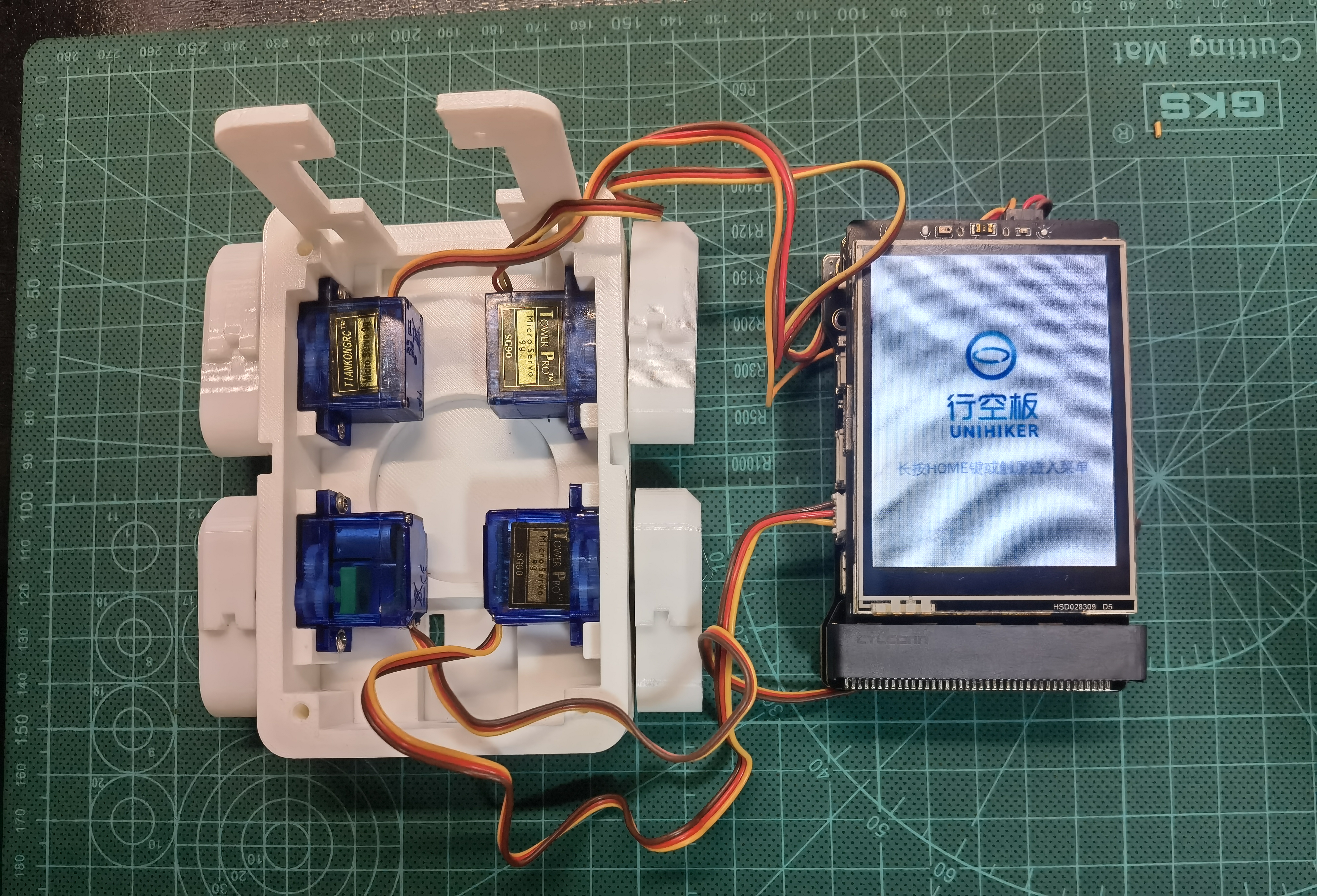
- 9g舵机 X4
- RGB灯带 X1
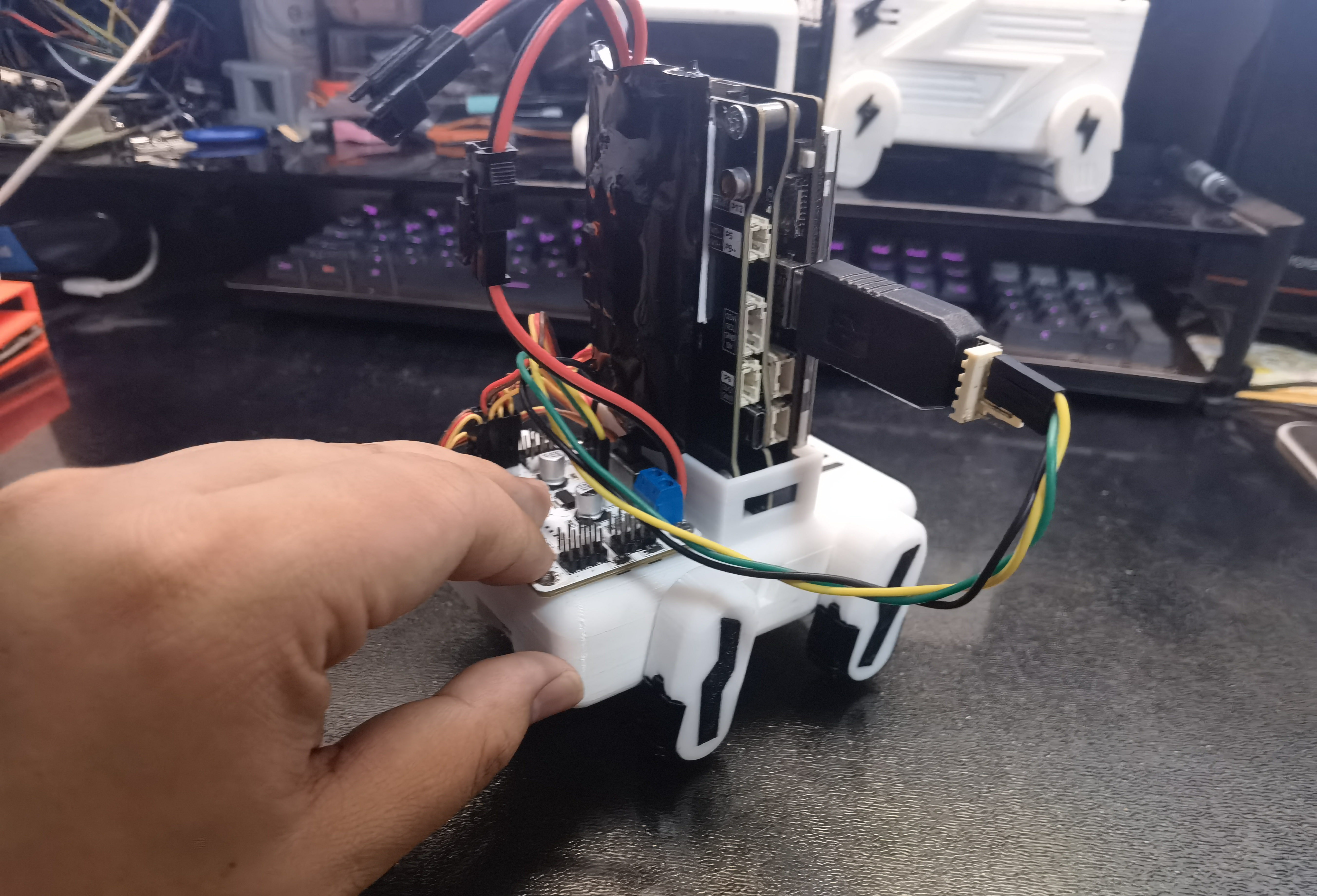
- 舵机驱动板 X1
- usb转串口模块 X1
- 3d打印件 X1
【硬件组装】
步骤1 舵机和RGB灯带装入底盘并固定好,4个舵机接入舵机控制板。
步骤2 usb转串口 插 行空板M10 usb口,rx tx 与舵机驱动板 tx rx 连接。
步骤3 灯带接入扩展组合背面P4,组装其他3d打印组件
【程序逻辑】
主控端:任意版本小智(推荐K10 )
受控端:行空板M10
行空板 M10 端提前启动 MCP 服务端,并正确填入对应的 MCP 接入点。
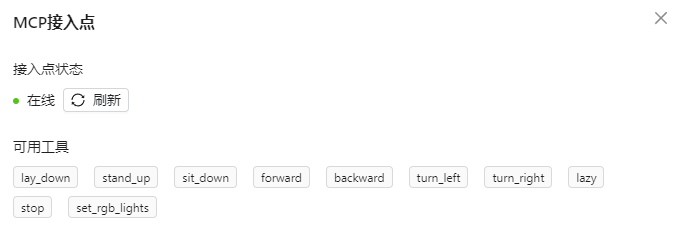
在 M10 上运行 mcp_pipe.py 和 dog.py,系统将自动连接小智平台。一旦连接成功,小智平台的 MCP 工具栏中将显示本项目注册的工具,表示机器狗已成功上线并可以被远程控制,接下来就可以使用小智来控制机器狗了。
【环境搭建】
行空板默认的3.7 python环境不能运行mcp服务端,需要安装3.12的python版本。
具体安装教程参考 云天大佬的教程
https://makelog.dfrobot.com.cn/article-317610.html
比较推荐用pyenv来安装
https://gitee.com/liliang9693/unihiker-pyenv-python
环境安装好后 依次安装依赖库。
【运行程序】
步骤4 配置好舵机驱动板内的动作步态,如果和我的驱动板型号一样,可以私发动作文件。
步骤5 修改 mcp_pipe.py 中的 endpoint_url 项为自己小智mcp接入点的地址
步骤6 mcp_pipe.py 和dog.py 两个拷贝到行空板文件目录
步骤7 在终端里cd到文件所在目录,然后启动服务端 :python mcp_pipe.py
步骤8 等待连通后,小智mcp后台出现下图工具后即可使用小智来进行控制了
#mcp_pipe.py
"""
This script is used to connect to the MCP server and pipe the input and output to the websocket endpoint.
Version: 0.1.0
Usage:
export MCP_ENDPOINT=
python mcp_pipe.py
"""
import asyncio
import websockets
import subprocess
import logging
import os
import time
import signal
import sys
import random
from dotenv import load_dotenv
from pinpong.board import Board,Pin,NeoPixel,UART
import serial
from pinpong.extension.unihiker import *
import json
from unihiker import GUI
u_gui=GUI()
ser=serial.Serial("/dev/ttyUSB0",9600)
Board().begin()
np1 = NeoPixel(Pin((Pin.P4)),3) #定义灯带
np1[0] = (0,0,0)
np1[1] = (0,0,0)
np1[2] = (0,0,0)
def sendx(x,t):
buf = bytearray(b'\x55\x55')
buf.append(5 & 0xff)
buf.append(6 & 0xff)
buf.append(x & 0xff)
buf.append(t & 0xff)
buf.append(0 & 0xff)
ser.write(buf)
def stopx():
buf = bytearray(b'\x55\x55')
buf.append(2 & 0xff)
buf.append(7 & 0xff)
ser.write(buf)
sendx(0,1)
# Configure logging
logging.basicConfig(
level=logging.INFO,
format='%(asctime)s - %(name)s - %(levelname)s - %(message)s'
)
logger = logging.getLogger('MCP_PIPE')
# Reconnection settings
INITIAL_BACKOFF = 1 # Initial wait time in seconds
MAX_BACKOFF = 600 # Maximum wait time in seconds
reconnect_attempt = 0
backoff = INITIAL_BACKOFF
def pose_is(target_lf, target_rf, target_rb, target_lb, tolerance=1):
return (abs(lf_angle - target_lf) < tolerance and
abs(rf_angle - target_rf) < tolerance and
abs(rb_angle - target_rb) < tolerance and
abs(lb_angle - target_lb) < tolerance)
async def connect_with_retry(uri):
"""Connect to WebSocket server with retry mechanism"""
global reconnect_attempt, backoff
while True: # Infinite reconnection
try:
if reconnect_attempt > 0:
wait_time = backoff * (1 + random.random() * 0.1) # Add some random jitter
logger.info(f"Waiting {wait_time:.2f} seconds before reconnection attempt {reconnect_attempt}...")
await asyncio.sleep(wait_time)
# Attempt to connect
await connect_to_server(uri)
except Exception as e:
reconnect_attempt += 1
logger.warning(f"Connection closed (attempt: {reconnect_attempt}): {e}")
# Calculate wait time for next reconnection (exponential backoff)
backoff = min(backoff * 2, MAX_BACKOFF)
async def connect_to_server(uri):
"""Connect to WebSocket server and establish bidirectional communication with `mcp_script`"""
global reconnect_attempt, backoff
try:
logger.info(f"正在连接服务器...")
async with websockets.connect(uri) as websocket:
logger.info(f"已连接 WebSocket")
# Reset reconnection counter if connection closes normally
reconnect_attempt = 0
backoff = INITIAL_BACKOFF
# Start mcp_script process
process = subprocess.Popen(
['python', mcp_script],
stdin=subprocess.PIPE,
stdout=subprocess.PIPE,
stderr=subprocess.PIPE,
encoding='utf-8',
text=True # Use text mode
)
logger.info(f"启动子进程: {mcp_script} ")
u_gui.draw_emoji(emoji="Peace",x=0,y=0,duration=5)
sendx(0,1)
# Create two tasks: read from WebSocket and write to process, read from process and write to WebSocket
await asyncio.gather(
pipe_websocket_to_process(websocket, process),
pipe_process_to_websocket(process, websocket),
pipe_process_stderr_to_terminal(process)
)
except websockets.exceptions.ConnectionClosed as e:
logger.error(f"WebSocket 连接已关闭: {e}")
raise # Re-throw exception to trigger reconnection
except Exception as e:
logger.error(f"连接错误: {e}")
raise # Re-throw exception
finally:
# Ensure the child process is properly terminated
if 'process' in locals():
logger.info(f"正在终止子程序 {mcp_script} ")
try:
process.terminate()
process.wait(timeout=5)
except subprocess.TimeoutExpired:
process.kill()
logger.info(f"{mcp_script} 已终止")
async def pipe_websocket_to_process(websocket, process):
"""Read data from WebSocket and write to process stdin"""
try:
while True:
# Read message from WebSocket
message = await websocket.recv()
logger.debug(f"<< {message[:120]}...")
# Write to process stdin (in text mode)
if isinstance(message, bytes):
message = message.decode('utf-8')
process.stdin.write(message + '\n')
process.stdin.flush()
except Exception as e:
logger.error(f"Error in WebSocket to process pipe: {e}")
raise # Re-throw exception to trigger reconnection
finally:
# Close process stdin
if not process.stdin.closed:
process.stdin.close()
async def pipe_process_to_websocket(process, websocket):
"""Read data from process stdout and send to WebSocket"""
try:
while True:
# Read data from process stdout
data = await asyncio.get_event_loop().run_in_executor(
None, process.stdout.readline
)
if not data: # If no data, the process may have ended
logger.info("Process has ended output")
break
# Send data to WebSocket
logger.debug(f">> {data[:120]}...")
logger.info(data)
# 解析 JSON 字符串
json_str = json.loads(data)
logger.info(json_str['id'])
if json_str['id']>1:
logger.info(json_str['id'])
if json_str.get('result', {}):
text=json.loads(json_str['result']['content'][0]['text'])
if text['success']:
print(text['result'])
if "起立" in text['result']:
sendx(0,1)
if "趴下" in text['result']:
sendx(1,1)
if "坐下" in text['result']:
sendx(2,1)
if "前进" in text['result']:
sendx(3,text.get("steps"))
if "后退" in text['result']:
sendx(4,text.get("steps"))
if "左转" in text['result']:
sendx(5,text.get("times"))
if "右转" in text['result']:
sendx(6,text.get("times"))
if "懒腰" in text['result']:
sendx(7,4)
if "打断" in text['result']:
stopx()
if "灯" in text['result']:
led_colors = text.get("led_colors", [])
if len(led_colors) == 3:
for i, color in enumerate(led_colors):
r = color.get("r", 0)
g = color.get("g", 0)
b = color.get("b", 0)
brightness = color.get("brightness", 255)
# 根据亮度比例调整颜色
r = int(r * brightness / 255)
g = int(g * brightness / 255)
b = int(b * brightness / 255)
logger.info(f"设置LED{i}: R={r}, G={g}, B={b}")
np1[i] = (r, g, b)
# In text mode, data is already a string, no need to decode
await websocket.send(data)
except Exception as e:
logger.error(f"Error in process to WebSocket pipe: {e}")
raise # Re-throw exception to trigger reconnection
async def pipe_process_stderr_to_terminal(process):
"""Read data from process stderr and print to terminal"""
try:
while True:
# Read data from process stderr
data = await asyncio.get_event_loop().run_in_executor(
None, process.stderr.readline
)
if not data: # If no data, the process may have ended
logger.info("Process has ended stderr output")
break
# Print stderr data to terminal (in text mode, data is already a string)
sys.stderr.write(data)
sys.stderr.flush()
except Exception as e:
logger.error(f"Error in process stderr pipe: {e}")
raise # Re-throw exception to trigger reconnection
def signal_handler(sig, frame):
"""Handle interrupt signals"""
logger.info("Received interrupt signal, shutting down...")
sys.exit(0)
if __name__ == "__main__":
# Register signal handler
signal.signal(signal.SIGINT, signal_handler)
mcp_script = "dog.py"
# Get token from environment variable or command line arguments
#endpoint_url = os.environ.get('MCP_ENDPOINT')
endpoint_url="填入自己的mcp接入点地址"
if not endpoint_url:
logger.error("Please set the `MCP_ENDPOINT` environment variable")
sys.exit(1)
try:
asyncio.run(connect_with_retry(endpoint_url))
except KeyboardInterrupt:
logger.info("Program interrupted by user")
except Exception as e:
logger.error(f"Program execution error: {e}")# dog.py
from mcp.server.fastmcp import FastMCP
import sys
import logging
logger = logging.getLogger("DogBot")
# 修复Windows控制台UTF-8编码问题
if sys.platform == 'win32':
sys.stderr.reconfigure(encoding='utf-8')
sys.stdout.reconfigure(encoding='utf-8')
# 创建MCP服务器
mcp = FastMCP("DogBot")
@mcp.tool()
def lay_down() -> dict:
"""
机器狗趴下
发送串口指令给舵机控制板 实现趴下来的效果
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "机器狗趴下"
logger.info(result)
return {"success": True, "result": result}
@mcp.tool()
def stand_up() -> dict:
"""
机器狗站起来
发送串口指令给舵机控制板 实现站起来的效果
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "机器狗起立"
logger.info(result)
return {"success": True, "result": result}
@mcp.tool()
def sit_down() -> dict:
"""
机器狗坐下来
发送串口指令给舵机控制板 实现坐下的效果
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "机器狗坐下"
logger.info(result)
return {"success": True, "result": result}
@mcp.tool()
def forward(steps:int) -> dict:
"""
机器狗往前走一步
发送串口指令给舵机控制板 实现前进一步的效果,如果命令中包含步数那就照做,不包含的话就2到4步随机。
Returns:
dict: 返回一个字典,包含操作结果,和步数。
"""
result = "机器狗前进"
logger.info(result)
return {"success": True, "result": result,"steps":steps}
@mcp.tool()
def backward(steps:int) -> dict:
"""
机器狗往后退一步
发送串口指令给舵机控制板 实现后退一步的效果,如果命令中包含步数那就照做,不包含的话就2到4步随机。
Returns:
dict: 返回一个字典,包含操作结果,和步数。
"""
result = "机器狗后退"
logger.info(result)
return {"success": True, "result": result,"steps":steps}
@mcp.tool()
def turn_left(times:int) -> dict:
"""
机器狗往左转30°
发送串口指令给舵机控制板 实现左转的效果,你可以根据命令对话里边的角度,计算下需要运行多少次
然后返回出去,小于30°的按30°来旋转。
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "机器狗左转"
logger.info(result)
return {"success": True, "result": result,"times":times}
@mcp.tool()
def turn_right(times:int) -> dict:
"""
机器狗往右转30°
发送串口指令给舵机控制板 实现右转的效果,你可以根据命令对话里边的角度,计算下需要运行多少次
然后返回出去,小于30°的按30°来旋转。
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "机器狗右转"
logger.info(result)
return {"success": True, "result": result,"times":times}
@mcp.tool()
def lazy() -> dict:
"""
机器狗伸懒腰
发送串口指令给舵机控制板 实现伸懒腰的效果
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "机器狗伸懒腰"
logger.info(result)
return {"success": True, "result": result}
@mcp.tool()
def stop() -> dict:
"""
机器狗动作打断
立即打断机器狗目前所执行的动作,让机器狗停下来。
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "机器狗打断"
logger.info(result)
return {"success": True, "result": result}
@mcp.tool()
def set_rgb_lights(led_colors: list[dict]) -> dict:
"""
设置3个RGB灯珠的颜色,每个灯包含字段 r, g, b, brightness(范围 0~255)
如果只是简单的开灯 那就都设置为255,如果需要关灯就都设置为0。
参数示例:
[
{"r": 255, "g": 0, "b": 0, "brightness": 255},
{"r": 0, "g": 255, "b": 0, "brightness": 128},
{"r": 0, "g": 0, "b": 255, "brightness": 200}
]
"""
# 这里返回默认值,AI 会覆盖这个返回值
result = "灯光设置成功"
return {"success": True, "result": result, "led_colors": led_colors}
# 启动服务器
if __name__ == "__main__":
logger.info("子程序启动成功!")
mcp.run(transport="stdio")附件


 他的勋章
他的勋章
评论