 返回首页
返回首页
 回到顶部
回到顶部
背景
目前市面上的机器小车具备的功能还不够全面,我这款设计主要是针对家用机器人,可以提供温湿度监测和LED状态显示,可以实时显示室内的温湿度,并根据温湿度进行报警和LED指示,并可以进行语音呼叫,让小车可以自由的运行,可以实时控制小车进行温湿度显示和报警。
硬件清单
行空板M10
DHT11温湿度传感器
扬声器模块
RGB LED灯
灰度传感器(巡线用)
红外避障模块
TT马达(带电机驱动板)
电池扩展板
完整程序代码
import time
import RPi.GPIO as GPIO
from unihiker import GUI
import Adafruit_DHT
import pygame
from threading import Thread
# 初始化GUI
gui = GUI()
# 引脚定义
DHT_PIN = 10 # 温湿度传感器
BUZZER_PIN = 11 # 蜂鸣器
RGB_RED = 12 # RGB红灯
RGB_GREEN = 13 # RGB绿灯
RGB_BLUE = 14 # RGB蓝灯
GRAY_LEFT = 15 # 左侧灰度传感器
GRAY_RIGHT = 16 # 右侧灰度传感器
IR_LEFT = 17 # 左侧红外避障
IR_RIGHT = 18 # 右侧红外避障
MOTOR_A1 = 19 # 电机A正极
MOTOR_A2 = 20 # 电机A负极
MOTOR_B1 = 21 # 电机B正极
MOTOR_B2 = 22 # 电机B负极
# 初始化GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(BUZZER_PIN, GPIO.OUT)
GPIO.setup(RGB_RED, GPIO.OUT)
GPIO.setup(RGB_GREEN, GPIO.OUT)
GPIO.setup(RGB_BLUE, GPIO.OUT)
GPIO.setup(GRAY_LEFT, GPIO.IN)
GPIO.setup(GRAY_RIGHT, GPIO.IN)
GPIO.setup(IR_LEFT, GPIO.IN)
GPIO.setup(IR_RIGHT, GPIO.IN)
GPIO.setup(MOTOR_A1, GPIO.OUT)
GPIO.setup(MOTOR_A2, GPIO.OUT)
GPIO.setup(MOTOR_B1, GPIO.OUT)
GPIO.setup(MOTOR_B2, GPIO.OUT)
# 初始化PWM
pwm_red = GPIO.PWM(RGB_RED, 1000)
pwm_green = GPIO.PWM(RGB_GREEN, 1000)
pwm_blue = GPIO.PWM(RGB_BLUE, 1000)
pwm_red.start(0)
pwm_green.start(0)
pwm_blue.start(0)
# 初始化蜂鸣器
buzzer = GPIO.PWM(BUZZER_PIN, 440)
buzzer.start(0)
# 初始化DHT11传感器
dht_sensor = Adafruit_DHT.DHT11
# 初始化pygame音频
pygame.mixer.init()
try:
sound = pygame.mixer.Sound("alert.wav") # 准备一个音频文件
except:
print("未找到音频文件")
# 电机控制函数
def motor_control(a1, a2, b1, b2):
GPIO.output(MOTOR_A1, a1)
GPIO.output(MOTOR_A2, a2)
GPIO.output(MOTOR_B1, b1)
GPIO.output(MOTOR_B2, b2)
def forward():
motor_control(1, 0, 1, 0)
def backward():
motor_control(0, 1, 0, 1)
def left():
motor_control(0, 1, 1, 0)
def right():
motor_control(1, 0, 0, 1)
def stop():
motor_control(0, 0, 0, 0)
# RGB灯控制
def set_rgb(r, g, b):
pwm_red.ChangeDutyCycle(r)
pwm_green.ChangeDutyCycle(g)
pwm_blue.ChangeDutyCycle(b)
# 蜂鸣器控制
def beep(freq=440, duration=0.1):
buzzer.ChangeFrequency(freq)
buzzer.ChangeDutyCycle(50)
time.sleep(duration)
buzzer.ChangeDutyCycle(0)
# 播放声音
def play_sound():
try:
sound.play()
except:
beep(880, 0.5)
# 读取环境数据
def read_environment():
humidity, temperature = Adafruit_DHT.read_retry(dht_sensor, DHT_PIN)
return temperature, humidity
# 自动避障模式
def avoid_obstacle_mode():
set_rgb(0, 0, 100) # 蓝色表示避障模式
while True:
left_ir = GPIO.input(IR_LEFT)
right_ir = GPIO.input(IR_RIGHT)
if not left_ir and not right_ir: # 前方无障碍
forward()
elif not left_ir and right_ir: # 右侧有障碍
left()
time.sleep(0.5)
elif left_ir and not right_ir: # 左侧有障碍
right()
time.sleep(0.5)
else: # 前方有障碍
backward()
time.sleep(0.5)
right()
time.sleep(1)
time.sleep(0.1)
# 巡线模式
def line_follow_mode():
set_rgb(0, 100, 0) # 绿色表示巡线模式
while True:
left_gray = GPIO.input(GRAY_LEFT)
right_gray = GPIO.input(GRAY_RIGHT)
if not left_gray and not right_gray: # 在线条上
forward()
elif not left_gray and right_gray: # 偏右
left()
elif left_gray and not right_gray: # 偏左
right()
else: # 丢失线条
stop()
beep()
time.sleep(0.5)
time.sleep(0.1)
# 显示环境数据
def display_environment():
while True:
temp, humi = read_environment()
gui.clear() # 清空屏幕
gui.draw_text(f"温度: {temp}°C", x=120, y=50, font_size=20)
gui.draw_text(f"湿度: {humi}%", x=120, y=80, font_size=20)
time.sleep(2)
# 主控制函数
def main():
# 创建UI按钮
btn_avoid = gui.add_button(x=50, y=150, text="避障模式", onclick=lambda: start_mode(avoid_obstacle_mode))
btn_line = gui.add_button(x=150, y=150, text="巡线模式", onclick=lambda: start_mode(line_follow_mode))
btn_stop = gui.add_button(x=100, y=200, text="停止", onclick=stop)
btn_sound = gui.add_button(x=100, y=250, text="播放声音", onclick=play_sound)
# 显示初始信息
gui.draw_text("智能机器人小车", x=120, y=20, font_size=24)
# 启动环境数据显示线程
env_thread = Thread(target=display_environment)
env_thread.daemon = True
env_thread.start()
# 初始灯光效果
for i in range(3):
set_rgb(100, 0, 0)
time.sleep(0.2)
set_rgb(0, 100, 0)
time.sleep(0.2)
set_rgb(0, 0, 100)
time.sleep(0.2)
set_rgb(0, 0, 0)
def start_mode(mode_func):
mode_thread = Thread(target=mode_func)
mode_thread.daemon = True
mode_thread.start()
if __name__ == "__main__":
try:
main()
while True:
time.sleep(1)
except KeyboardInterrupt:
stop()
GPIO.cleanup()
功能说明
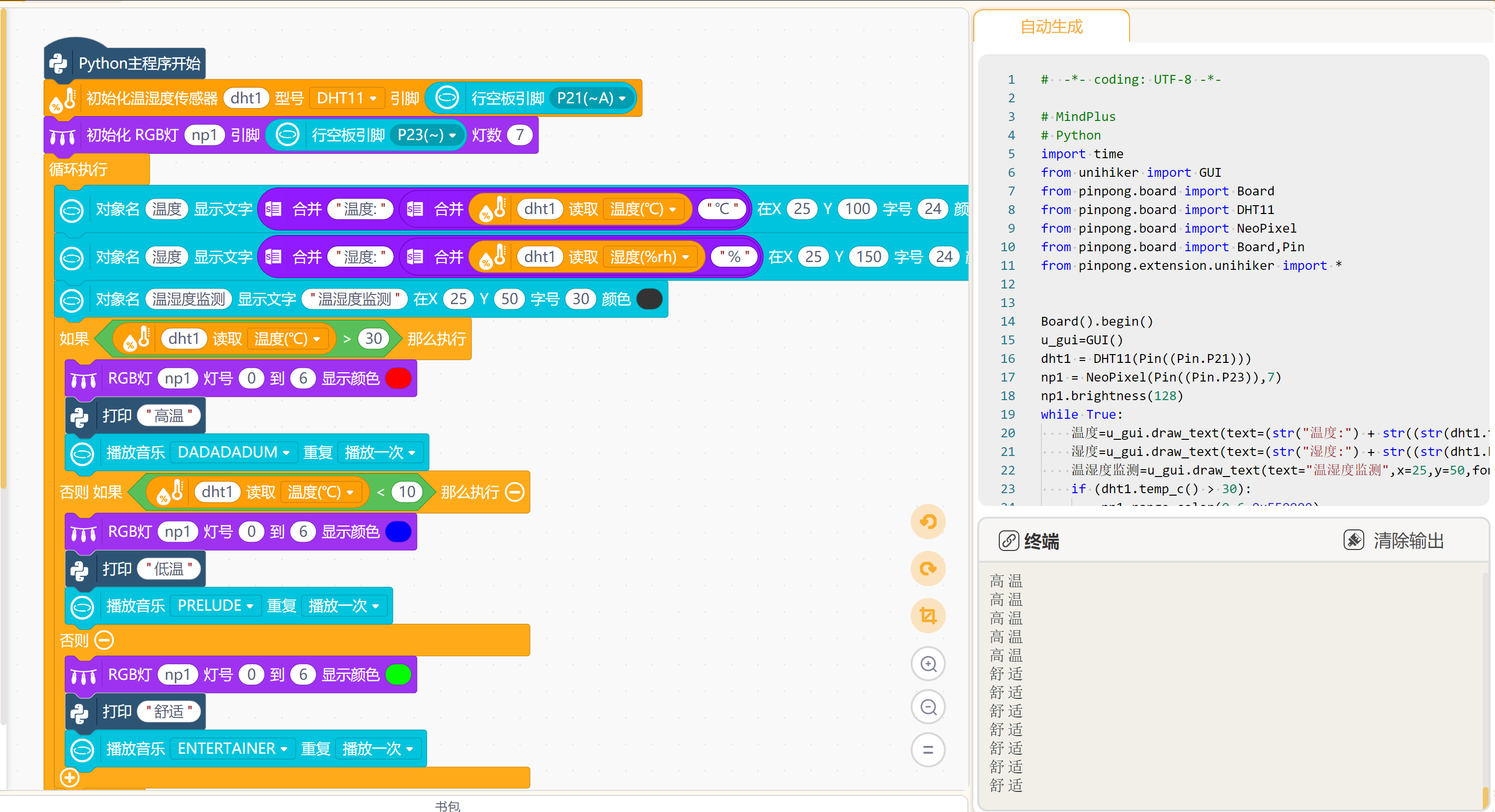
1.环境监测:
使用DHT11传感器实时监测温度和湿度
在屏幕上显示环境数据
import time
import Adafruit_DHT
from unihiker import GUI # 导入行空板GUI库
# 初始化
gui = GUI() # 创建GUI对象
dht_sensor = Adafruit_DHT.DHT11 # 传感器类型
dht_pin = 10 # 传感器连接的GPIO引脚(行空板P10)
# 创建显示文本
temp_text = gui.draw_text(text="温度: -- °C", x=120, y=100, font_size=24, color="#FF0000")
humi_text = gui.draw_text(text="湿度: -- %", x=120, y=150, font_size=24, color="#0000FF")
title = gui.draw_text(text="温湿度监测", x=120, y=50, font_size=30, color="#333333")
# 添加装饰线
gui.draw_line(x1=50, y1=80, x2=190, y2=80, width=2, color="#CCCCCC")
def update_sensor_data():
while True:
# 读取温湿度数据
humidity, temperature = Adafruit_DHT.read_retry(dht_sensor, dht_pin)
if humidity is not None and temperature is not None:
# 更新显示文本
temp_text.config(text=f"温度: {temperature}°C")
humi_text.config(text=f"湿度: {humidity}%")
# 根据温度改变颜色提示
if temperature > 30:
temp_text.config(color="#FF0000") # 高温红色
elif temperature < 10:
temp_text.config(color="#0000FF") # 低温蓝色
else:
temp_text.config(color="#00AA00") # 舒适绿色
else:
temp_text.config(text="温度: 读取失败")
humi_text.config(text="湿度: 读取失败")
time.sleep(2) # 每2秒更新一次
# 启动程序
try:
update_sensor_data()
except KeyboardInterrupt:
gui.clear() # 清空屏幕
print("程序已停止")
2.运动控制:
前进、后退、左转、右转、停止功能
两种自动模式:避障模式和巡线模式
3.避障功能:
使用红外传感器检测障碍物
自动避开障碍物
4.巡线功能:
使用灰度传感器检测地面线条
自动沿着线条行驶
5.声光提示:
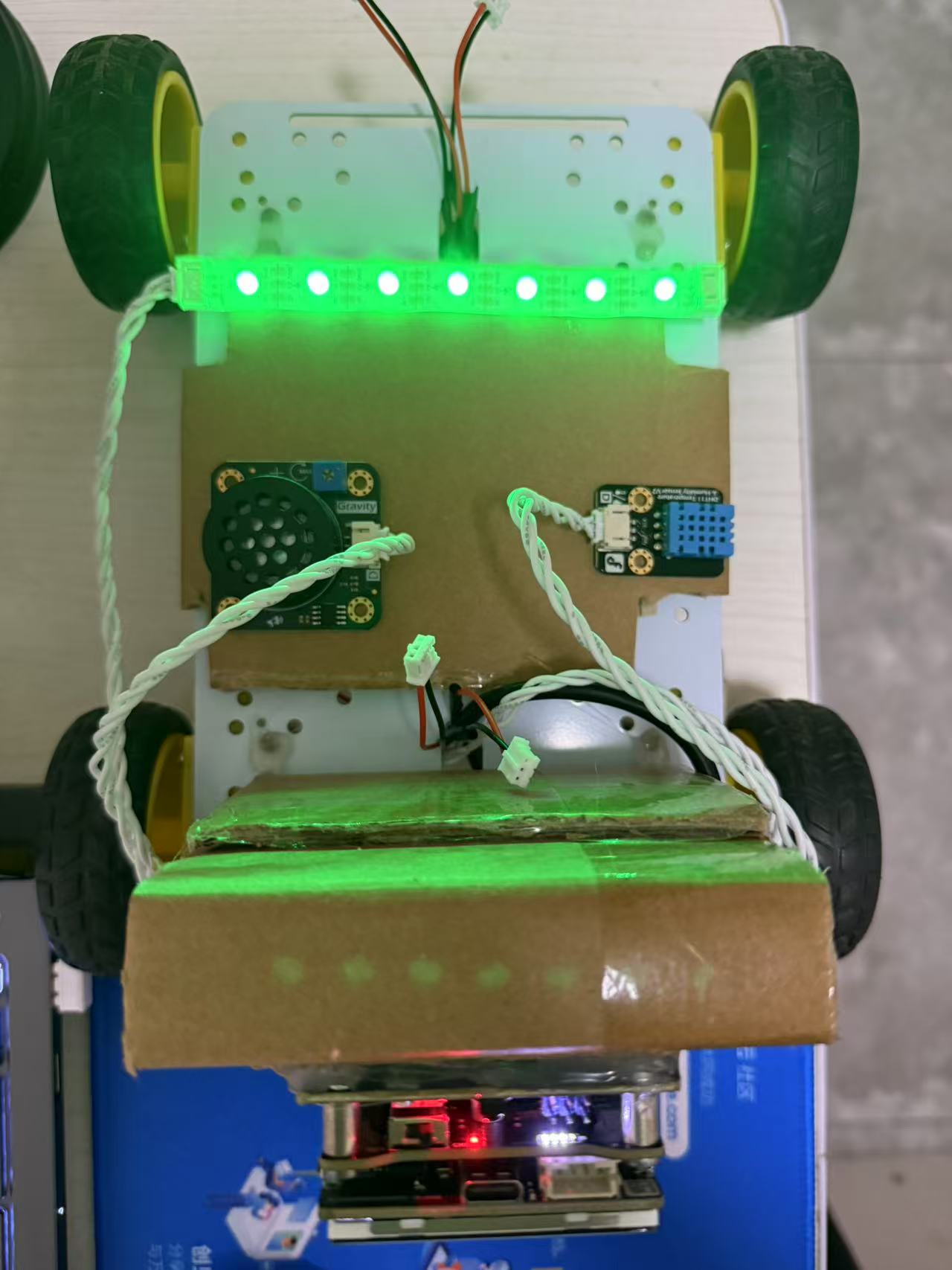
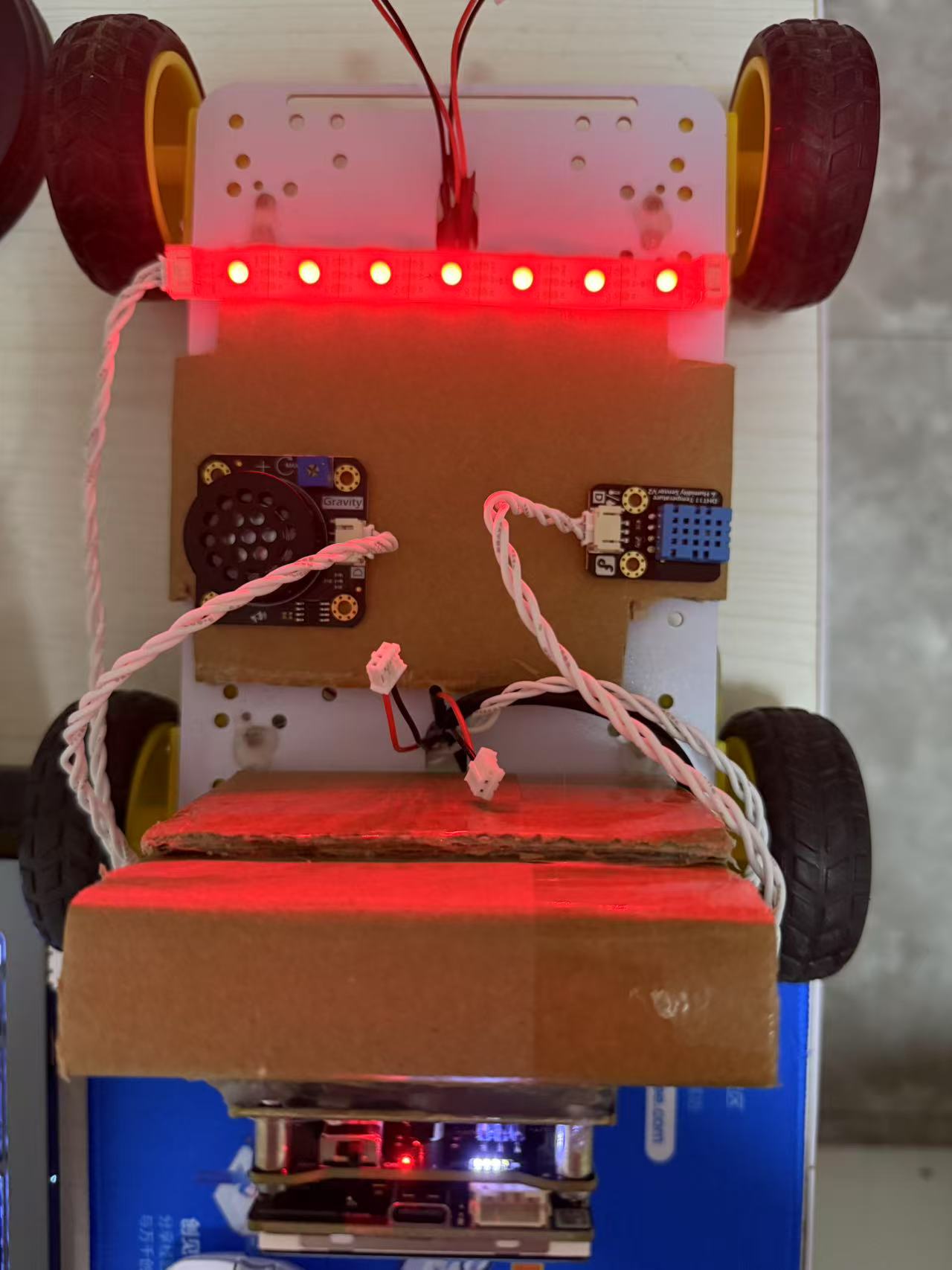
RGB LED灯显示不同模式(蓝色-避障,绿色-巡线)
蜂鸣器发出提示音
支持播放音频文件
6.用户界面:
屏幕显示状态信息
触摸按钮控制模式切换
扩展建议
设计模型图

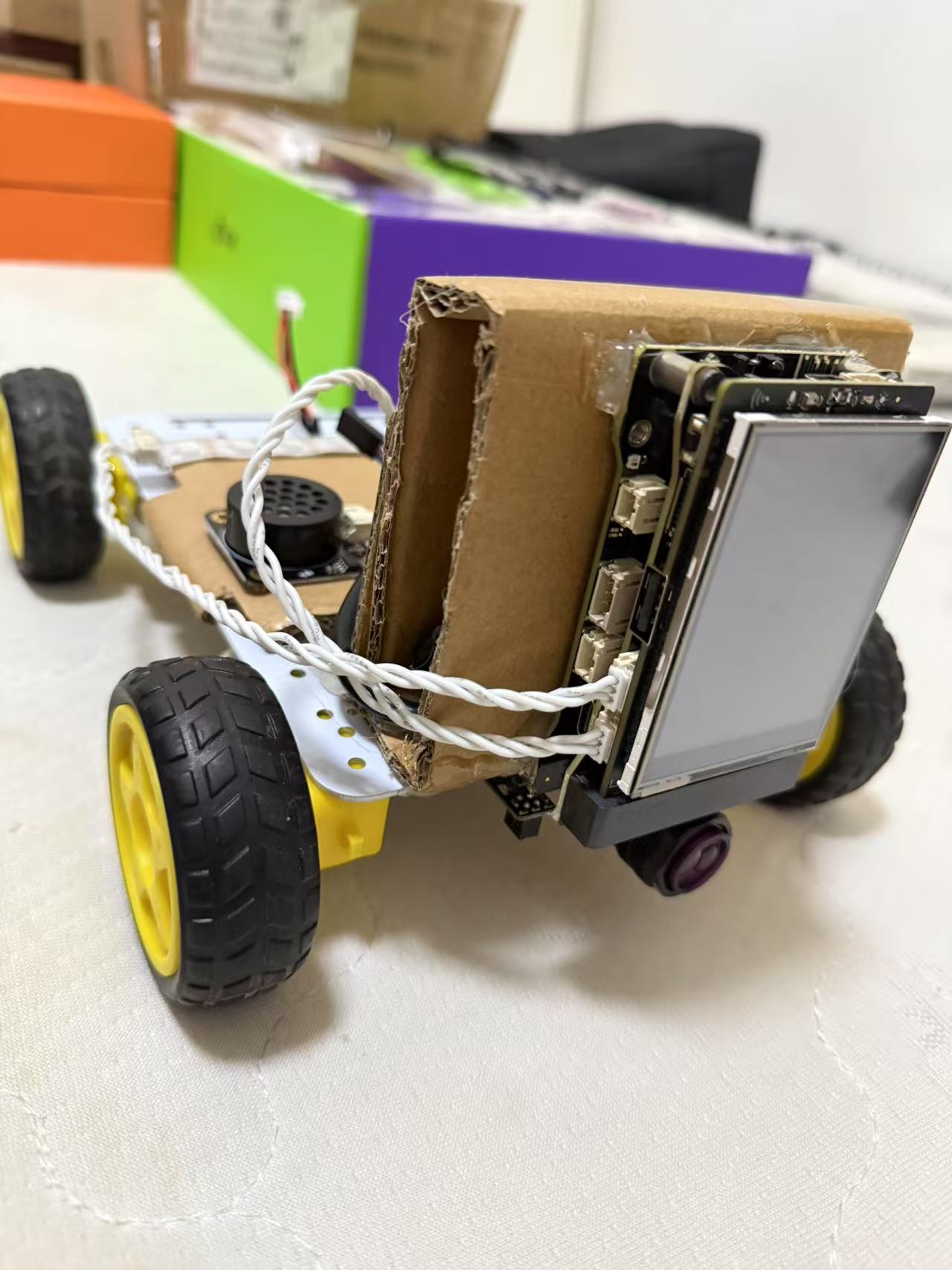

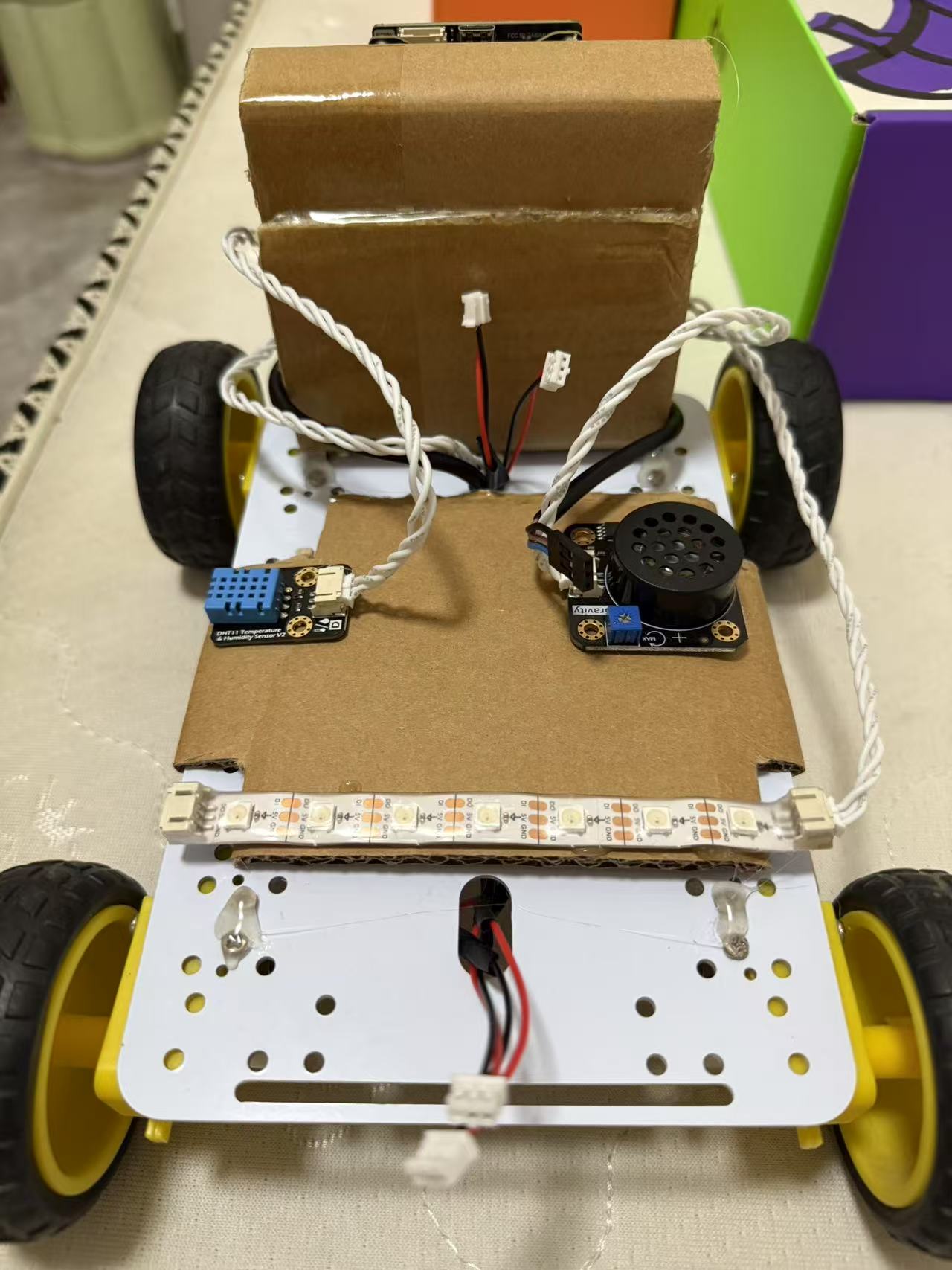
调试图片
舒适温度
高温显示

调试过程

扩展建议
1.可以添加更多传感器,如超声波传感器提高避障精度
2.增加无线控制功能,通过手机APP控制
3.添加摄像头实现视觉识别功能
4.记录环境数据并保存到文件或上传到云端
import time
import RPi.GPIO as GPIO
from unihiker import GUI
import Adafruit_DHT
import pygame
from threading import Thread
# 初始化GUI
gui = GUI()
# 引脚定义
DHT_PIN = 10 # 温湿度传感器
BUZZER_PIN = 11 # 蜂鸣器
RGB_RED = 12 # RGB红灯
RGB_GREEN = 13 # RGB绿灯
RGB_BLUE = 14 # RGB蓝灯
GRAY_LEFT = 15 # 左侧灰度传感器
GRAY_RIGHT = 16 # 右侧灰度传感器
IR_LEFT = 17 # 左侧红外避障
IR_RIGHT = 18 # 右侧红外避障
MOTOR_A1 = 19 # 电机A正极
MOTOR_A2 = 20 # 电机A负极
MOTOR_B1 = 21 # 电机B正极
MOTOR_B2 = 22 # 电机B负极
# 初始化GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(BUZZER_PIN, GPIO.OUT)
GPIO.setup(RGB_RED, GPIO.OUT)
GPIO.setup(RGB_GREEN, GPIO.OUT)
GPIO.setup(RGB_BLUE, GPIO.OUT)
GPIO.setup(GRAY_LEFT, GPIO.IN)
GPIO.setup(GRAY_RIGHT, GPIO.IN)
GPIO.setup(IR_LEFT, GPIO.IN)
GPIO.setup(IR_RIGHT, GPIO.IN)
GPIO.setup(MOTOR_A1, GPIO.OUT)
GPIO.setup(MOTOR_A2, GPIO.OUT)
GPIO.setup(MOTOR_B1, GPIO.OUT)
GPIO.setup(MOTOR_B2, GPIO.OUT)
# 初始化PWM
pwm_red = GPIO.PWM(RGB_RED, 1000)
pwm_green = GPIO.PWM(RGB_GREEN, 1000)
pwm_blue = GPIO.PWM(RGB_BLUE, 1000)
pwm_red.start(0)
pwm_green.start(0)
pwm_blue.start(0)
# 初始化蜂鸣器
buzzer = GPIO.PWM(BUZZER_PIN, 440)
buzzer.start(0)
# 初始化DHT11传感器
dht_sensor = Adafruit_DHT.DHT11
# 初始化pygame音频
pygame.mixer.init()
try:
sound = pygame.mixer.Sound("alert.wav") # 准备一个音频文件
except:
print("未找到音频文件")
# 电机控制函数
def motor_control(a1, a2, b1, b2):
GPIO.output(MOTOR_A1, a1)
GPIO.output(MOTOR_A2, a2)
GPIO.output(MOTOR_B1, b1)
GPIO.output(MOTOR_B2, b2)
def forward():
motor_control(1, 0, 1, 0)
def backward():
motor_control(0, 1, 0, 1)
def left():
motor_control(0, 1, 1, 0)
def right():
motor_control(1, 0, 0, 1)
def stop():
motor_control(0, 0, 0, 0)
# RGB灯控制
def set_rgb(r, g, b):
pwm_red.ChangeDutyCycle(r)
pwm_green.ChangeDutyCycle(g)
pwm_blue.ChangeDutyCycle(b)
# 蜂鸣器控制
def beep(freq=440, duration=0.1):
buzzer.ChangeFrequency(freq)
buzzer.ChangeDutyCycle(50)
time.sleep(duration)
buzzer.ChangeDutyCycle(0)
# 播放声音
def play_sound():
try:
sound.play()
except:
beep(880, 0.5)
# 读取环境数据
def read_environment():
humidity, temperature = Adafruit_DHT.read_retry(dht_sensor, DHT_PIN)
return temperature, humidity
# 自动避障模式
def avoid_obstacle_mode():
set_rgb(0, 0, 100) # 蓝色表示避障模式
while True:
left_ir = GPIO.input(IR_LEFT)
right_ir = GPIO.input(IR_RIGHT)
if not left_ir and not right_ir: # 前方无障碍
forward()
elif not left_ir and right_ir: # 右侧有障碍
left()
time.sleep(0.5)
elif left_ir and not right_ir: # 左侧有障碍
right()
time.sleep(0.5)
else: # 前方有障碍
backward()
time.sleep(0.5)
right()
time.sleep(1)
time.sleep(0.1)
# 巡线模式
def line_follow_mode():
set_rgb(0, 100, 0) # 绿色表示巡线模式
while True:
left_gray = GPIO.input(GRAY_LEFT)
right_gray = GPIO.input(GRAY_RIGHT)
if not left_gray and not right_gray: # 在线条上
forward()
elif not left_gray and right_gray: # 偏右
left()
elif left_gray and not right_gray: # 偏左
right()
else: # 丢失线条
stop()
beep()
time.sleep(0.5)
time.sleep(0.1)
# 显示环境数据
def display_environment():
while True:
temp, humi = read_environment()
gui.clear() # 清空屏幕
gui.draw_text(f"温度: {temp}°C", x=120, y=50, font_size=20)
gui.draw_text(f"湿度: {humi}%", x=120, y=80, font_size=20)
time.sleep(2)
# 主控制函数
def main():
# 创建UI按钮
btn_avoid = gui.add_button(x=50, y=150, text="避障模式", onclick=lambda: start_mode(avoid_obstacle_mode))
btn_line = gui.add_button(x=150, y=150, text="巡线模式", onclick=lambda: start_mode(line_follow_mode))
btn_stop = gui.add_button(x=100, y=200, text="停止", onclick=stop)
btn_sound = gui.add_button(x=100, y=250, text="播放声音", onclick=play_sound)
# 显示初始信息
gui.draw_text("智能机器人小车", x=120, y=20, font_size=24)
# 启动环境数据显示线程
env_thread = Thread(target=display_environment)
env_thread.daemon = True
env_thread.start()
# 初始灯光效果
for i in range(3):
set_rgb(100, 0, 0)
time.sleep(0.2)
set_rgb(0, 100, 0)
time.sleep(0.2)
set_rgb(0, 0, 100)
time.sleep(0.2)
set_rgb(0, 0, 0)
def start_mode(mode_func):
mode_thread = Thread(target=mode_func)
mode_thread.daemon = True
mode_thread.start()
if __name__ == "__main__":
try:
main()
while True:
time.sleep(1)
except KeyboardInterrupt:
stop()
GPIO.cleanup()



 他的勋章
他的勋章


评论