 返回首页
返回首页
 回到顶部
回到顶部

【项目来源】
B站大佬“剑客范十三”做了个手搓20米体感机械拳,观之后感觉到十分震撼,正好又赶上DF“造物记”在做“轻装”上阵,“无线”可能!行空板M10扩展组合应用创作赛活动,于是决定将体感机械拳进行简单的“复刻”,毕竟我目前还做不了那么大。
【项目简介】
整个作品包括两块,体感控制端和机械拳端。体感控制端装配一块行空板+电池拓展板,机械拳端,以一辆DIY小车的行驶出现,车头前配置3D打印的拳头模型。通过体感控制端发送指令,从而实现控制小车运动。本次作品功能上较为简单,但采用模块化设计,为后学功能增加提供了无线可能。
【项目目标】
体感控制端:发送控制指令;播放怀旧音乐;灯光效果显示
铁拳小车端:发送控制指令;播放怀旧音乐;灯光效果显示
【所需硬件】
序号 | 名 称 | 数 量 |
1 | 行空板 | 2 |
2 | 行空板M10电池扩展板 | 2 |
3 | 行空板IO拓展板 | 1 |
4 | 3W迷你音频立体声放大器 | 1 |
5 | 扬声器 | 2 |
6 | RGB灯带 | 2 |
7 | N20电机 | 2 |
8 | 轮胎 | 2 |
【制作过程】
主控安装:

拆开行空板主控、电池拓展板、IO拓展板
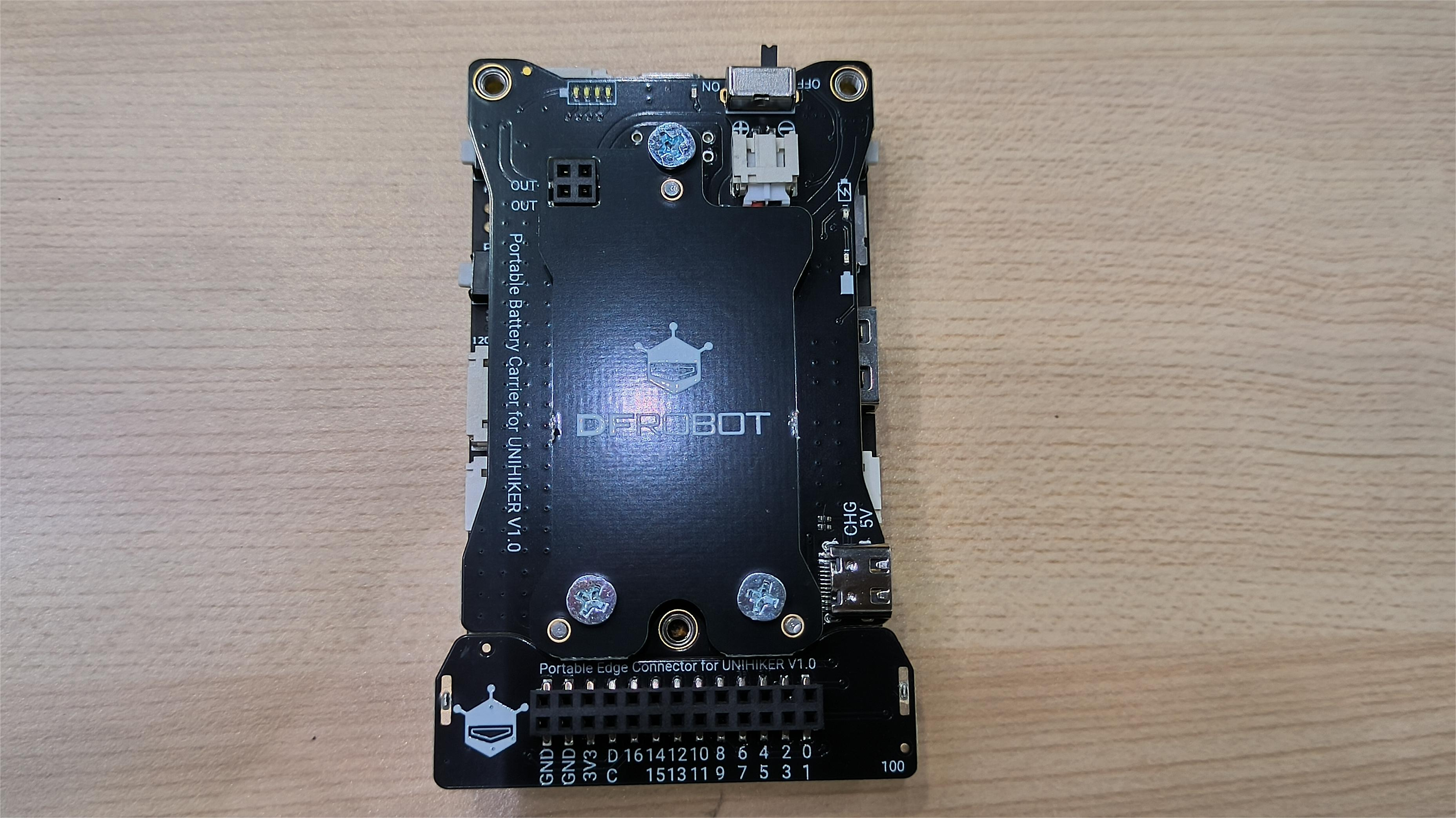
将电池拓展板用螺丝固定在行空板主控背面

将行空板IO拓展板进行叠加安装
体感控制端:
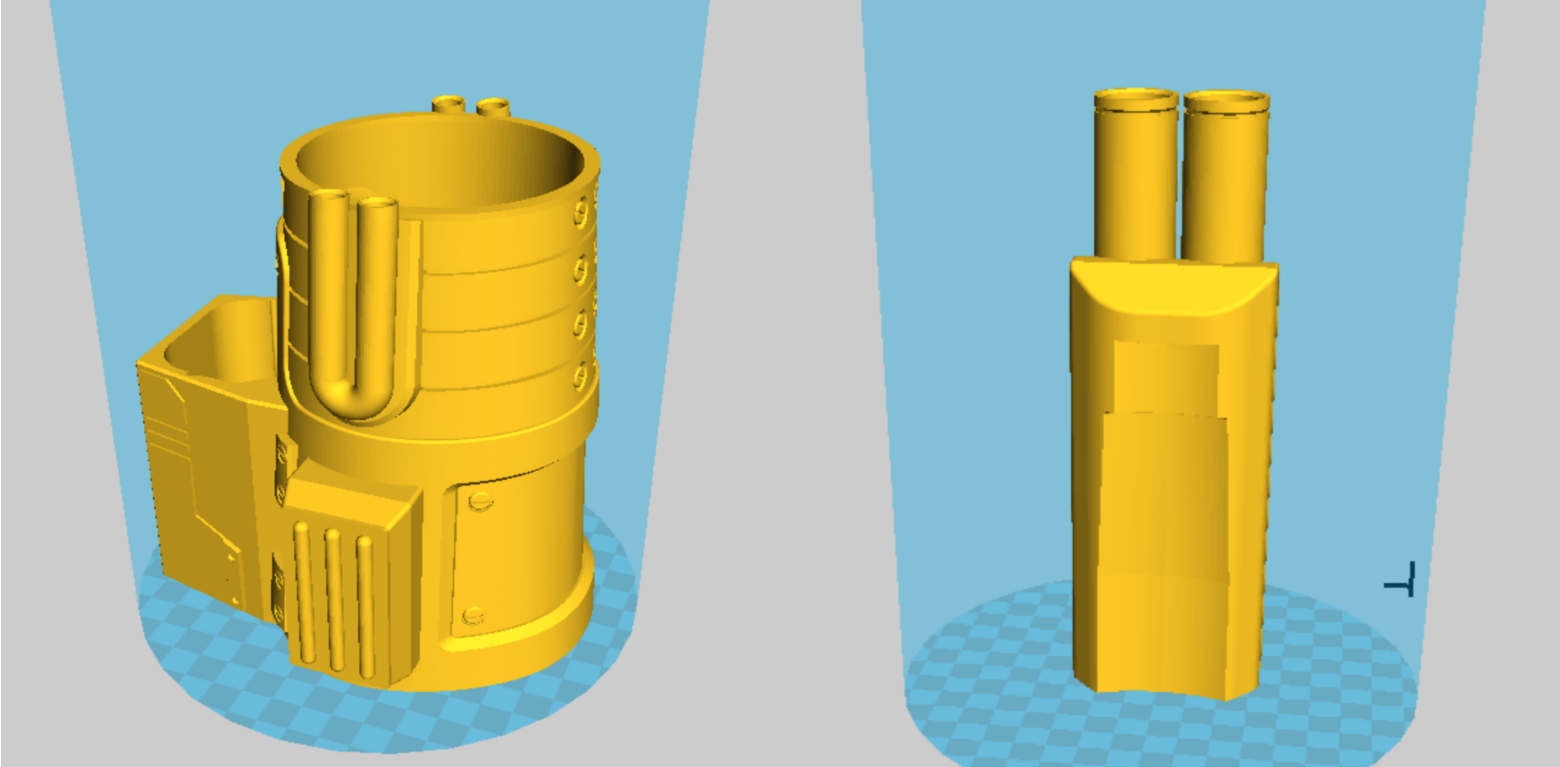
结构件部分:从Thingives下载相应模型文件(https://www.thingiverse.com/thing:3379643)进行打印。模型切片如下,分别打印出体感控制端的两个模型文件。
安装电子件:
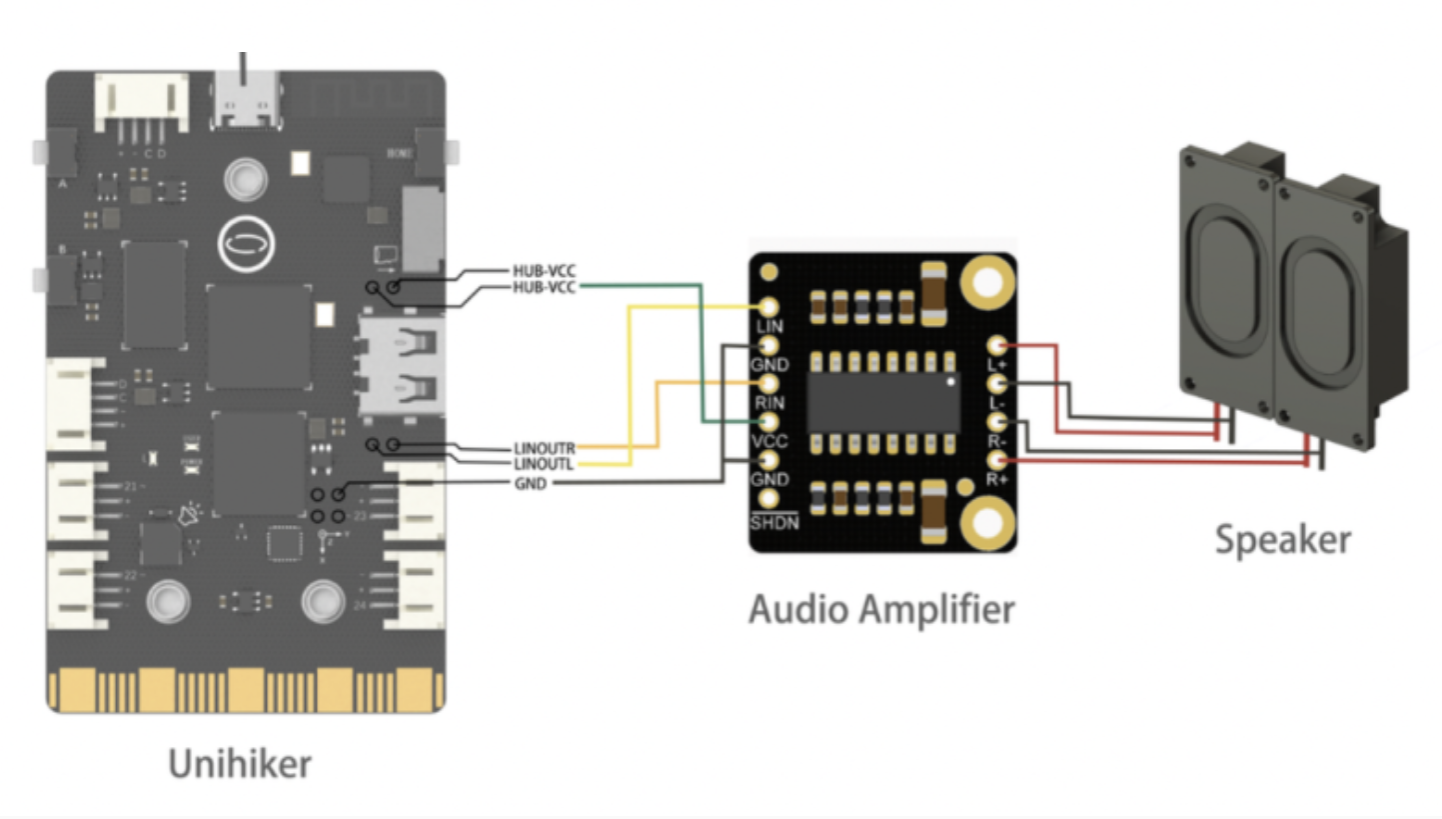
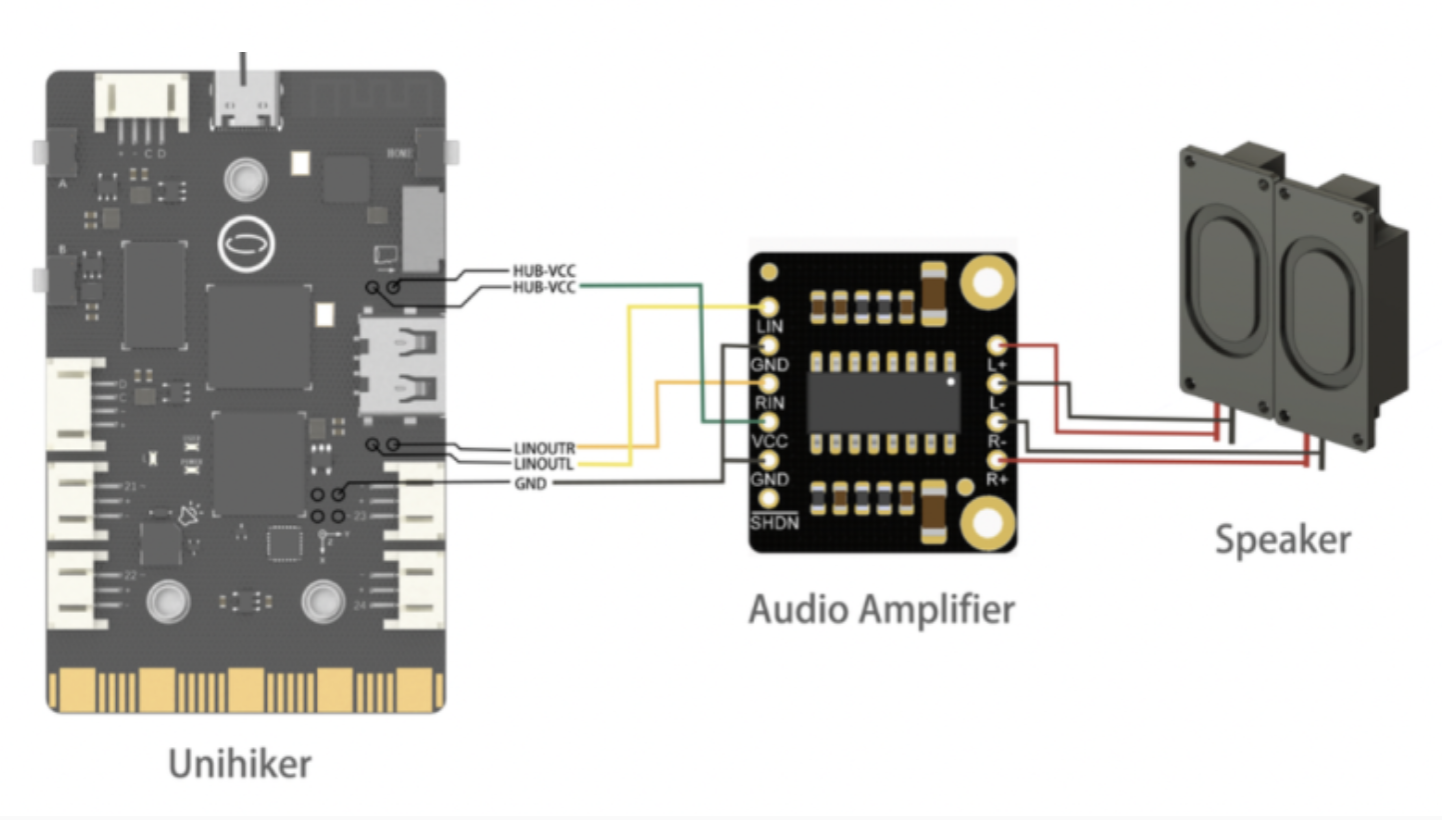
为了让体感控制端不这么千头万绪,我采用3W的音频放大器来连接两个喇叭,具体电路连线如下图所示。
打印出体感控制端结构件,在筒壁两侧粘贴灯带。
在机构件适当位置掏出孔位(前面是用激光切割来切了一部分,无奈时间太长,切的不够透彻,最终放弃用烙铁去掏空,结果如下)

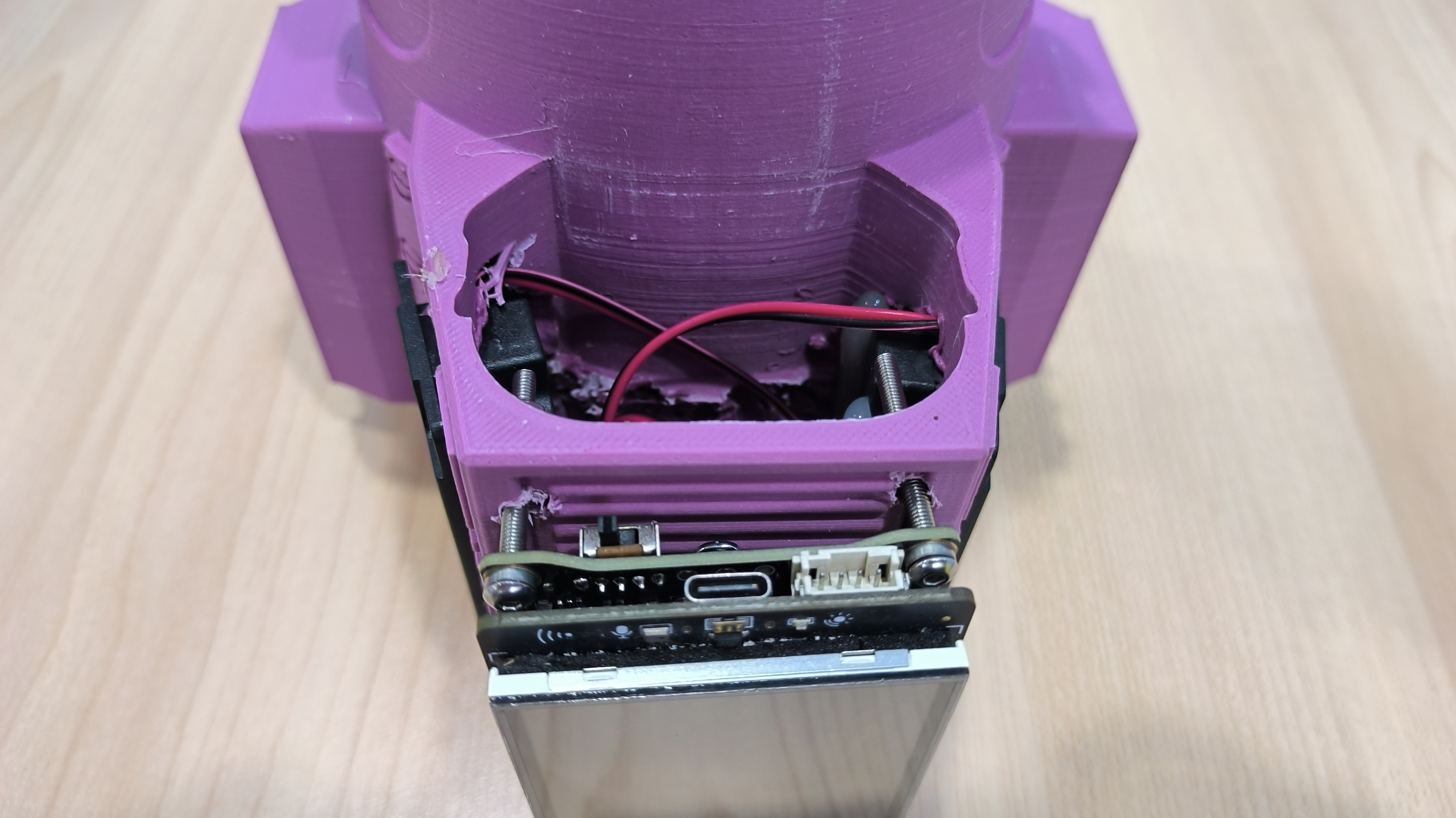
将两部结构组装RGB灯带分别接入21,23口。

为了缅怀我们逝去的青春,我在体感控制端启动时,加载了圣斗士星矢的一段歌曲,并配上几个主角的绝招画面。例如,下图紫龙庐山升龙霸。

星矢的天马流星拳

一辉的凤翼天翔

模拟出拳的画面显示


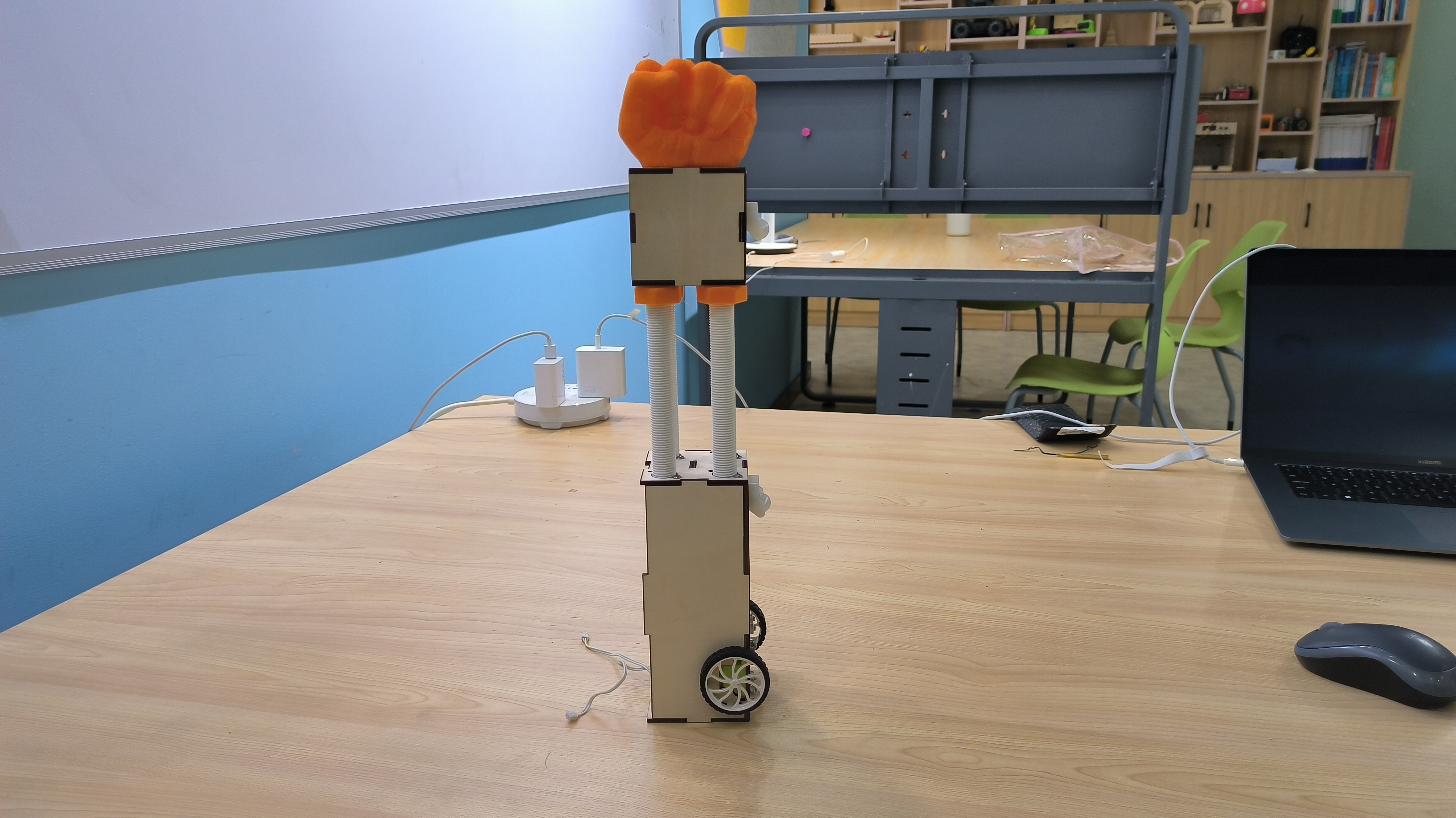
体感小车端,采用模块化设计,分为三部分:车头(拳头)部分可替换;连接赶用3D打印及螺母可调整长度;车体部分,电机主控集中于此,并可继续升级(目前只用了两个电机)
拳头部分:
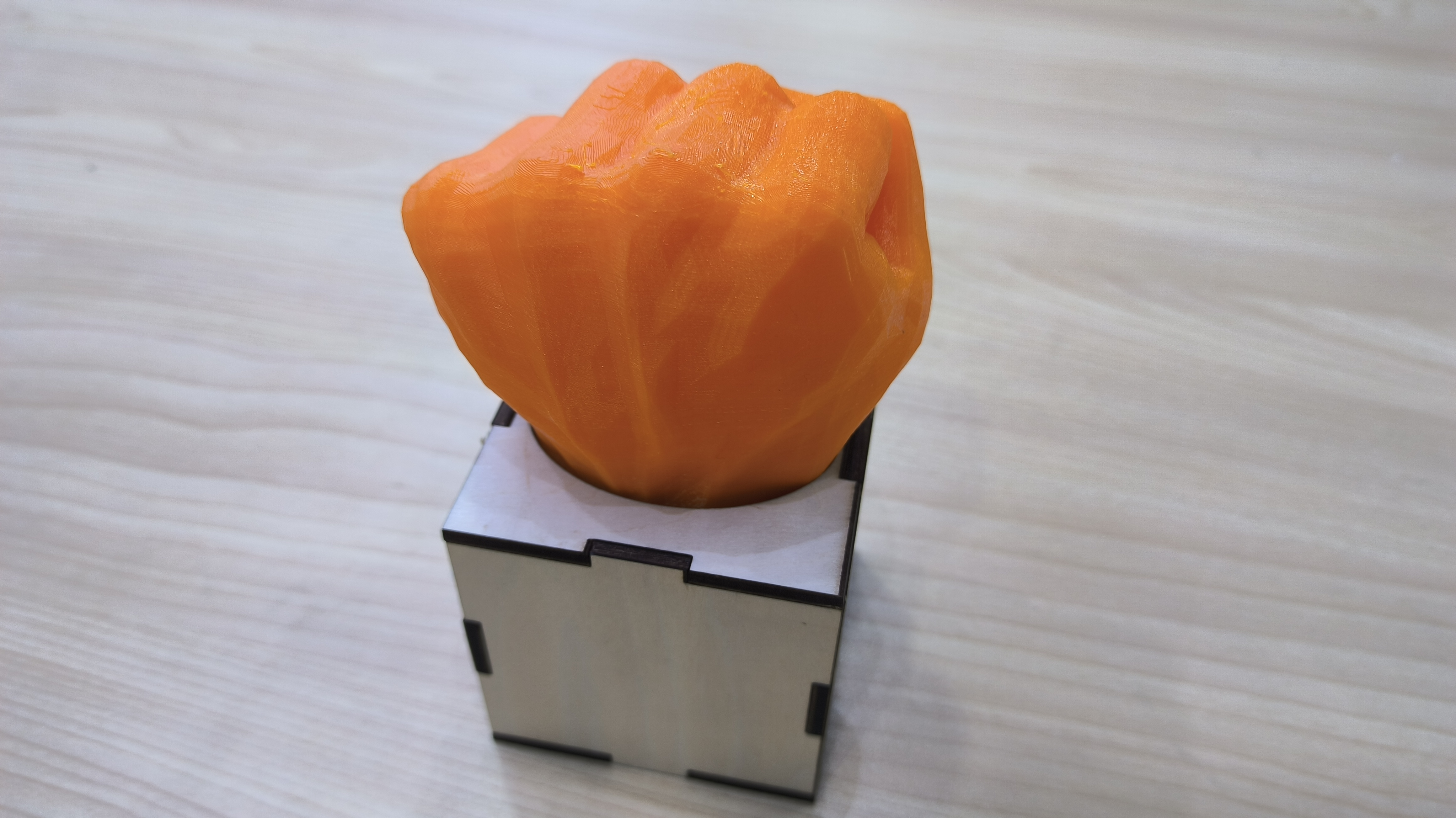
安装3D打印拳头到车头部分上

安装万向轮到车体底部
组装完成后整体效果
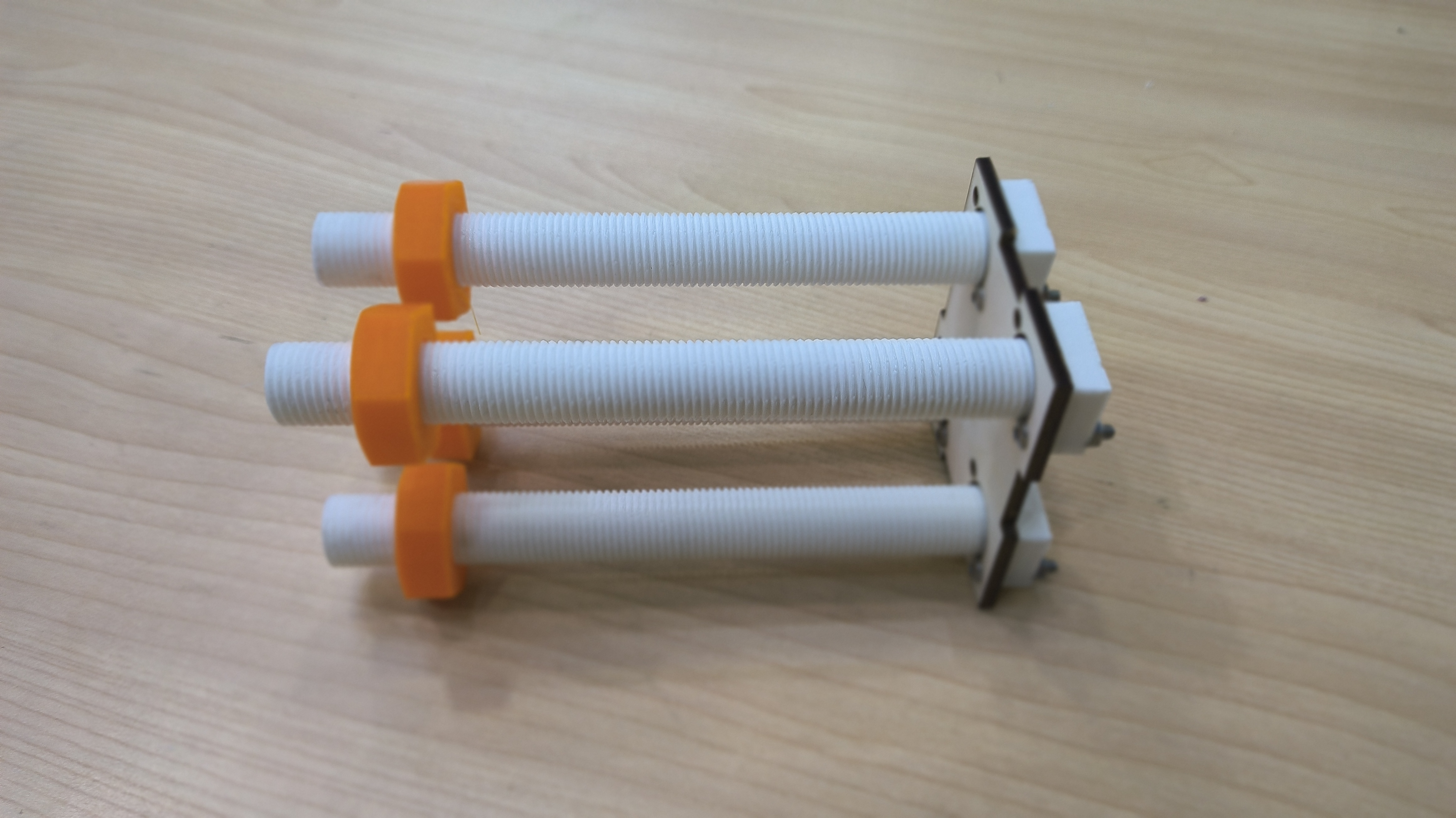
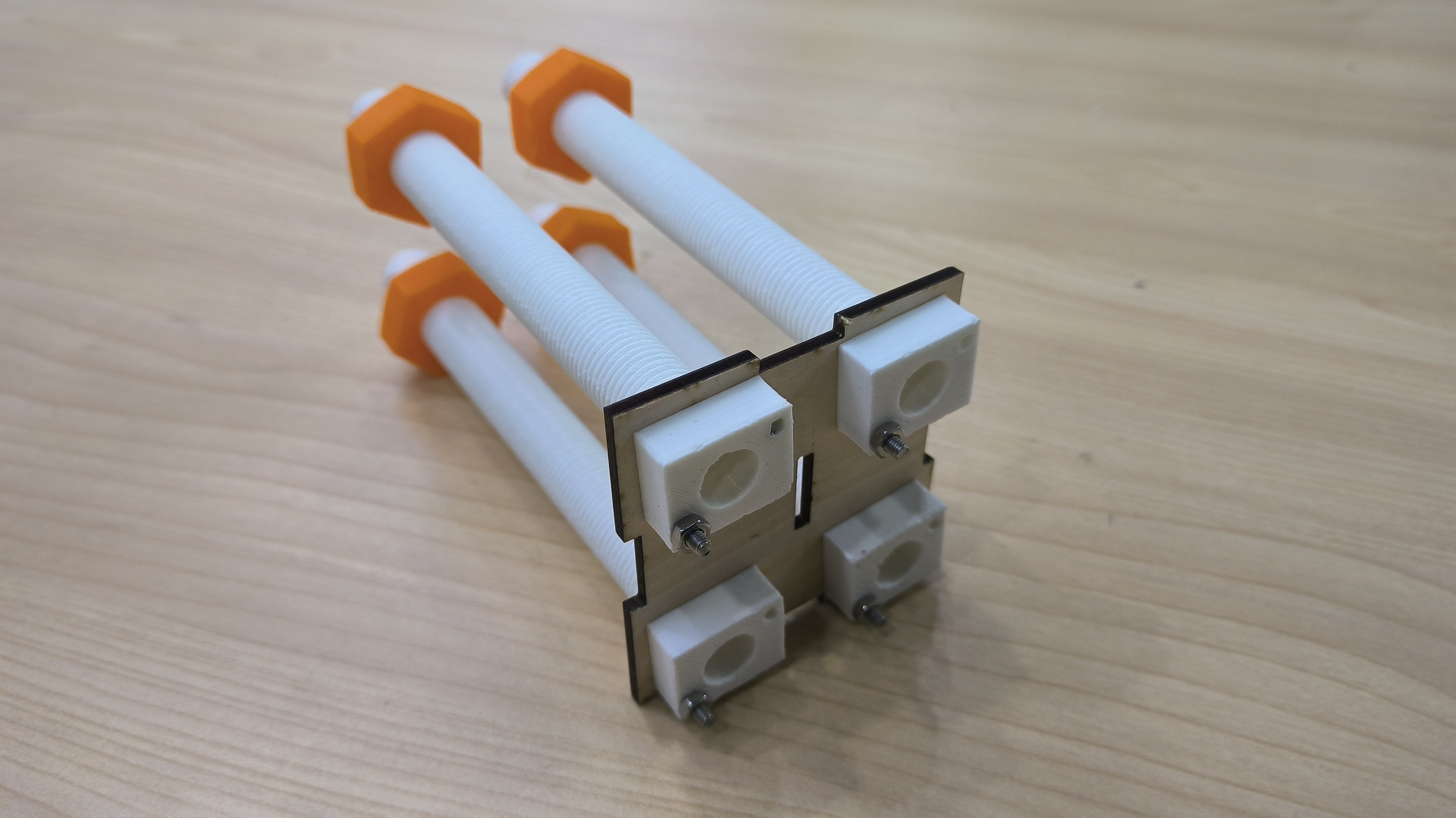
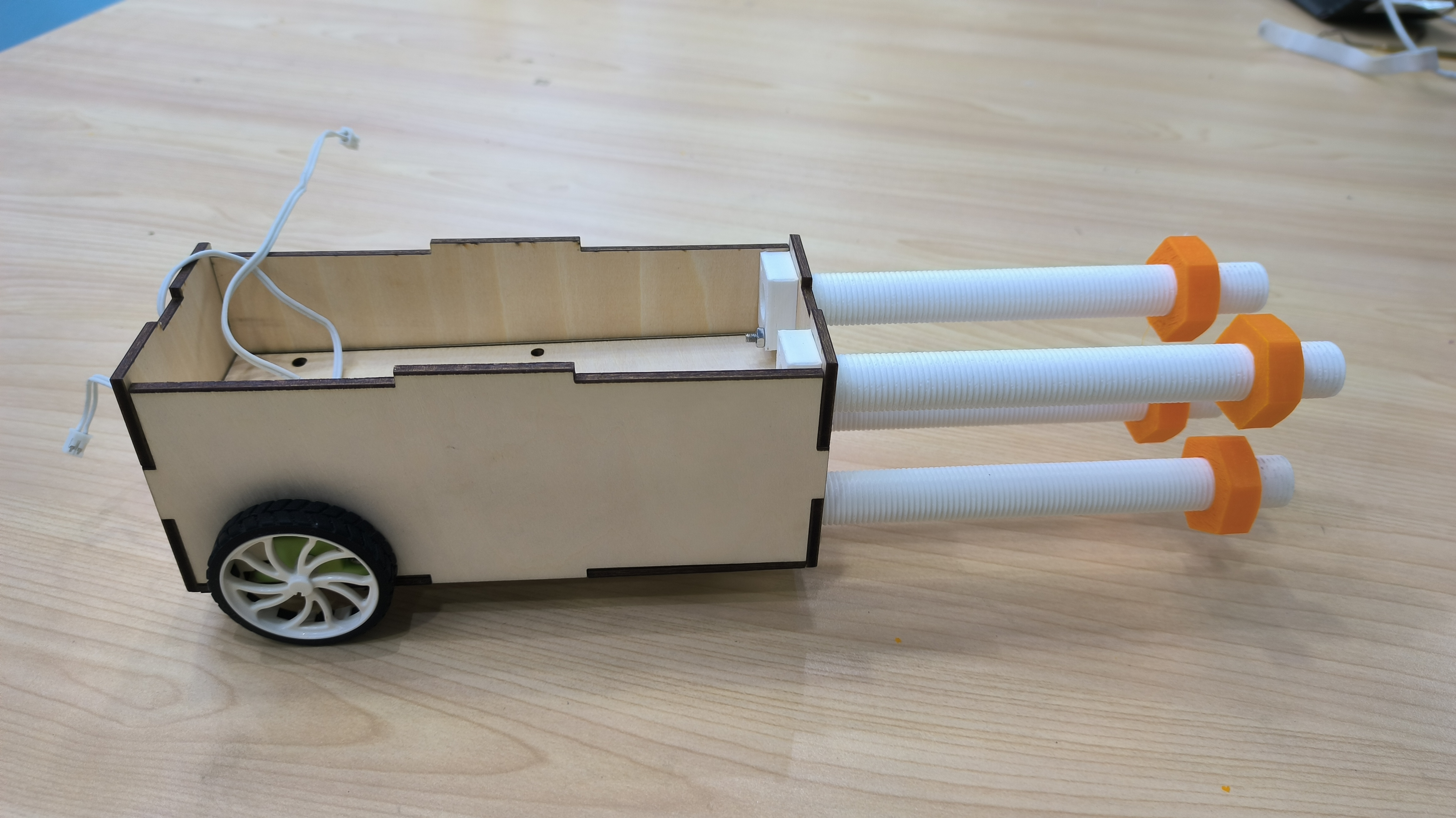
连接杆部分通过Fusion设计出丝杆和螺母用于连接车头和车体,同时也可以调整两者之间的距离。
打印出丝杆和螺母与车体前面板组合安装,并用螺丝固定其中一端。

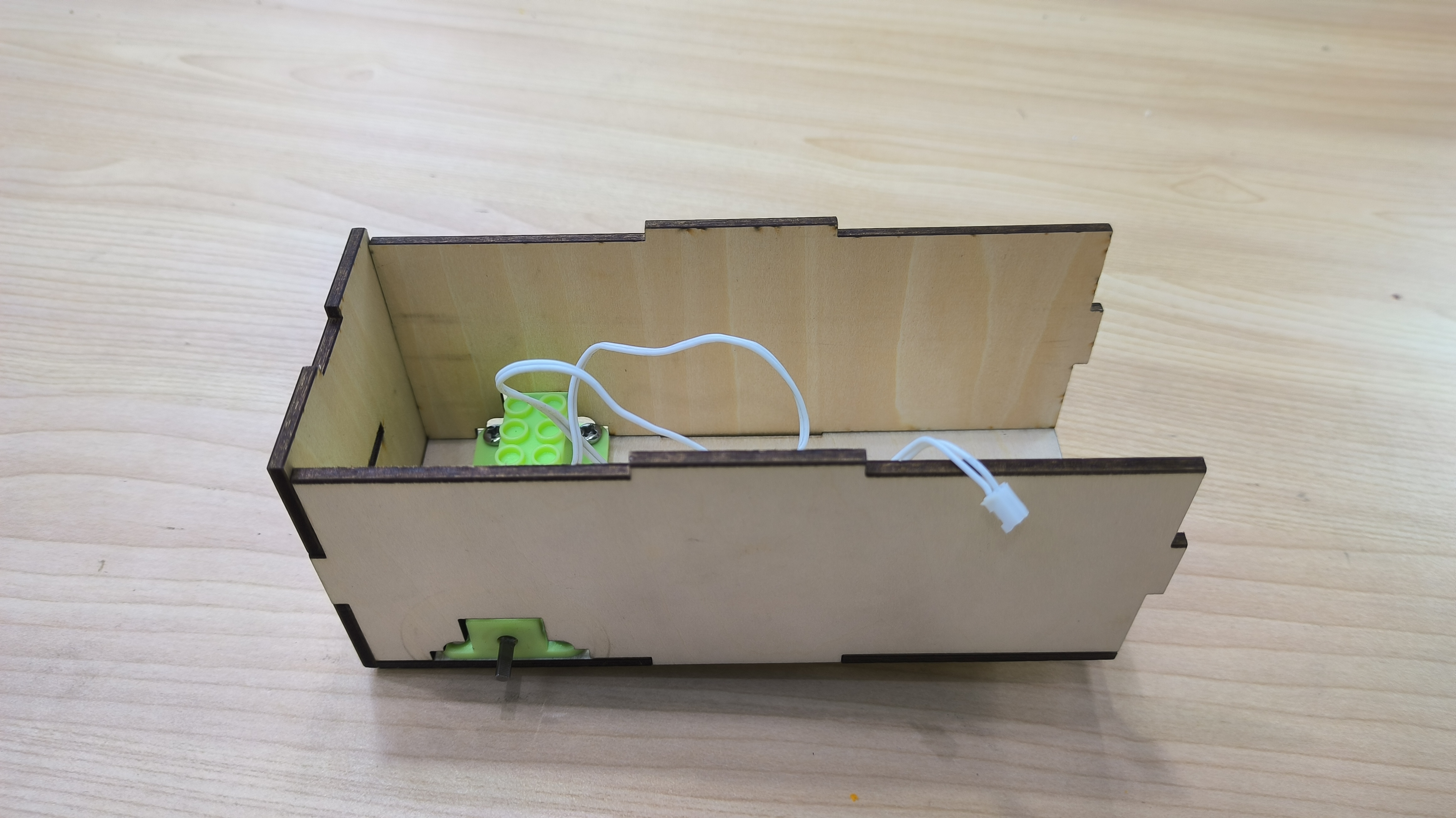
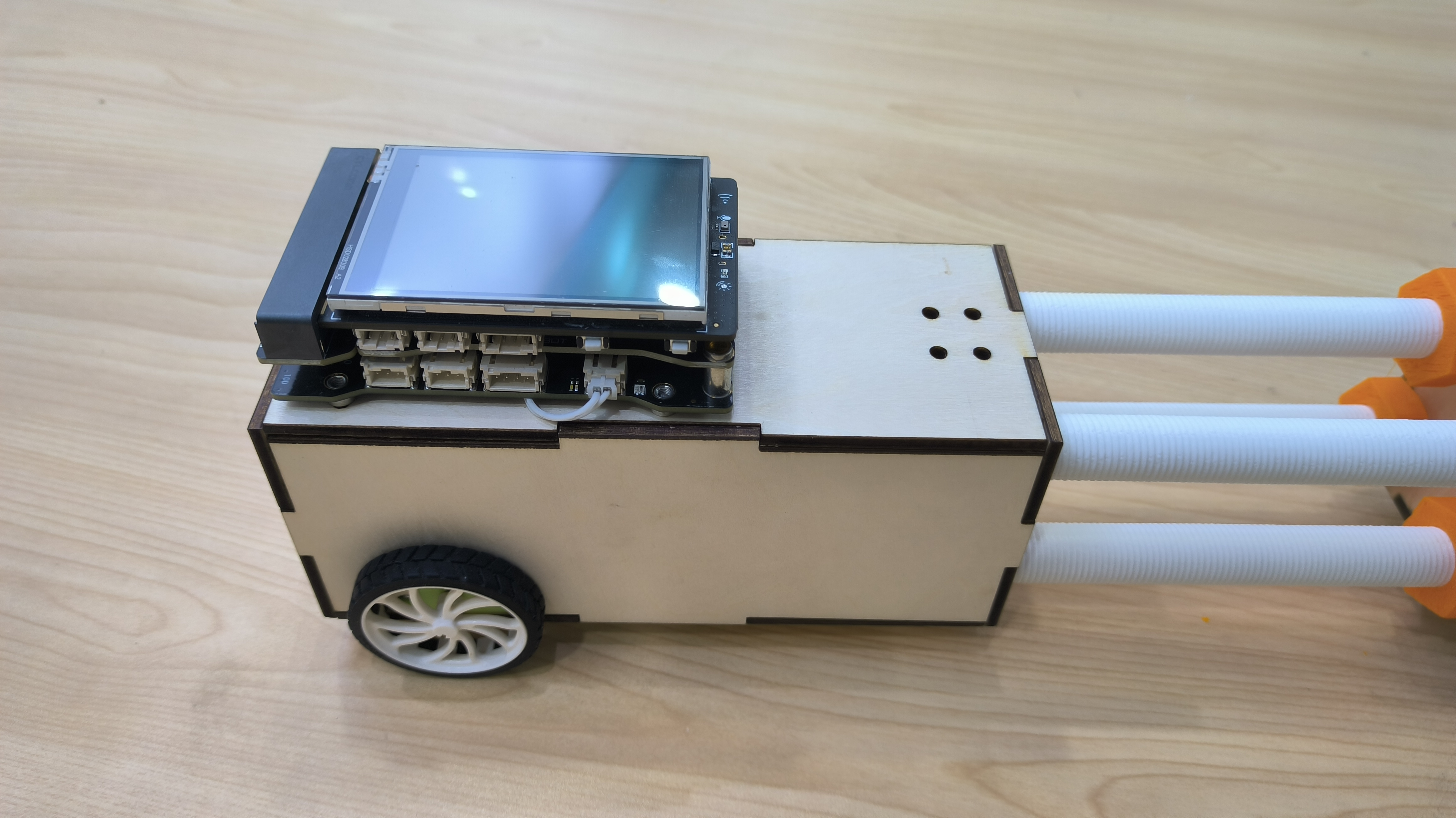
小车机动部分
在小车底板部分安装两个N20电机,手头正好有BOSON套件中的电机就顺手拿来用了。
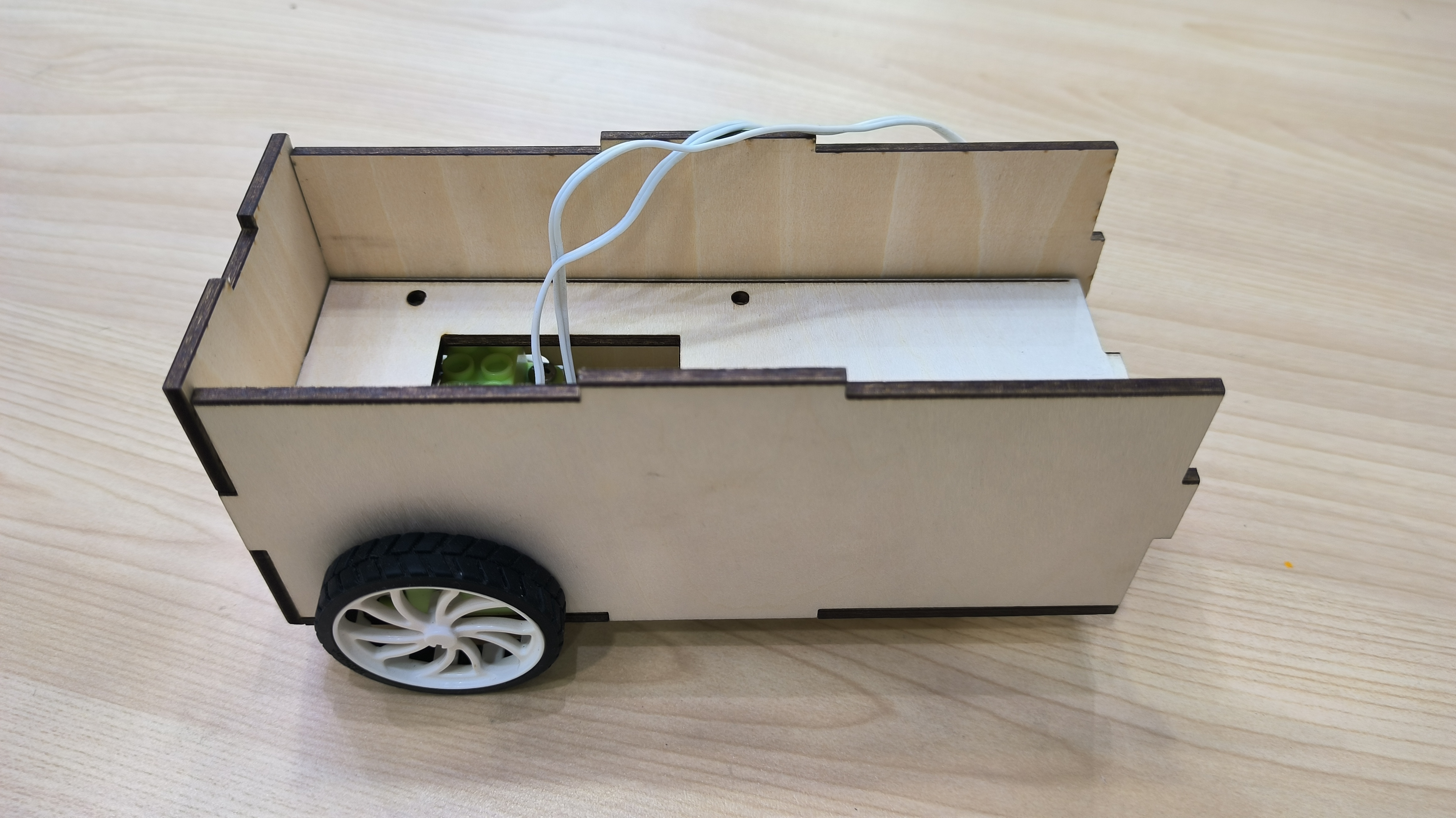
安装车体左右及后面板
安装车轮

安装车体加强板,并整理电机电源线。
连接件与车体组合
车头与丝杆及车体组合
安装车体顶板及主控
安装整体顶部固定板

附件
附件


 他的勋章
他的勋章
评论