 返回首页
返回首页
 回到顶部
回到顶部
这次搭建的关键在于仔细观看视频,了解螺丝的种类和位置。(我犯了个错误……我把电机安装到支架上时用的螺丝是“M3*5”,而我用的是更长的“M3*6”)。这个我会在后面的文章里讲解。
步骤 1,我将附带的两个“IRC18650 2200 mAh 电池放在充电器上”
第二步,对我来说,就是去除所有丙烯酸片上的保护膜。(我最讨厌的就是这一步)
步骤 3,用标签袋中的 8 个 M3*6 螺钉将电机支架固定到底板上
步骤 4,使用 8 个 M3*5 螺钉将电机固定到电机支架上
步骤 5,将轮毂安装到轴上(我使用锁紧螺钉……视频中没有)
步骤6:将轮子安装到电机的轮毂上。安装时要紧密配合。
步骤 7,安装支撑底座
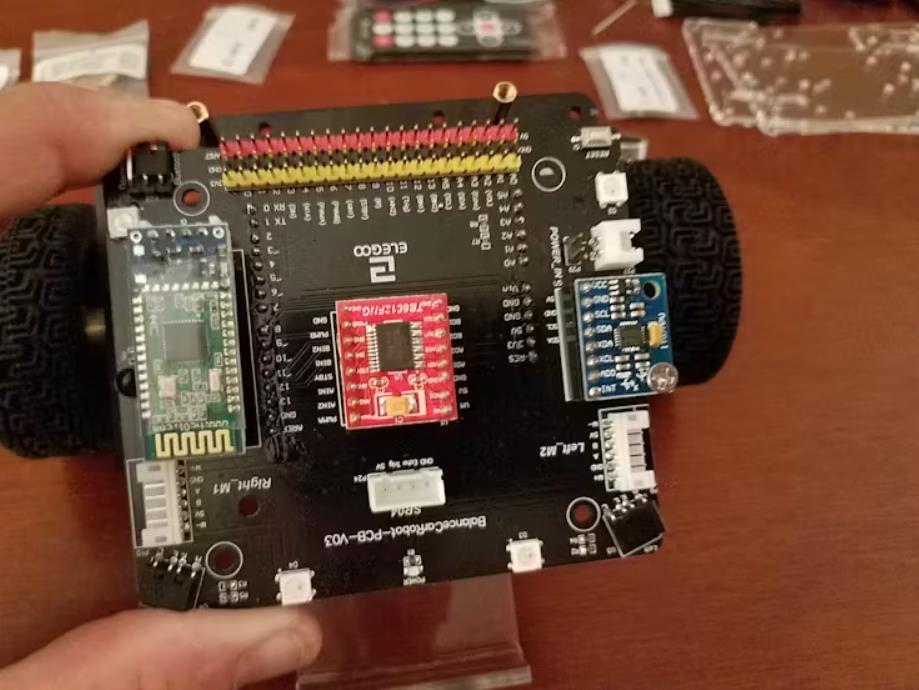
步骤 8,在载板上组装电子设备..收集 MPU6050(6 轴加速度计和陀螺仪)安装所需的物品
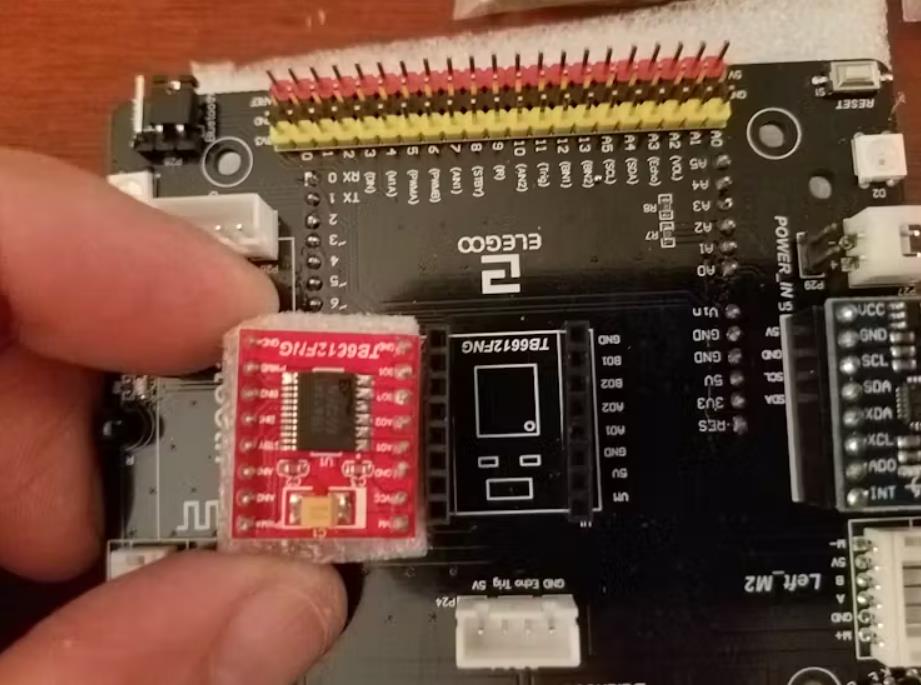
步骤 9,将 TB6612FNG(电机驱动器)用 M3*11 支架固定到载板上
步骤10,连接蓝牙模块
步骤 11,将 Elegoo UNO R3 连接到载板上
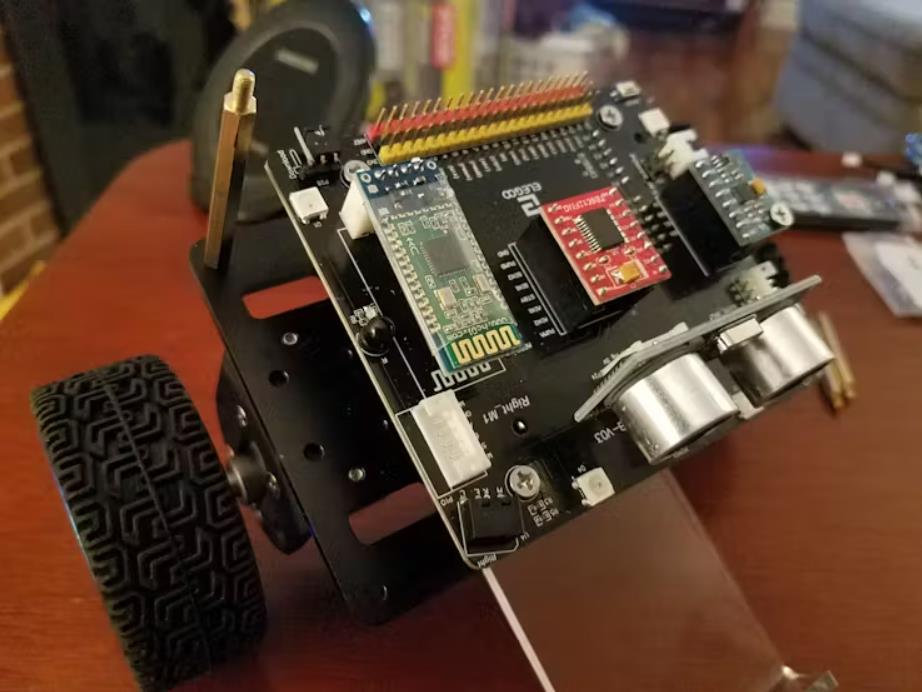
步骤 12,用 4 个 M3*6 螺钉将载板 M3*23 铜支架固定到组装好的底座上
步骤 13,使用 4 个 M3*6 螺钉将组装好的托架/电子模块固定到组装基座上
注意:注意组装基础单元的载体电子模块的方向
步骤 14,组装电池托架
注意:注意将电池座安装在带有电源线的板上,并将开/关开关与板上的凹口对齐
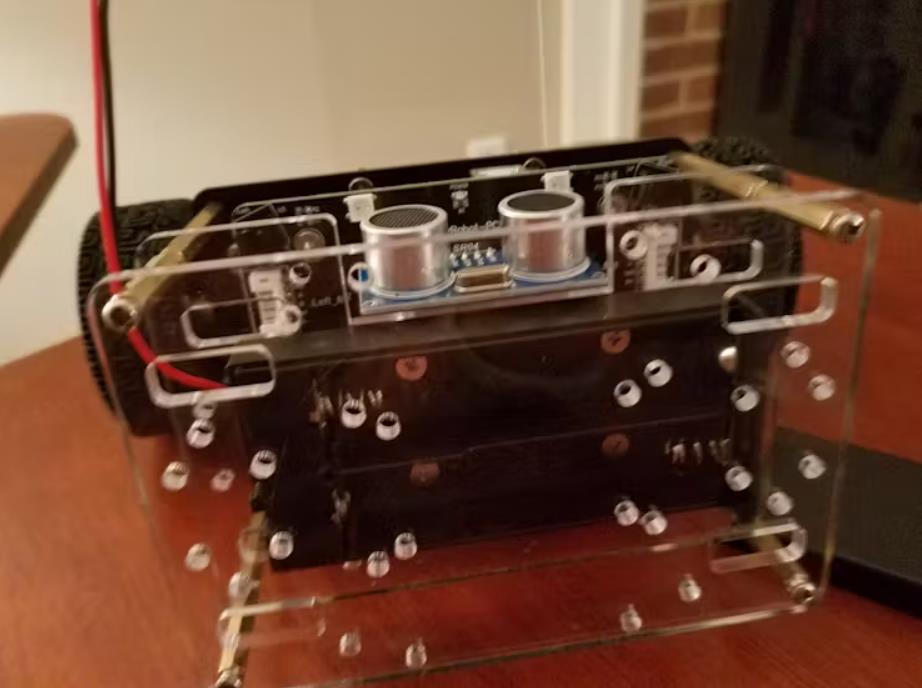
步骤 15,将组装好的挡板安装到之前安装在组装好的 Tumbllr 底座上的 M3*45+6 铜支架上
步骤 16,将 2 节已充电的“ICR18650”2200 mAh 电池安装到电池盒中
步骤17,用4个M3*6螺丝固定顶盖板
步骤18:仔细布线并安装互连电子线路,请参考图片。注意:务必将电池电源开关关闭。
步骤19,扔掉碎片
Elegoo的组装视频
Elegoo的组装视频
第 20 步,启动 Tumbllr,小心……一旦启动,Tumbllr 会快速移动并直立
第 21 步,Tumbllr 实际视频
使用红外遥控器操作的 Tumblr
红外遥控模式说明
通过按箭头键:向前、向后、向左和向右将导致 Tumbllr 做出相应反应,并开始蓝色发光
按下 OK 键:Tumbllr 将进入待机模式并停止运动
自动跟随模式说明
按下 #1 键:Tumbllr 将开始发出绿光,并将跟随超声波传感器前方 35 厘米范围内移动的任何障碍物;如果障碍物位于任一边缘 7 厘米范围内,则将导致 Tumbllr 根据边缘向左或向右转。
按下 #0 键:Tumbllr 将进入自动跟随模式,并发出绿色光芒,如果障碍物位于超声波传感器 35 厘米范围内,Tumbllr 将向后移动;如果障碍物位于任一边缘 7 厘米范围内,则 Tumbllr 将根据边缘向左或向右转。
避障模式
按下 #2 键:Tumbllr 将进入避障模式,并发出黄色光芒;在此模式下,Tumbllr 将自动避开超声波传感器前方 50 厘米范围内的障碍物。
弹跳模式
按下 #4 键:Tumbllr 将向前倾斜到塑料支架上
按下 #5 键:Tumbllr 将弹起并继续保持平衡
发光模式
按下 #3 键:Tumbllr 将开始闪烁/发光的随机灯光效果
再次按下 #3 键,它将切换为另一种发光效果。共有 6 种发光/灯光效果可供选择。
按下 #8 键:发光照明将变得更亮
按下 #7 键:发光照明将变为红色
再次按下 #7 键,发光照明将消失。
按下 #9 键:Tumbllr 将关闭所有灯光/照明
按下 #6 键:Tumbllr 将打开所有灯光/照明
蓝牙模式
将接口板上的跳线帽从 DOWNLOAD 位置切换到 BLUETOOTH 位置
您需要从 Android/Google 商店下载“ELEGOO BLE TOOL”(Elegoo 智能机器人汽车应用程序)
在 BLE App 中,
按“连接”按钮:
扫描设备...查找 HC-08(Elegoo 的 Tumbllr 蓝牙设备)
自定义 BLE 应用程序键盘按钮
您将按住每个编号按钮并在代码字段中输入相同的数字:
空白键“s” 待机
空白键“f”前进
空白键“b”向后
空白键“l”左转
空白键“r”右转
按钮*“*”BREAK-无功能
按钮#“#”BREAK-无功能
按钮 #1 键“1”自动跟随模式功能
按钮#2键“2”避障功能
按钮 #3 键“3”发光模式-每次按下时都会改变颜色效果-6 种可用
按钮 #4 键“4”弹跳模式-向下
按钮 #5 键“5”弹跳模式-直立
按钮 #6 键“6” 所有灯亮
按钮 #7 键“7”发出红色光,每次按下时照明都会变暗
按钮 #8 键“8”发出红色光,每次按下时照明都会变得更亮
按钮 #9 键“9” 所有灯关闭
按钮 #0 键“0”停止/待机功能。











附录
【Arduino 动手做】Pololu Zumo配置构建了一个平衡机器人
项目链接:https://www.hackster.io/alien-energy-3/what-do-i-build-next-an-elegoo-tumbllr-d4d091
项目作者:詹姆斯·马特尔
项目视频 :https://www.youtube.com/watch?v=ohW__ewmR8o
https://www.youtube.com/watch?v=IgZF8YD6wbs
项目参考代码:https://hacksterio.s3.amazonaws.com/uploads/attachments/662312/Tumbller.rar
https://hacksterio.s3.amazonaws.com/uploads/attachments/662314/Tumbller20181102.zip


 他的勋章
他的勋章


评论