 返回首页
返回首页
 回到顶部
回到顶部
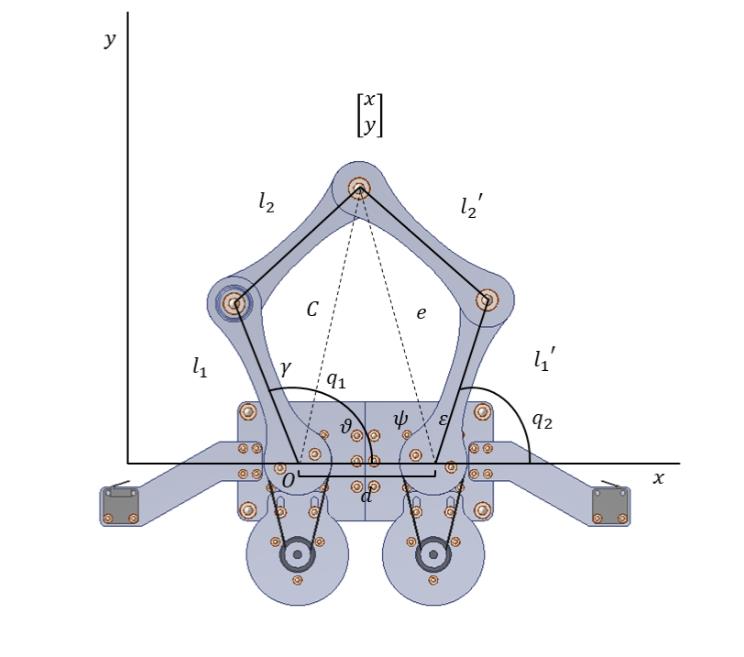
设计用作第一个机器人,向学生介绍机器人概念,例如:逆运动学和控制算法。
有了这个平面机器人,您可以使用正向和逆运动学和控制算法。
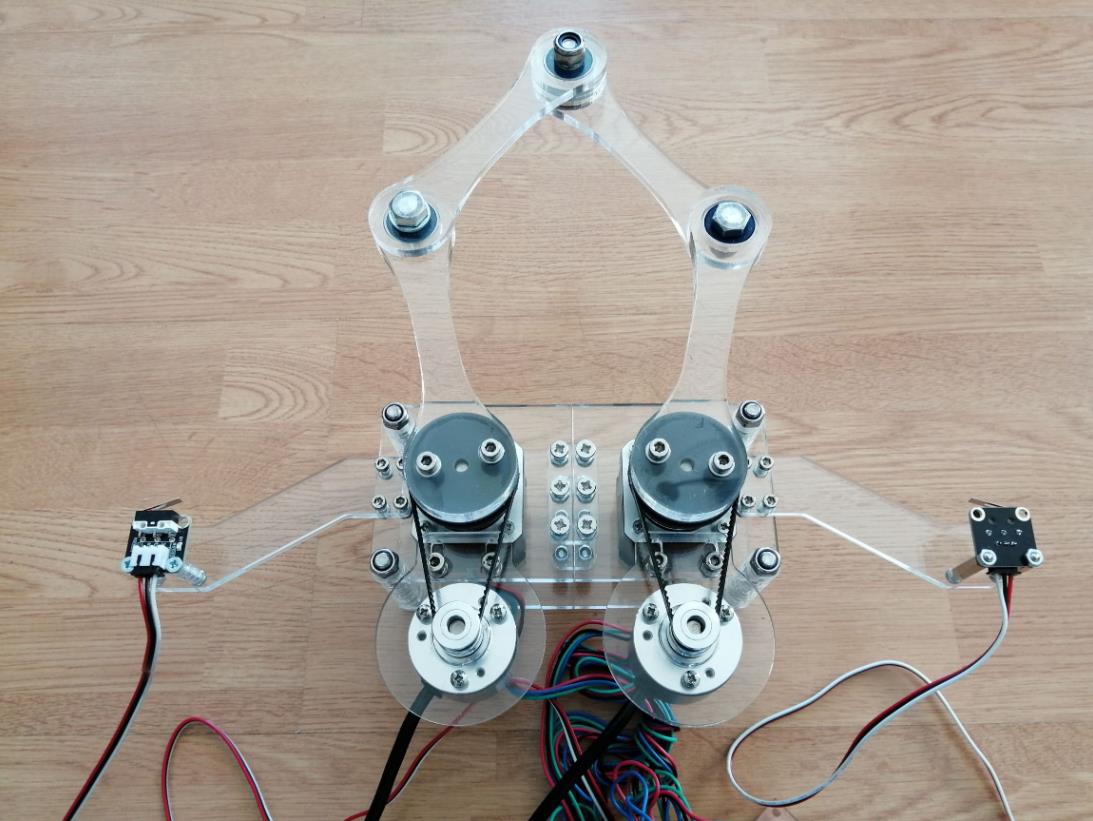
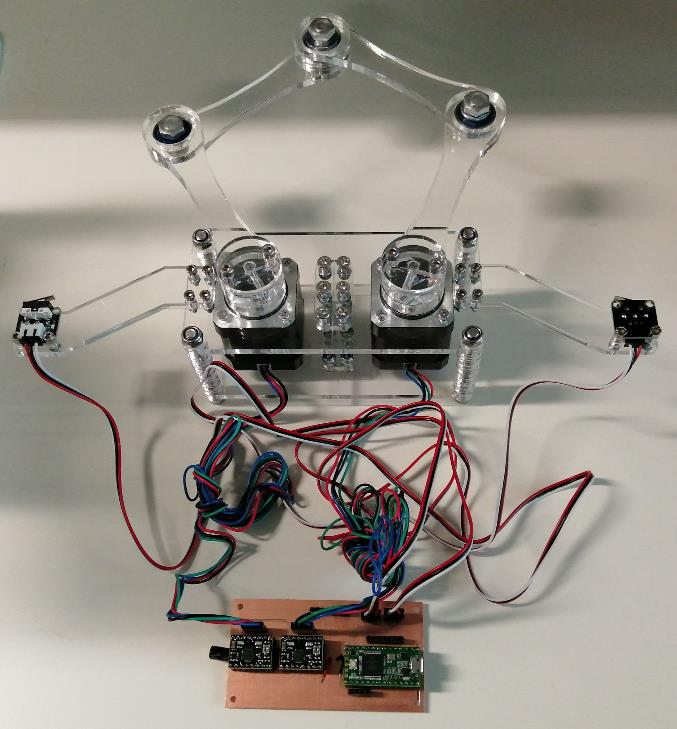
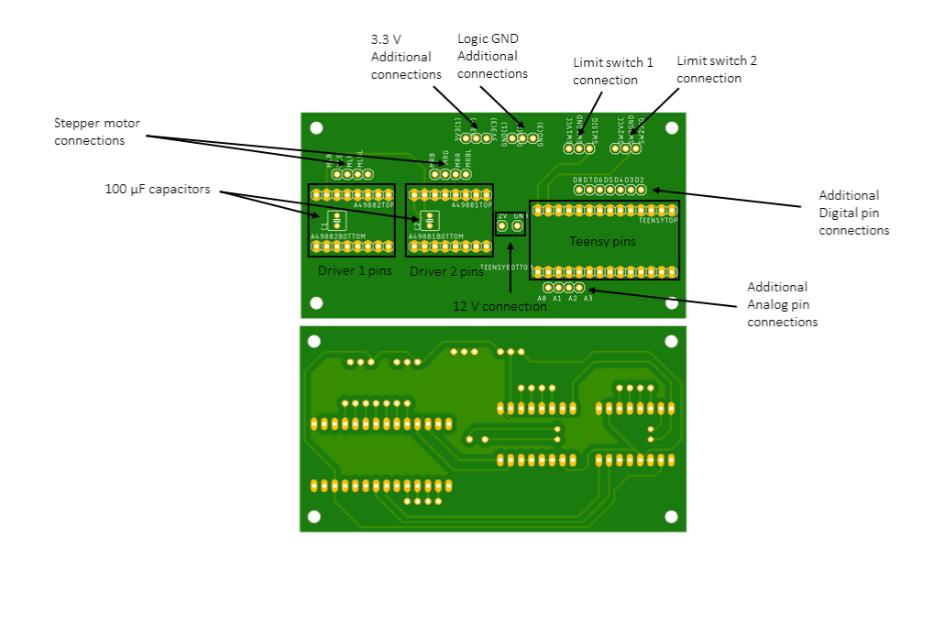
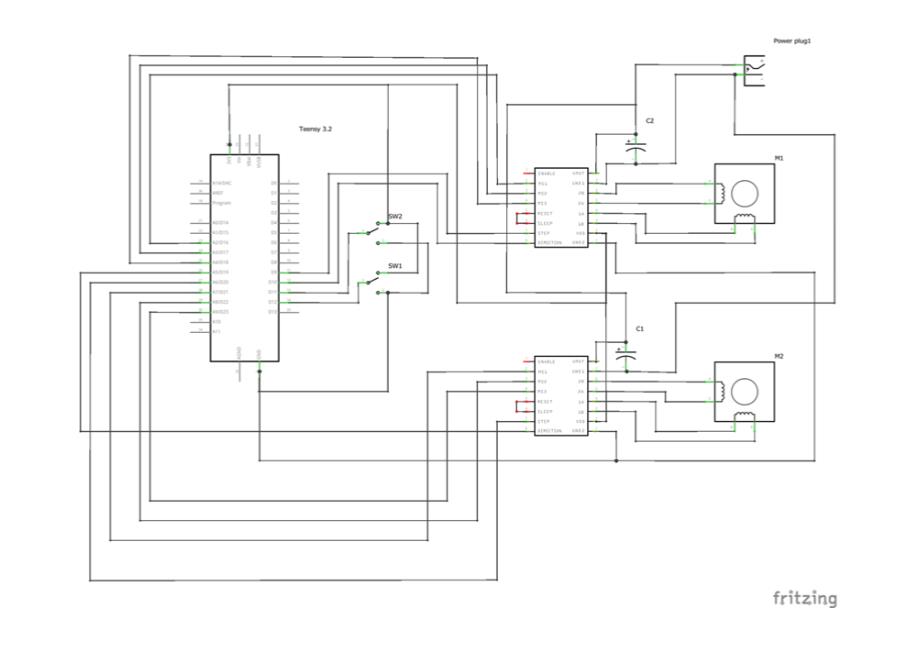
第二版和第三版基于 Teensy 3.2 微控制器、步进电机和限位开关。
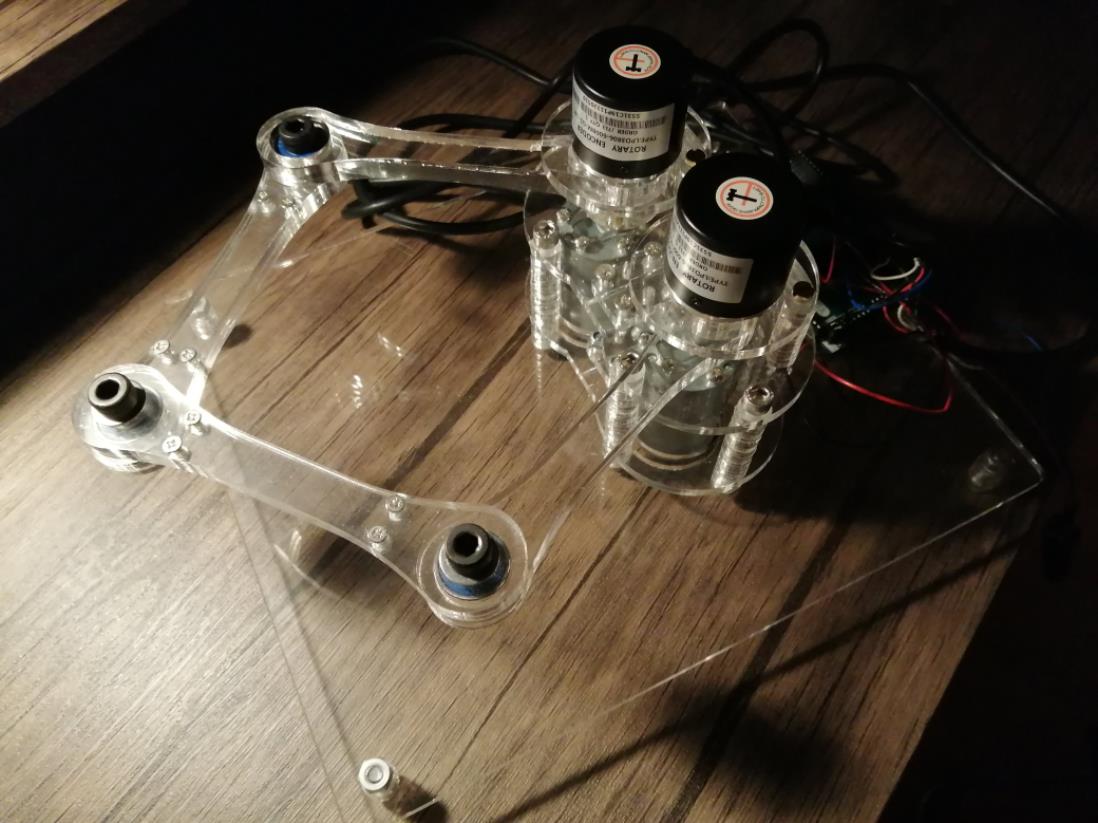
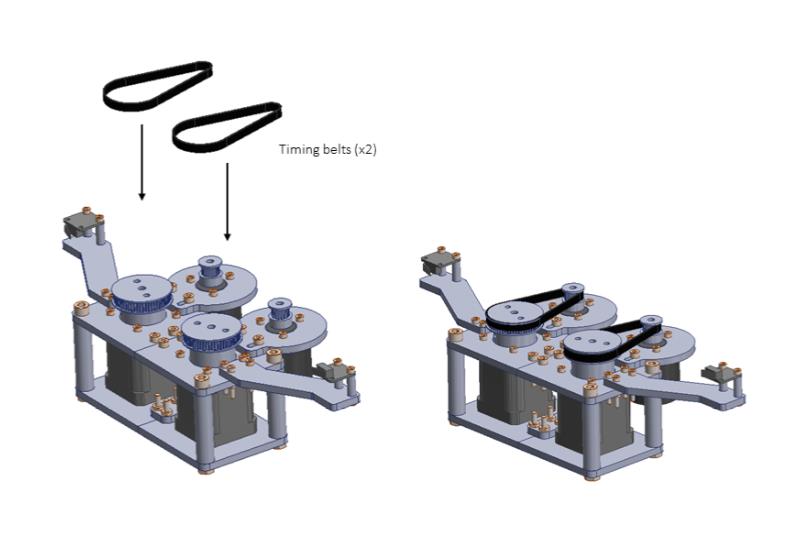
第三个版本有两个额外的孔,用于连接使用定时 GT2 皮带连接到机器人关节的两个增量编码器。
第一个版本涉及直流电机与编码器的闭环控制,同时涉及机器人中的运动学概念。
第二版的基本程序使用了teensyste.h库:
https://luni64.github.io/TeensyStep/index
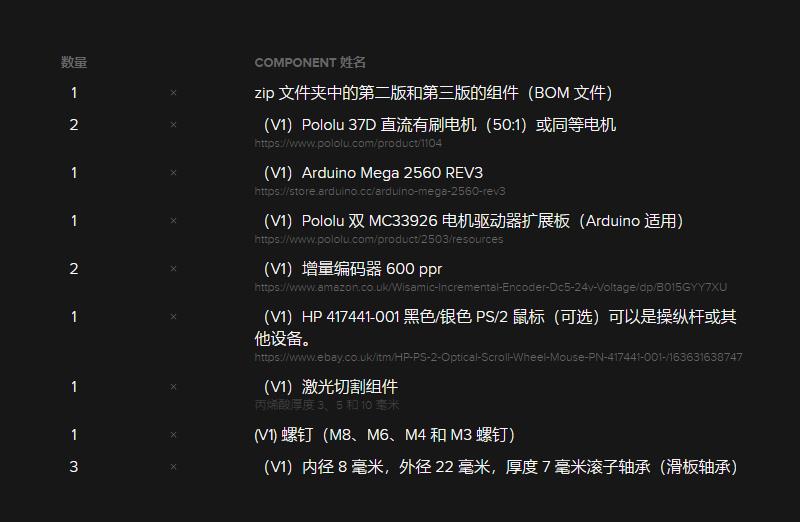
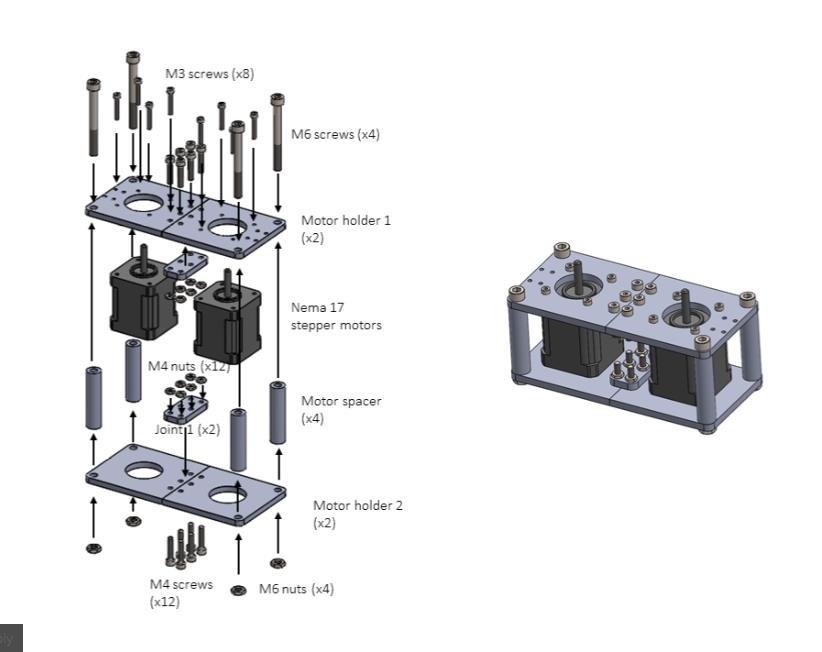
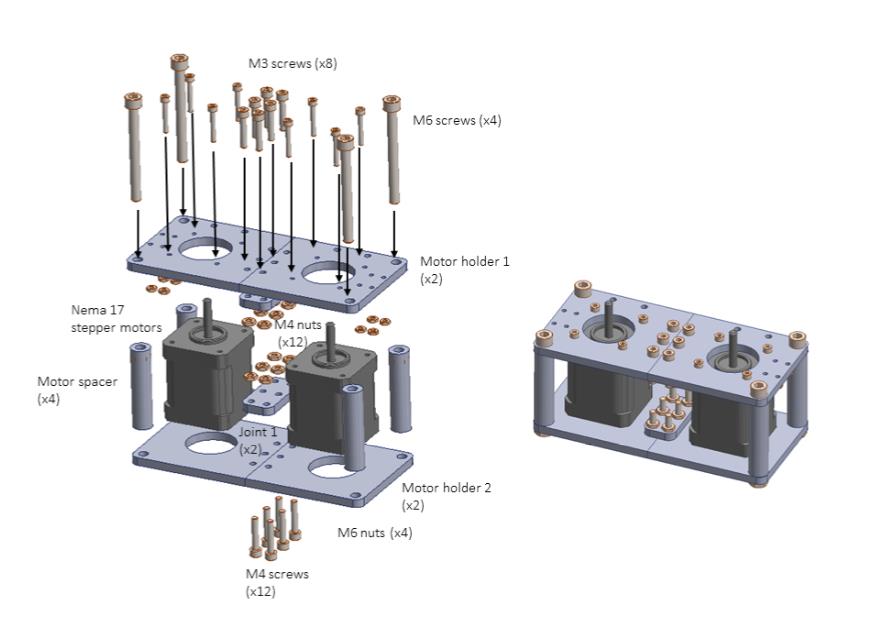
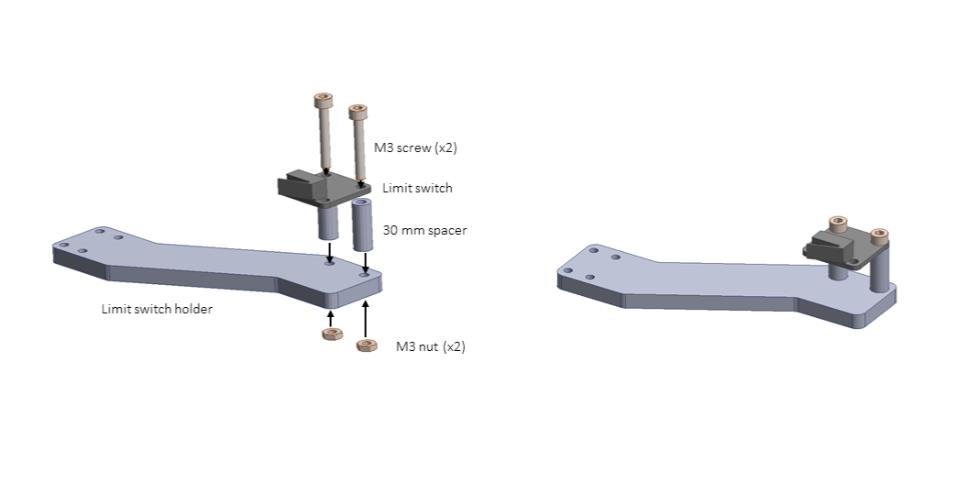
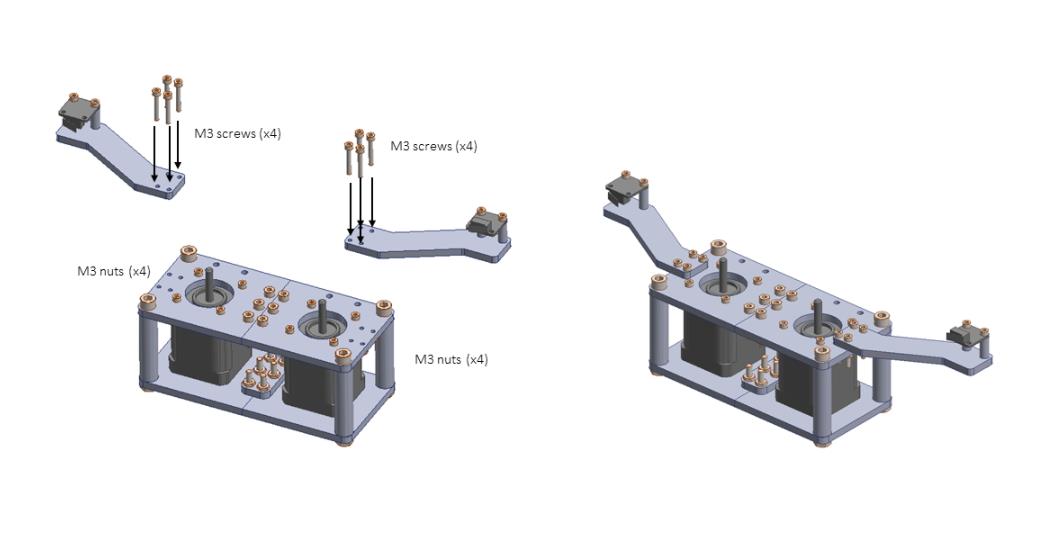
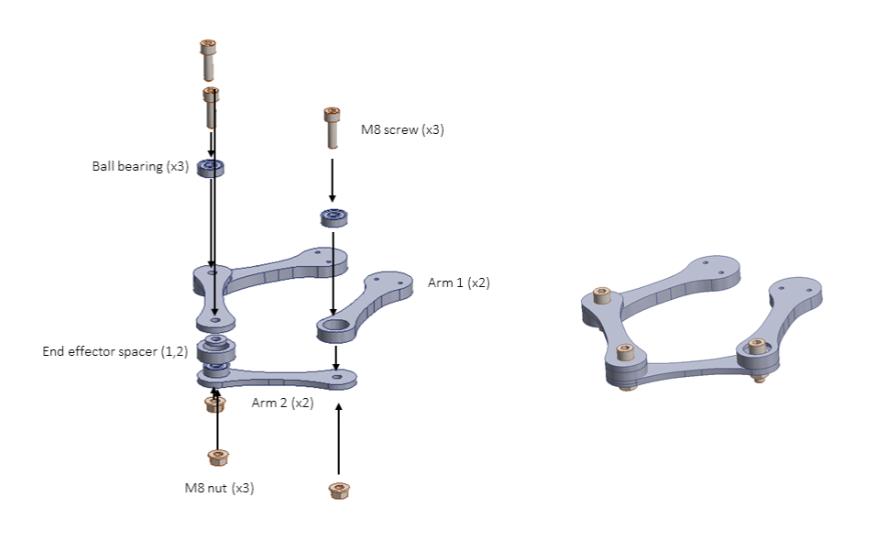
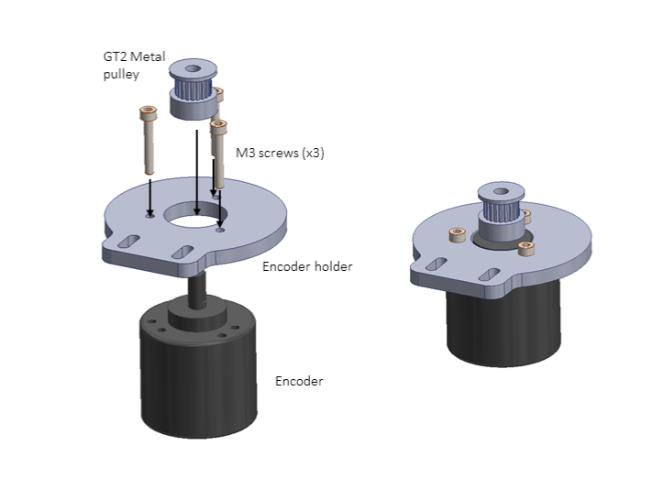
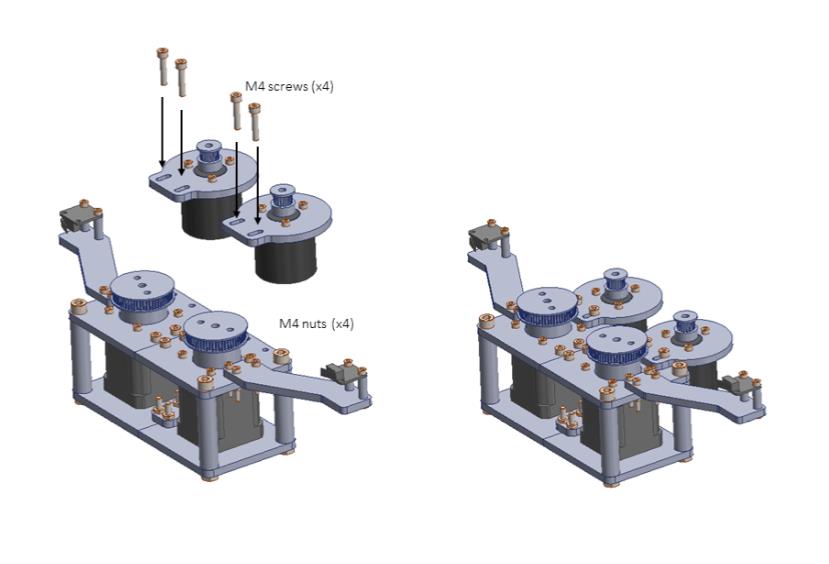
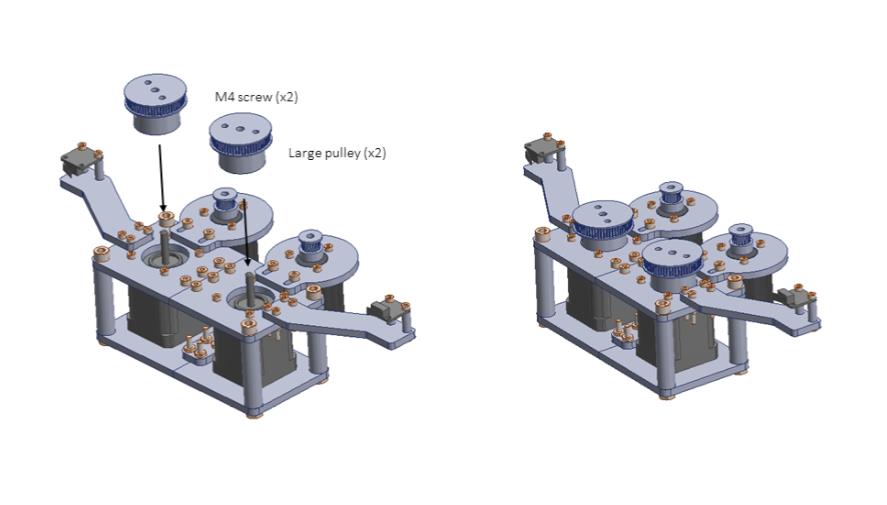
硬件清单
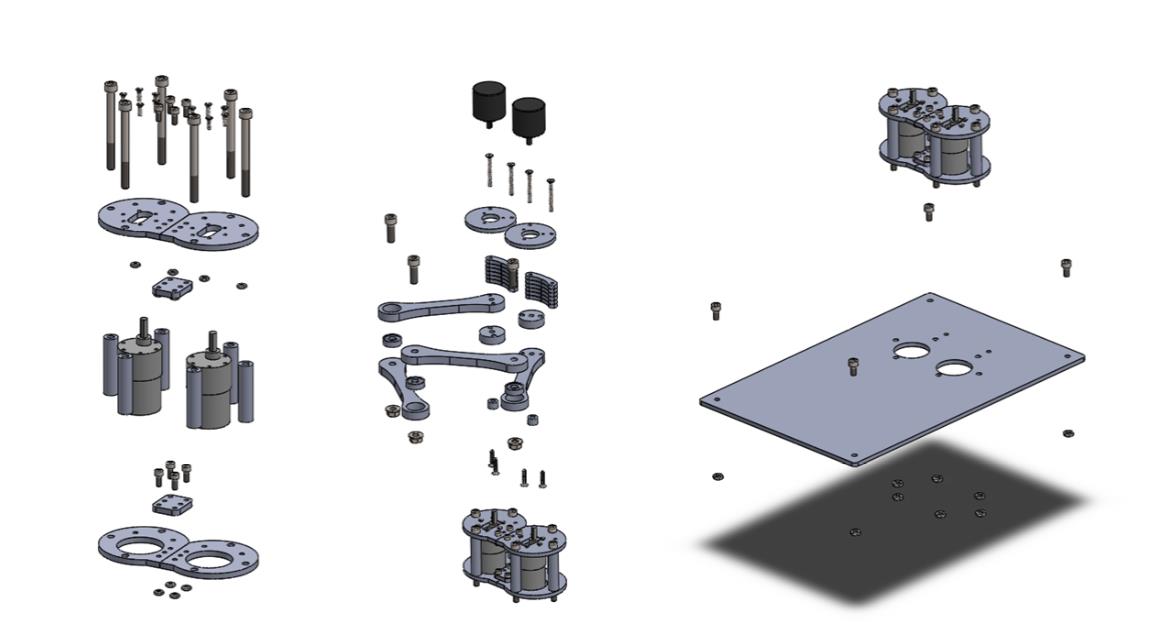
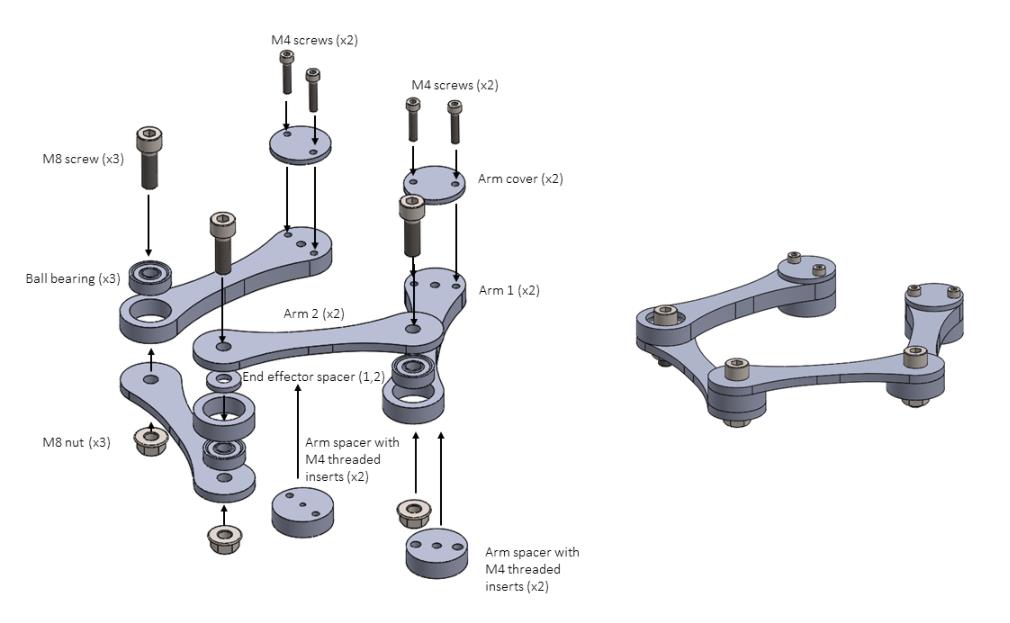
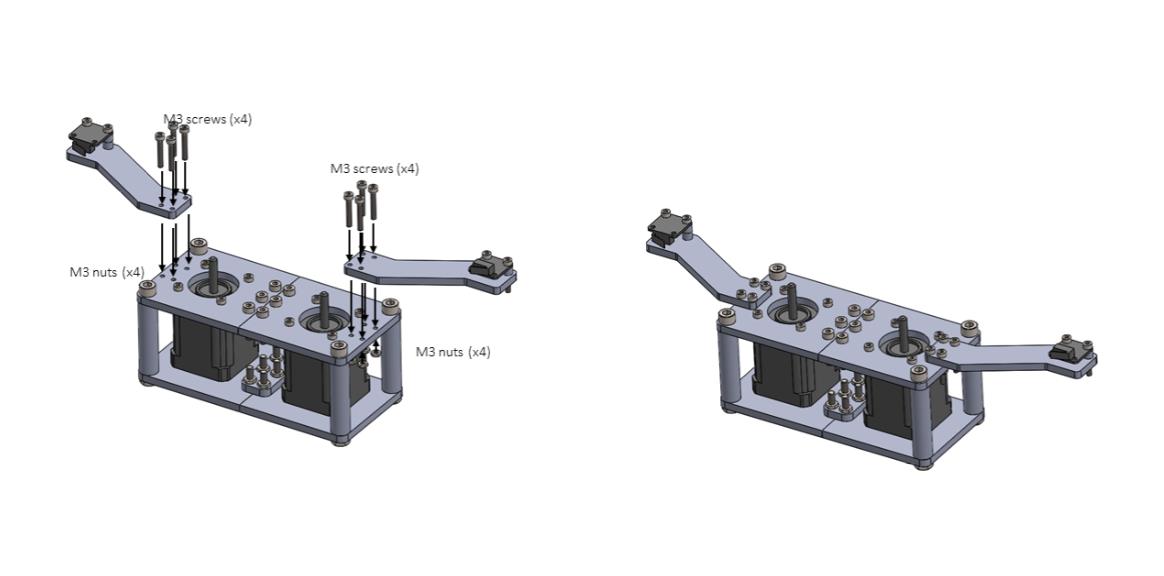
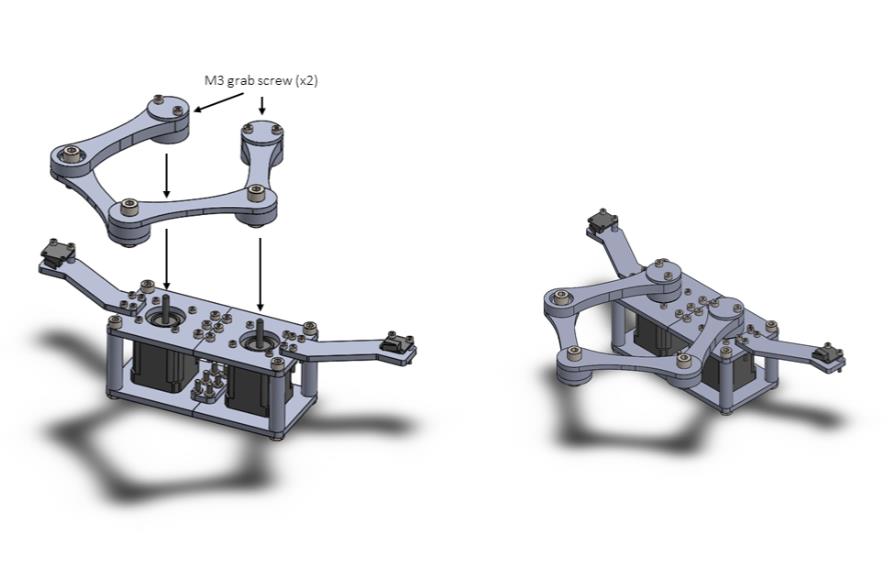
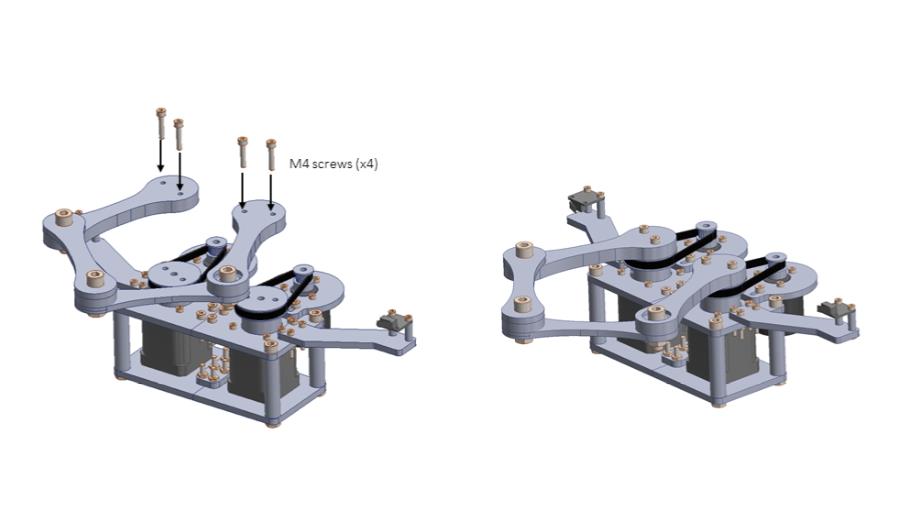
相关安装示意图





附录
【Arduino 动手做】教育型平面五杆并联机器人
项目链接:https://hackaday.io/project/173325-educational-five-bar-parallel-robot
项目作者:哈维·卡诺
项目视频 :
光电鼠标位置控制:https://www.youtube.com/watch?v=05XyfAV1to4
重复性测试 Y 轴:https://www.youtube.com/watch?v=BfiHG13mHDs&t=4s
基本矩形绘制:https://www.youtube.com/watch?v=c6jG3WN4W8Y
项目代码和 3D 文件:
https://cdn.hackaday.io/files/1733257415536800/Educational%20Five-Bar%20Parallel%20robot%20V1.zip
teensyste.h库:https://luni64.github.io/TeensyStep/index
如果您想用鼠标控制机器人(它可以通过许多其他界面进行控制,如触摸屏、操纵杆或发送轨迹形成矢量),您需要这个库:
https://github.com/zapmaker/OptiMouse
电机驱动器库(可以使用其他电机驱动器,例如L298N):
https://github.com/pololu/dual-mc33926-motor-shield
PID 控制器库通过编码器位置控制闭环中的电机位置:
https://github.com/DonnyCraft1/PIDArduino


 他的勋章
他的勋章


评论