 返回首页
返回首页
 回到顶部
回到顶部
Beetle 树莓派RP2350 - 使用PWM调速控制L298N
文章介绍了如何使用 DFRobot Beetle RP2350 开发板使用PWM控制L298N驱动模块对电动机进行调速。
感谢“无垠的广袤”大佬开源的拓展版
项目使用的扩展板详见: https://oshwhub.com/lijinlei0907/beetle-rp2350-expansion-board
模块介绍
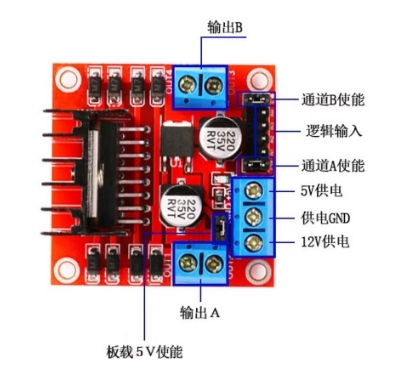
L298N模块
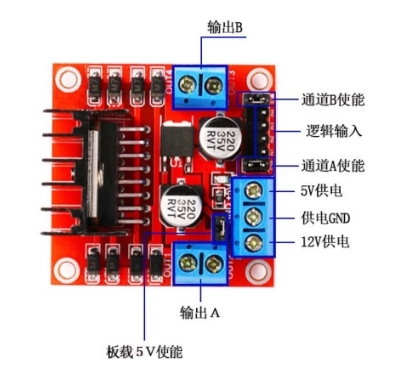
模块使用L298N作为主要驱动芯片,具有驱动能力强,发热量低,抗干扰能力强等特点。
主控芯片:L298N
工作模式:H桥驱动(双路)
逻辑电压:5V-7V
逻辑电流:0-36mA
驱动电压: 5-35V,如需要板内取电,则供电范围7V-35V
驱动电流:2A(MAX单桥)
存储温度:-20℃到+135℃
最大功率:25W
控制信号输入电压范围:低电平:- 0.3V≤Vin≤1.5V
高电平: 2.3V≤VinsVss
使能信号输入电压范围电平:-0.3≤Vins≤1.5(控制信号无效)
高电平: 2.3V≤VinsVss(控制信号有效)
硬件连接
电机使能
GP0 ---- IN1(左电机使能)
GP1 ---- IN2(左电机使能)
GP26 ---- ENA(左电机PWM)
GP8 ---- IN3(右电机使能)
GP9 ---- IN4(右电机使能)
GP27 ---- ENB(右电机PWM)
PWM控制输入
GP16 ---- (左电机PWM输入)
GP18 ---- (右电机PWM输入)
OLED屏幕
GP5 ---- SCL
GP4 ---- SDA
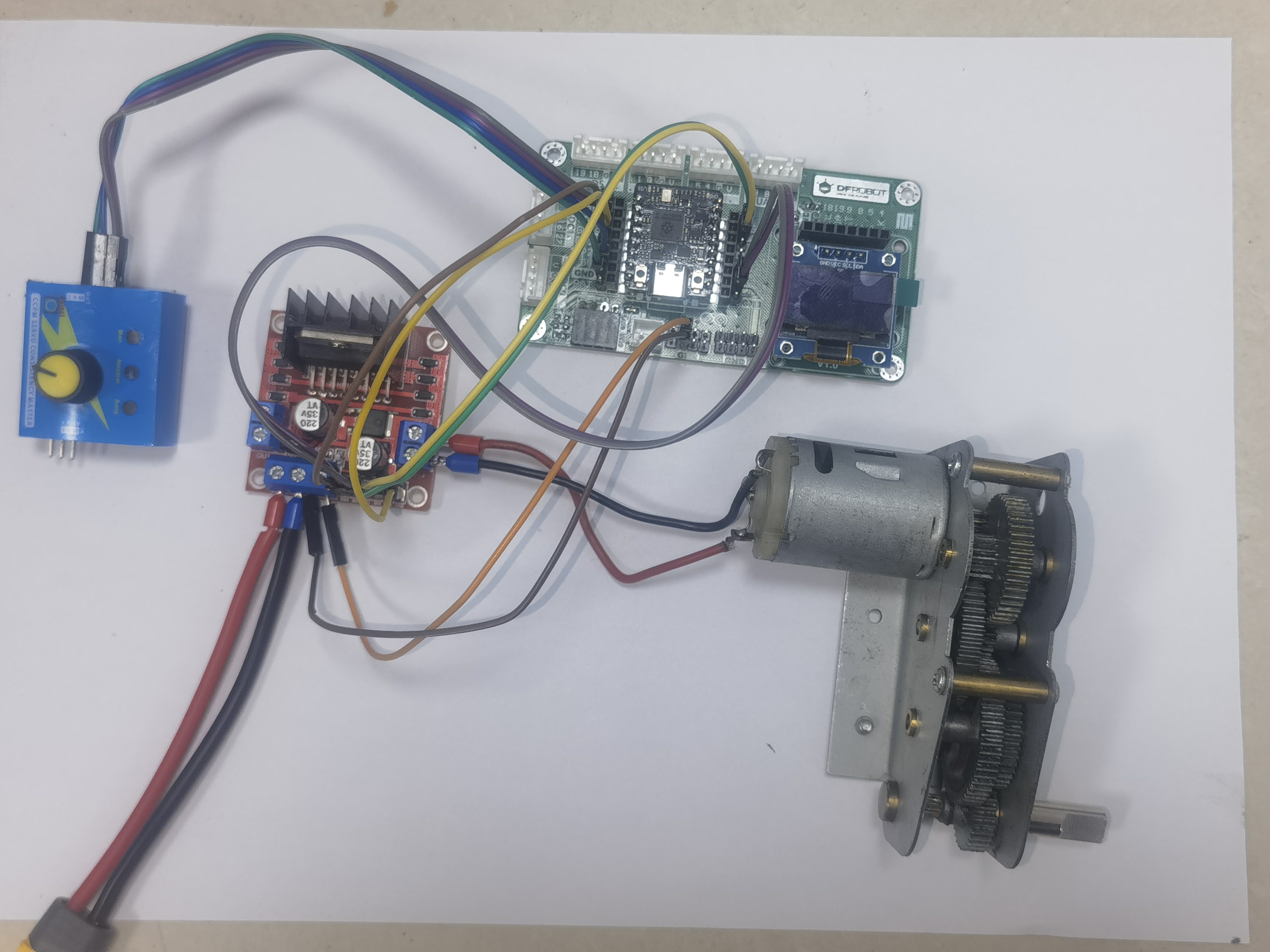
实物连接
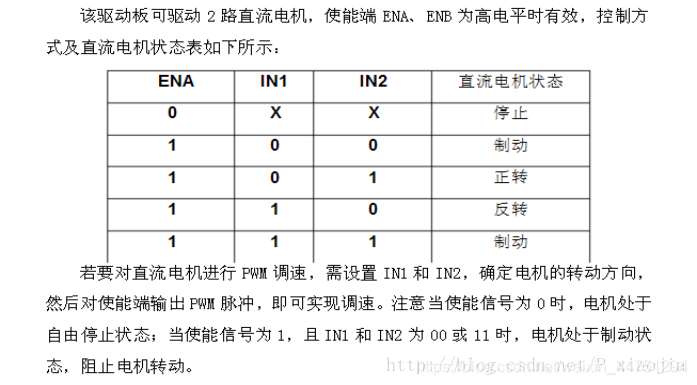
L298N控制逻辑

代码
/
RP2040双电机控制系统(带OLED显示)
功能:
1. 读取两个PWM信号控制左右电机
2. 信号丢失时自动停止电机
3. LED状态指示:
常亮:信号正常
快闪:信号丢失
4. 0.96寸OLED实时显示系统状态
硬件配置:
OLED: SCL=GP5, SDA=GP4 (I2C0)
电机控制:GP0,1,8,9,26,27
PWM输入:GP16(左), GP18(右)
状态LED:GP25
/
#include
#include
#include
// ================= OLED配置 =================
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_SDA 4 // GP4IN
#define OLED_SCL 5 // GP5
#define OLED_ADDR 0x3C // I2C地址
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, -1);
// ================= 电机控制引脚 =================
#define IN1 0 // 左电机方向1
#define IN2 1 // 左电机方向2
#define ENA 26 // 左电机PWM
#define IN3 8 // 右电机方向1
#define IN4 9 // 右电机方向2
#define ENB 27 // 右电机PWM
// ================= 遥控器输入 =================
#define PWM_LEFT 16 // 左摇杆信号
#define PWM_RIGHT 18 // 右摇杆信号
// ================= 状态指示 =================
#define LED_BUILTIN 25 // 板载LED
// ================= 全局变量 =================
// 信号检测
#define SIGNAL_TIMEOUT 100000 // 100ms超时(us)
unsigned long lastSignalTime = 0;
bool signalLost = false;
// 电机控制
int speedLeft = 0;
int speedRight = 0;
// LED控制
unsigned long previousLEDMillis = 0;
bool ledState = LOW;
// OLED控制
unsigned long lastDisplayUpdate = 0;
const int DISPLAY_INTERVAL = 200; // 刷新间隔(ms)
// ================= 初始化函数 =================
void setup() {
// 初始化串口
Serial.begin(115200);
Serial.println("RP2040电机控制系统启动...");
// 初始化I2C(RP2040专用方式)
Wire.setSDA(OLED_SDA);
Wire.setSCL(OLED_SCL);
Wire.begin();
Wire.setClock(400000); // 400kHz高速模式
// 初始化OLED
if(!display.begin(SSD1306_SWITCHCAPVCC, OLED_ADDR)) {
Serial.println("OLED初始化失败!");
while(true); // 卡死
}
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(SSD1306_WHITE);
display.setCursor(0,0);
display.println("RP2350,Robt");
display.println("OK,OK");
display.display();
delay(3000);
// 初始化电机引脚
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENB, OUTPUT);
// 初始化PWM输入
pinMode(PWM_LEFT, INPUT);
pinMode(PWM_RIGHT, INPUT);
// 初始化LED
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, LOW);
// 记录启动时间
lastSignalTime = micros();
}
// ================= 紧急停止函数 =================
void emergencyStop() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
analogWrite(ENA, 0);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
analogWrite(ENB, 0);
// OLED显示紧急状态
display.clearDisplay();
display.setCursor(0,0);
display.println("Jin,Ji");
display.println("Deng,Dai-PWM...");
display.display();
Serial.println("急停!");
delay(3000);
}
// ================= LED状态更新 =================
void updateLED() {
if(signalLost) {
if(millis() - previousLEDMillis >= 200) {
previousLEDMillis = millis();
ledState = !ledState;
digitalWrite(LED_BUILTIN, ledState);
}
} else {
digitalWrite(LED_BUILTIN, HIGH);
}
}
// ================= OLED显示更新 =================
void updateDisplay() {
if(millis() - lastDisplayUpdate < DISPLAY_INTERVAL) return;
lastDisplayUpdate = millis();
display.clearDisplay();
// 1. 标题栏
display.setTextSize(1);
display.setCursor(0,0);
display.print("RP2350");
display.drawFastHLine(0, 10, display.width(), SSD1306_WHITE);
// 2. 电机状态(紧凑布局)
display.setCursor(0,15);
display.print("L:");
display.print(speedLeft);
display.print(" R:");
display.print(speedRight);
// 3. 方向指示
display.setCursor(0,25);
display.print("Dir:");
if(speedLeft > 0) display.print("Fwd");
else if(speedLeft < 0) display.print("Rev");
else display.print("Stop");
// 4. 信号状态
display.setCursor(0,40);
display.print("Signal:");
if(signalLost) {
display.setTextColor(SSD1306_BLACK, SSD1306_WHITE);
display.print("NO-PWM!");
display.setTextColor(SSD1306_WHITE);
} else {
display.print("OK");
}
// 5. 运行时间
display.setCursor(0,55);
display.print("Up:");
display.print(millis()/1000);
display.print("s");
display.display();
//6.延时
//delay(1000);
}
// ================= 主循环 =================
void loop() {
// 1. 读取PWM信号
unsigned long pwmLeft = pulseIn(PWM_LEFT, HIGH, SIGNAL_TIMEOUT);
unsigned long pwmRight = pulseIn(PWM_RIGHT, HIGH, SIGNAL_TIMEOUT);
// 2. 检测信号状态
signalLost = (pwmLeft == 0 || pwmRight == 0);
if(!signalLost) {
lastSignalTime = micros();
// 3. 计算电机速度
speedLeft = constrain(map(pwmLeft, 1000, 2000, -255, 255), -255, 255);
speedRight = constrain(map(pwmRight, 1000, 2000, -255, 255), -255, 255);
// 4. 控制左电机
if(speedLeft > 0) {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, speedLeft);
} else if(speedLeft < 0) {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, -speedLeft);
} else {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
analogWrite(ENA, 0);
}
// 5. 控制右电机
if(speedRight > 0) {
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, speedRight);
} else if(speedRight < 0) {
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, -speedRight);
} else {
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
analogWrite(ENB, 0);
}
} else {
// 6. 信号丢失处理
if(micros() - lastSignalTime > 200000) {
emergencyStop();
}
}
// 7. 更新状态指示
updateLED();
updateDisplay();
// 8. 调试输出
Serial.print("L:");
Serial.print(pwmLeft);
Serial.print(" R:");
Serial.print(pwmRight);
Serial.print(" | ");
Serial.println(signalLost ? "信号丢失" : "信号正常");
delay(20);

效果展示


 他的勋章
他的勋章

评论