 返回首页
返回首页
 回到顶部
回到顶部
5.25 周日 阴
前言:在上个帖子中,记录了我如何用比较规范的废旧材料做一条有点好看的用于膝跳反射演示的腿模型,它以成本低廉方便复刻而著称。如果你也找到了这些材料,那么它无非就是锻炼一下你的动手能力而已。
而这个帖子,我将分享脊髓模型的制作过程,完成后它将和那条腿组合成整个演示装置,然后进行编程调试。
目标任务:
1、模型组装完成后。

2、功能:
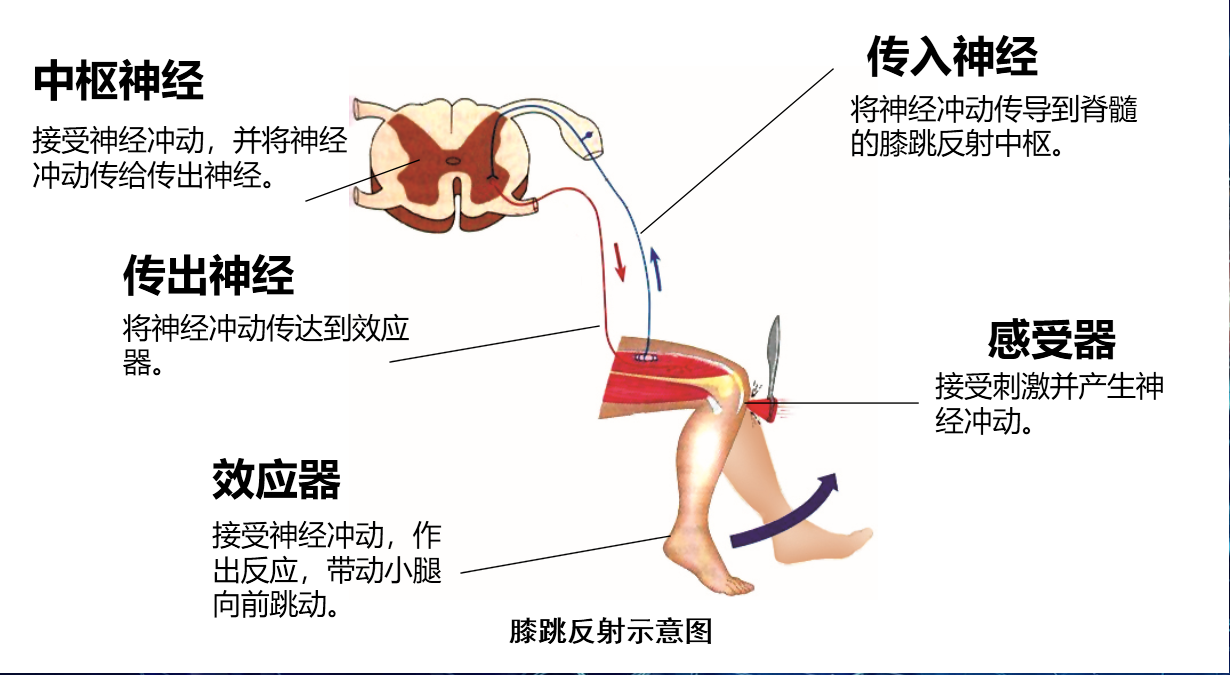
a、开机上电,播放膝跳反射及反射弧知识点,叩击膝下韧带开始演示。
b、叩击韧带(碰撞传感器),传入神经(灯带上部)蓝色流水灯显示神经冲动传入神经中枢(脊髓),在脊髓中由传入神经元将兴奋传给传出神经元(灯带下部),传出神经红色流水灯显示神经冲动传到效应器(舵机),舵机运行带动小腿进行膝跳动作。
c、隐藏功能,演示突触:兴奋在两个神经元间通过神经递质的传递。这个功能通过K10的语音控制演示,演示时K10屏幕上显示突触兴奋传递的动画,同时整个演示膝跳反射的全过程。
步骤1 脊髓模型的器材准备
1、行空板K10,后面可以换成任意主控比如M10。

2、锂电池:锂电池电源管理模组
3、雪弗板4mm,也可以用瓦楞纸板,做脊髓模型的底板。不过雪弗板确实好塑形,而且。
4、手工瓦楞纸,本色,要这种容易折的,它用来做脊髓模型的立面。

5、半透明塑料板,白色,厚0.3mm,用来做脊髓模型的上面,半透明,可以将灯带的光透出来。
6、W2812 RGB 灯带,用来做表示传入传出神经,40灯。DF商城有售,可裁剪,有背胶。

材料备齐,可以开工了。
步骤2 脊髓模型制作
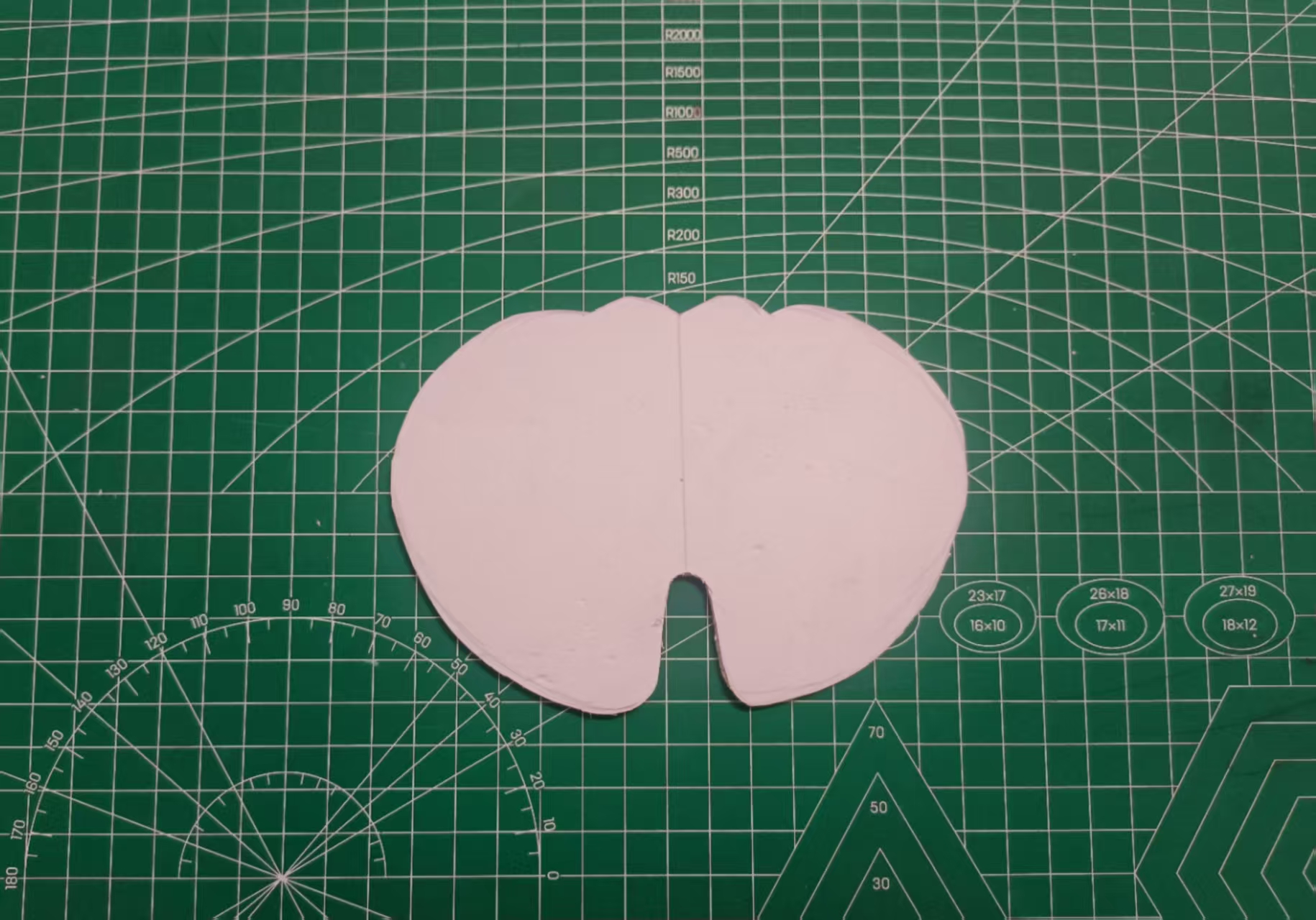
在一块10*14cm的雪弗板上,画出脊髓模型的横截面,再用刻刀小心刻出。这样做出的脊髓模型中可以放入常用的主控板,包括aduino、M10+扩展板、掌控板、K10、micro:bit等。
瓦楞纸切4cm宽的长条,围绕上面的底板用胶枪粘牢。

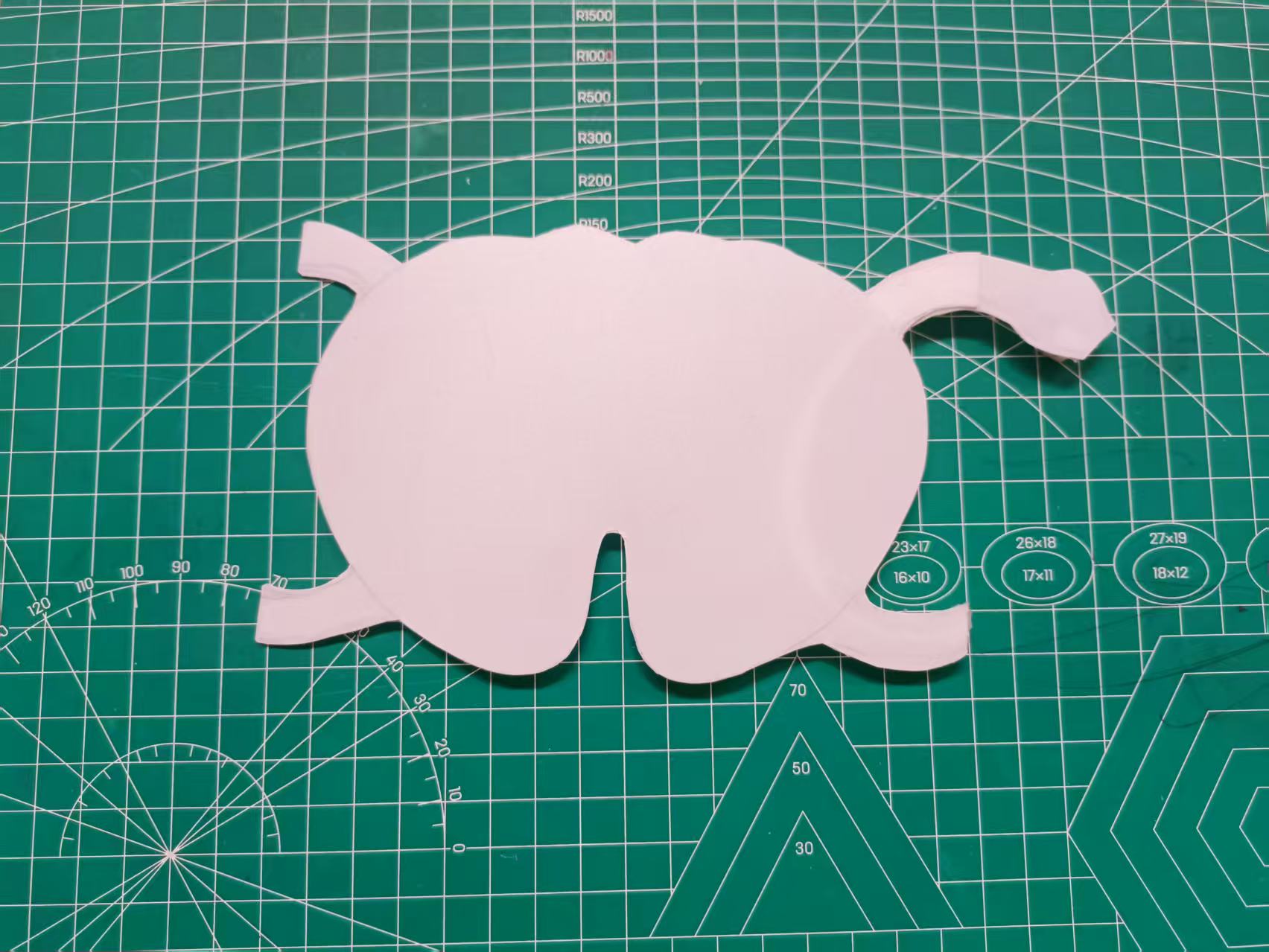
相同的规格在白塑料板上画出脊髓图样,剪下。我剪了两个,因为我计划一个开方孔,一个不开。K10的屏幕上我要让它显示突触传递兴奋的动画。
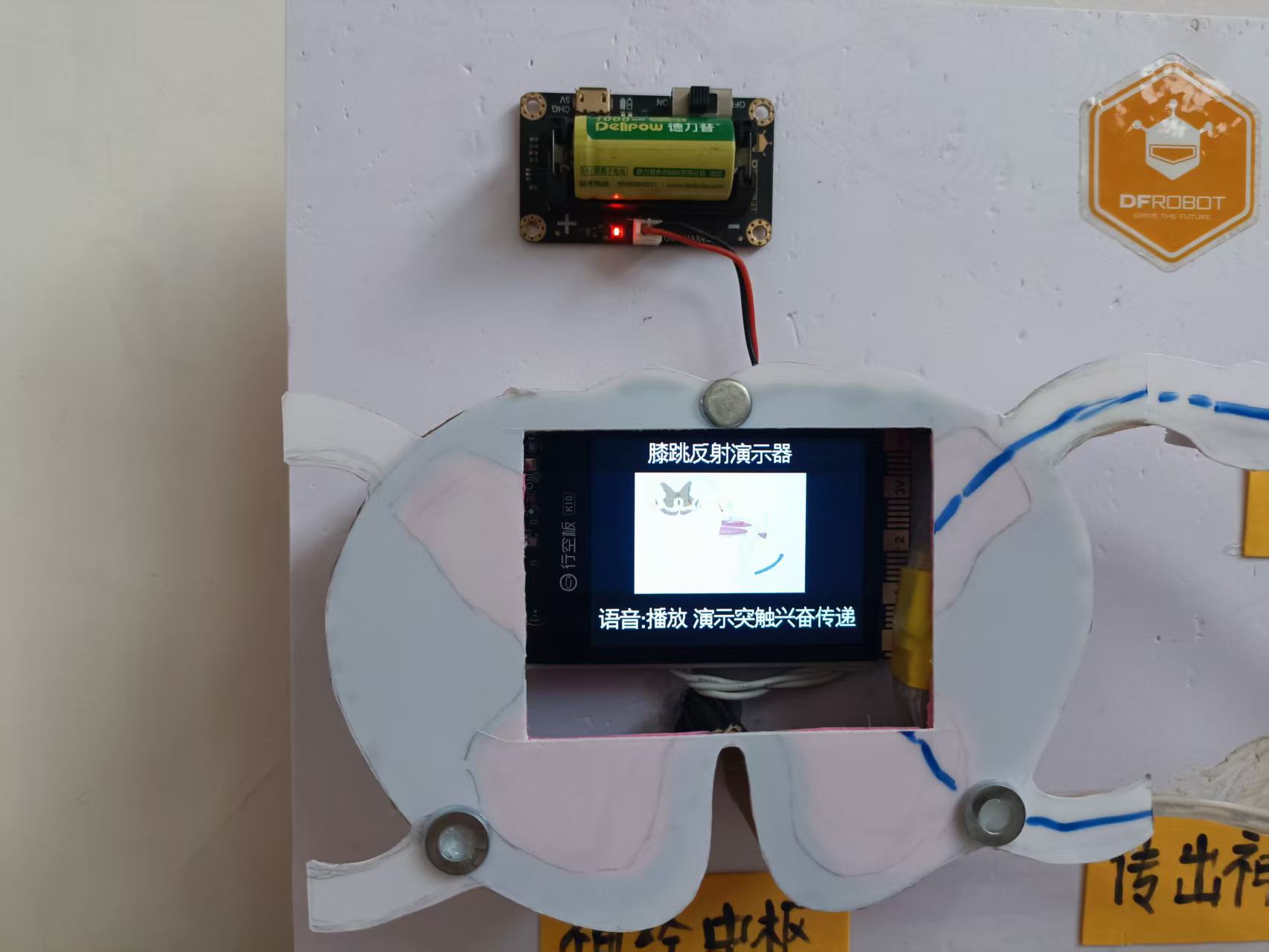
放入K10主控板。

粘上灯带,这一步要结合模型在展示板面上的整体安排。粘上上带大方孔面板。
用三个小磁铁和铁片来磁吸最外层的面板。
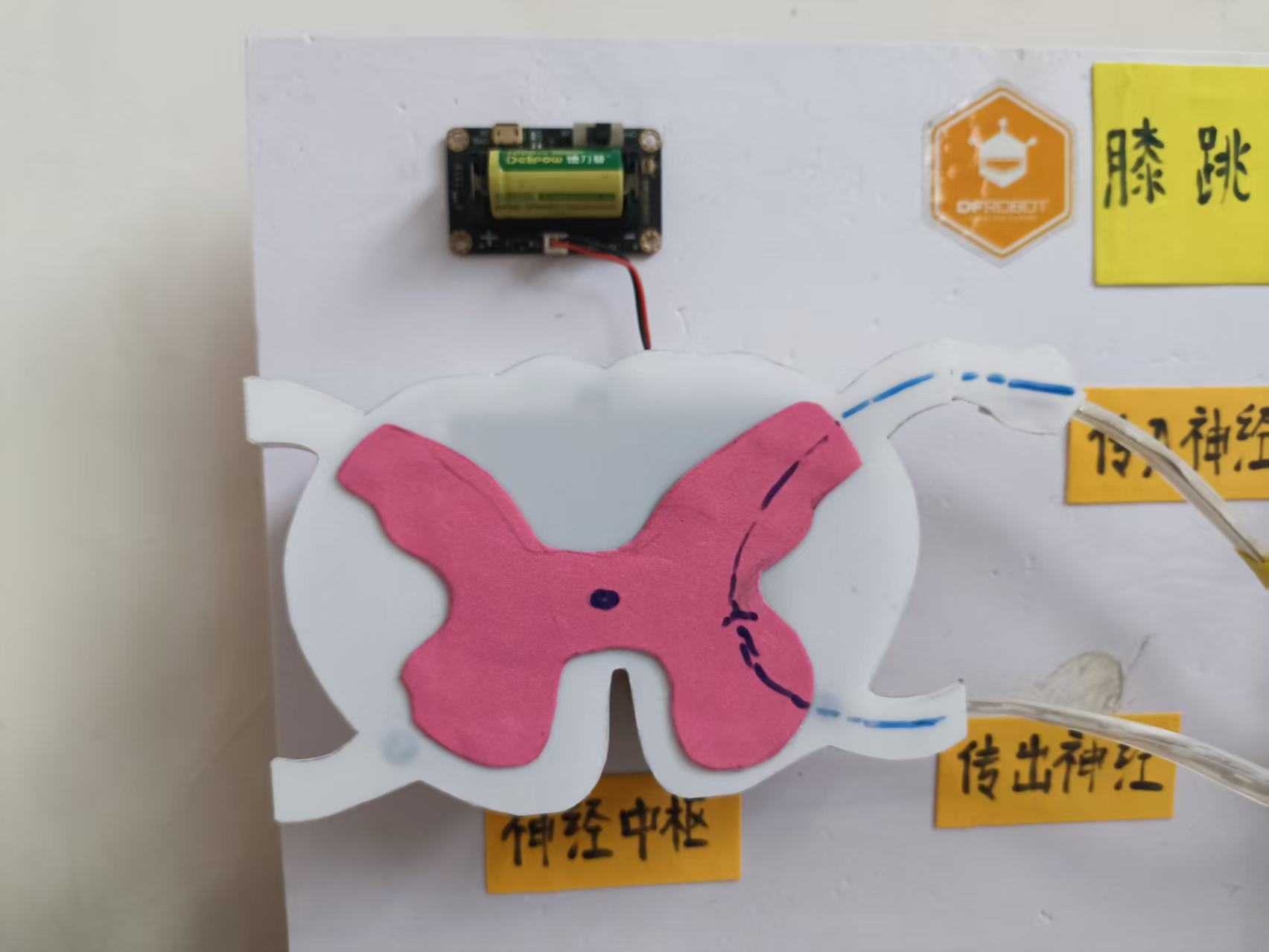
这样白色的面板代表脊髓白质。再贴上灰质。画出传入传出路径。
在我的模型中,W2812 RGB 40灯灯带接入P0。用一个锂电池模块来给K10供电,它有开关,而且方便换电池,当然也能充电。
至此,一个立体的脊髓模型就完成了。
步骤3 膝跳反射模型组装
接线:
脊髓:行空板K10+锂电电源模块+W2812 RGB灯40颗
灯带接行空板K10的P0口。
腿:掌控板+扩展板+舵机+碰撞传感器
舵机接P0口,碰撞传感器接P1口。
行空板和掌控板通过无线广播通信。
特别提醒:
K10只支持点亮一条灯带,可以选择P0或者P1,外接灯带后板载灯带不能使用。
这里可以解释一下,因K10只提供了P0和P1两个外接接口,所以不能接入更多模块,所以在上一个帖子中,那条腿上用掌控板来做主控,N+ 扩展板来供电,K10和掌控板用无线连接,这样子整个模型就省去了布线,显得简洁很多。同时还有一个重要的原因,物理隔离了灯带和舵机,它们由两年主控分别控制,分别供电,这样的好处是,避免了灯带点亮时电流信号对舵机的干扰,减少了舵机抖动(单一主控下舵机受到影响太大了,特别是长灯带时)。
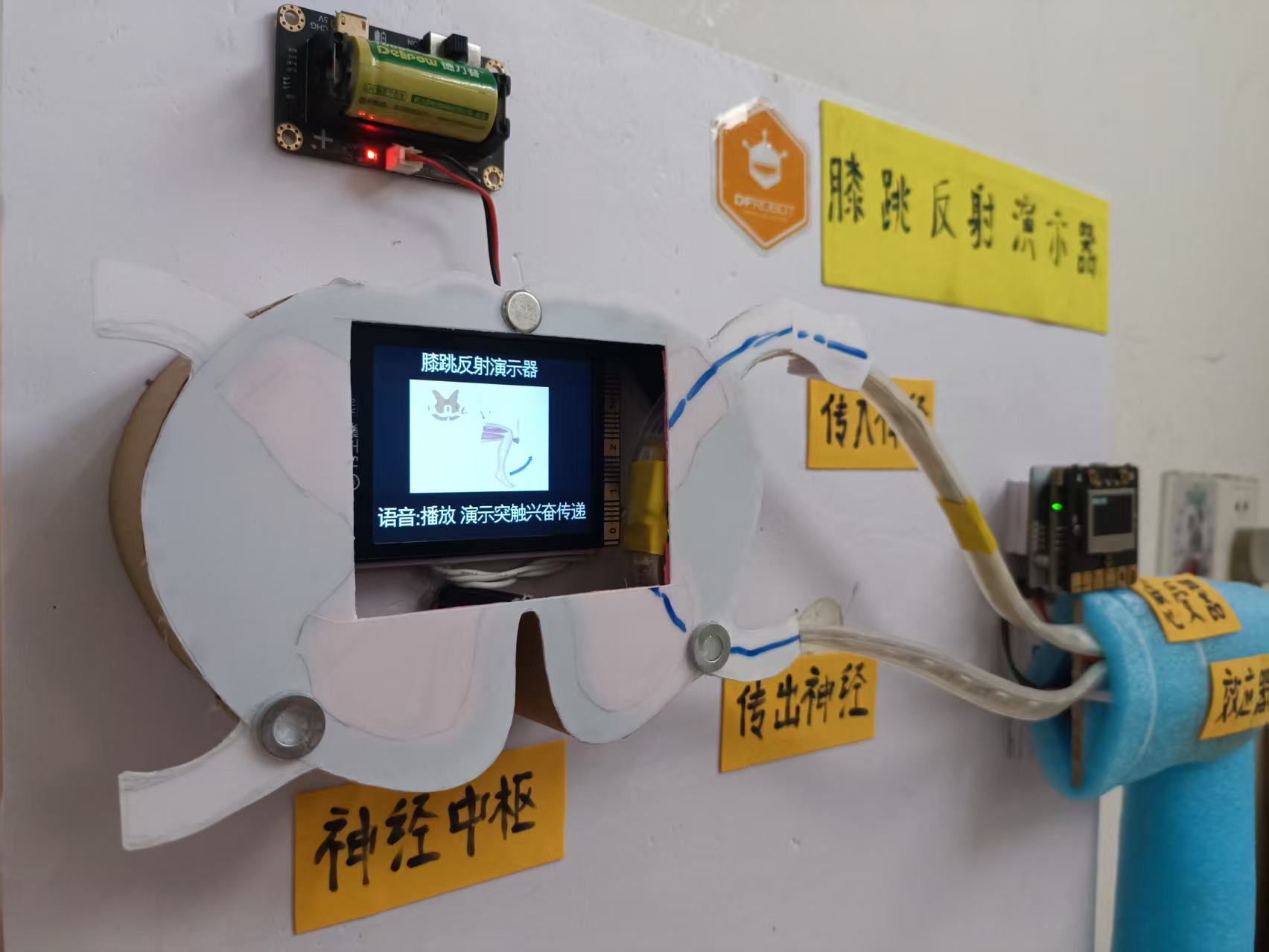
将脊髓模型和腿模型组合到一张雪弗板上,装上支架,成品是这样子的。
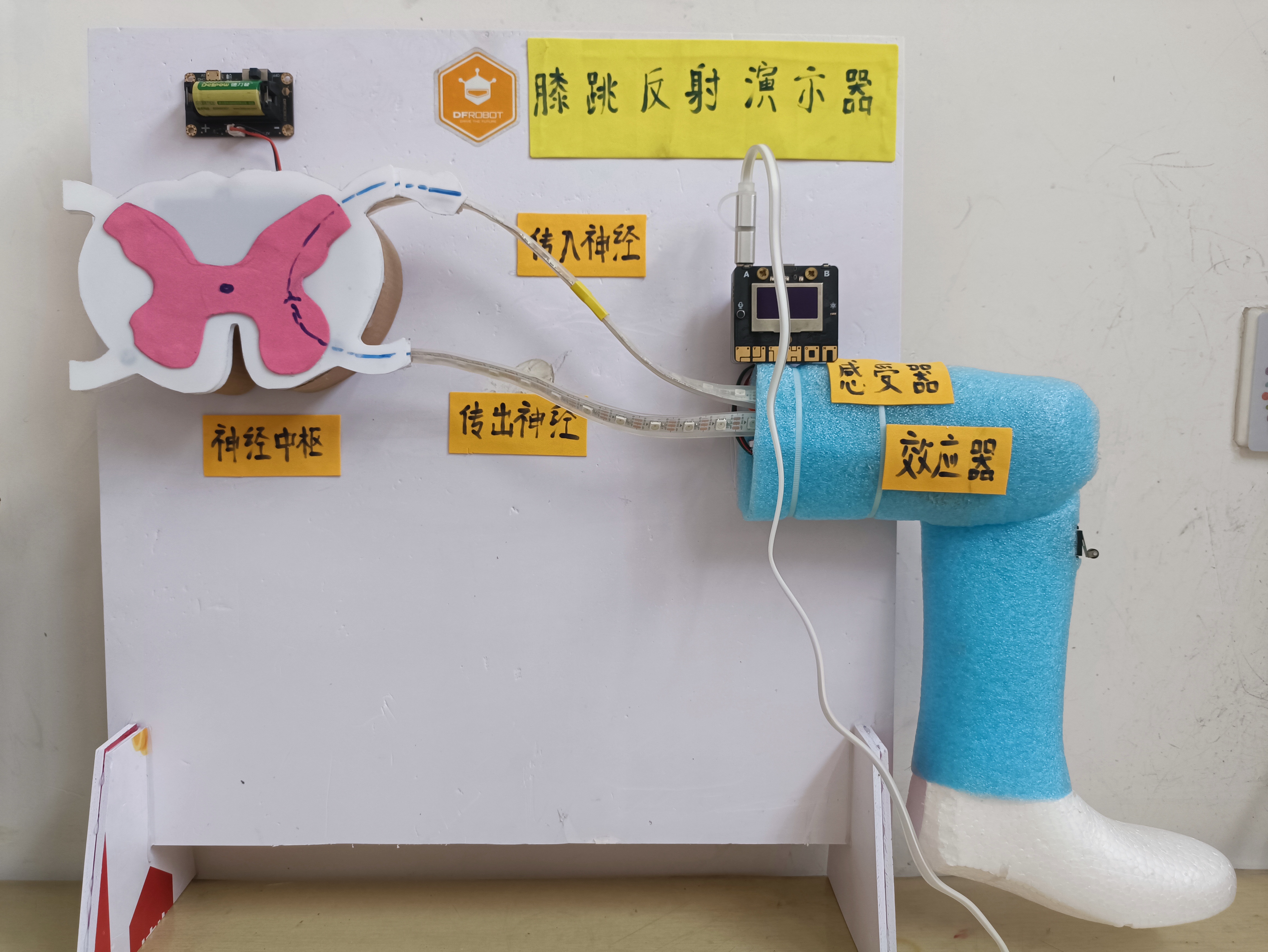
脊髓模型的上盖有两层,通过磁吸固定,取掉上层盖板可以通过方孔观看K10屏幕上由语音控制播放的动画演示--突触:兴奋传递。
相关知识可以移动到上一个帖子观看视频讲解:
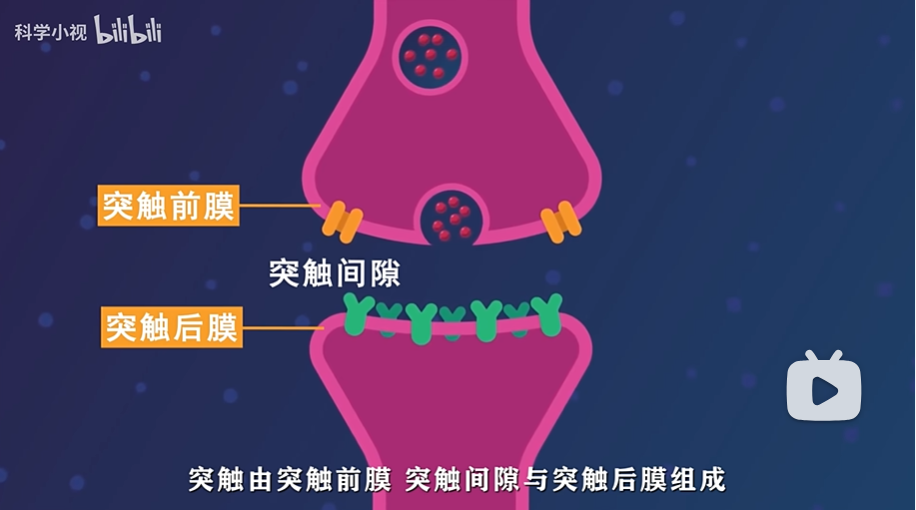
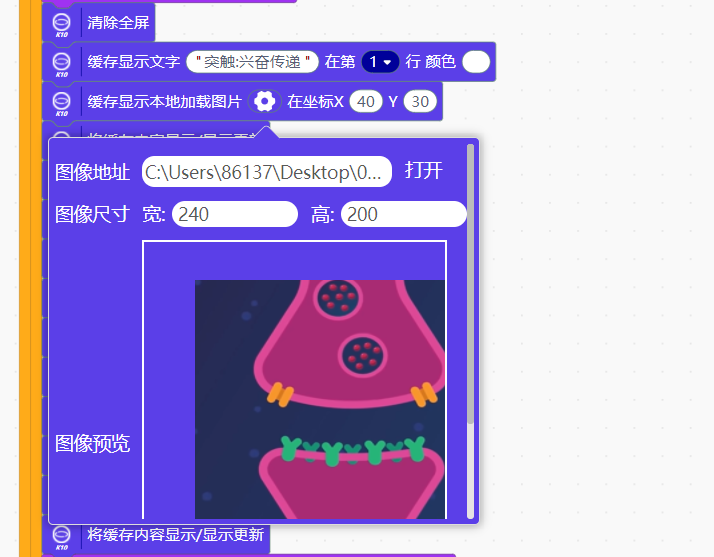
准备的动画图片如下:
等待感受器兴奋传来

兴奋到达

突触小泡移动与突触前膜融合

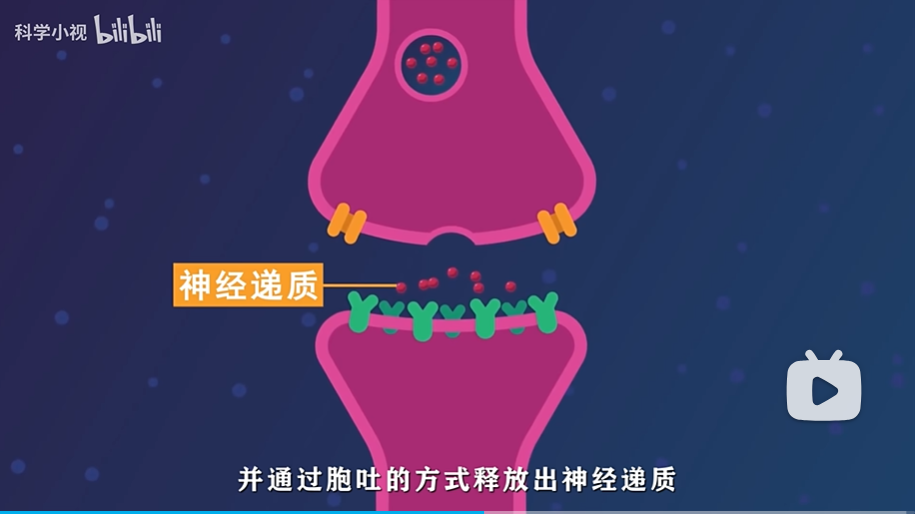
神经递质传递
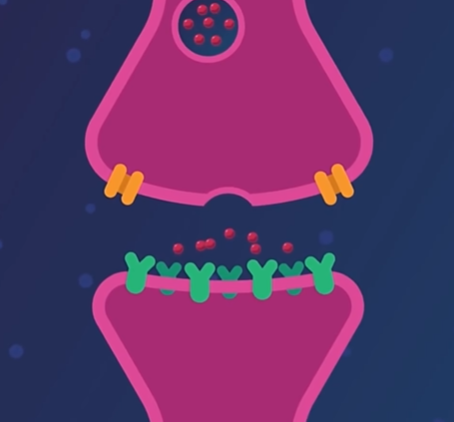
兴奋到达突触后膜,沿传出神经传向效应器

步骤4 程序编写与设备调试
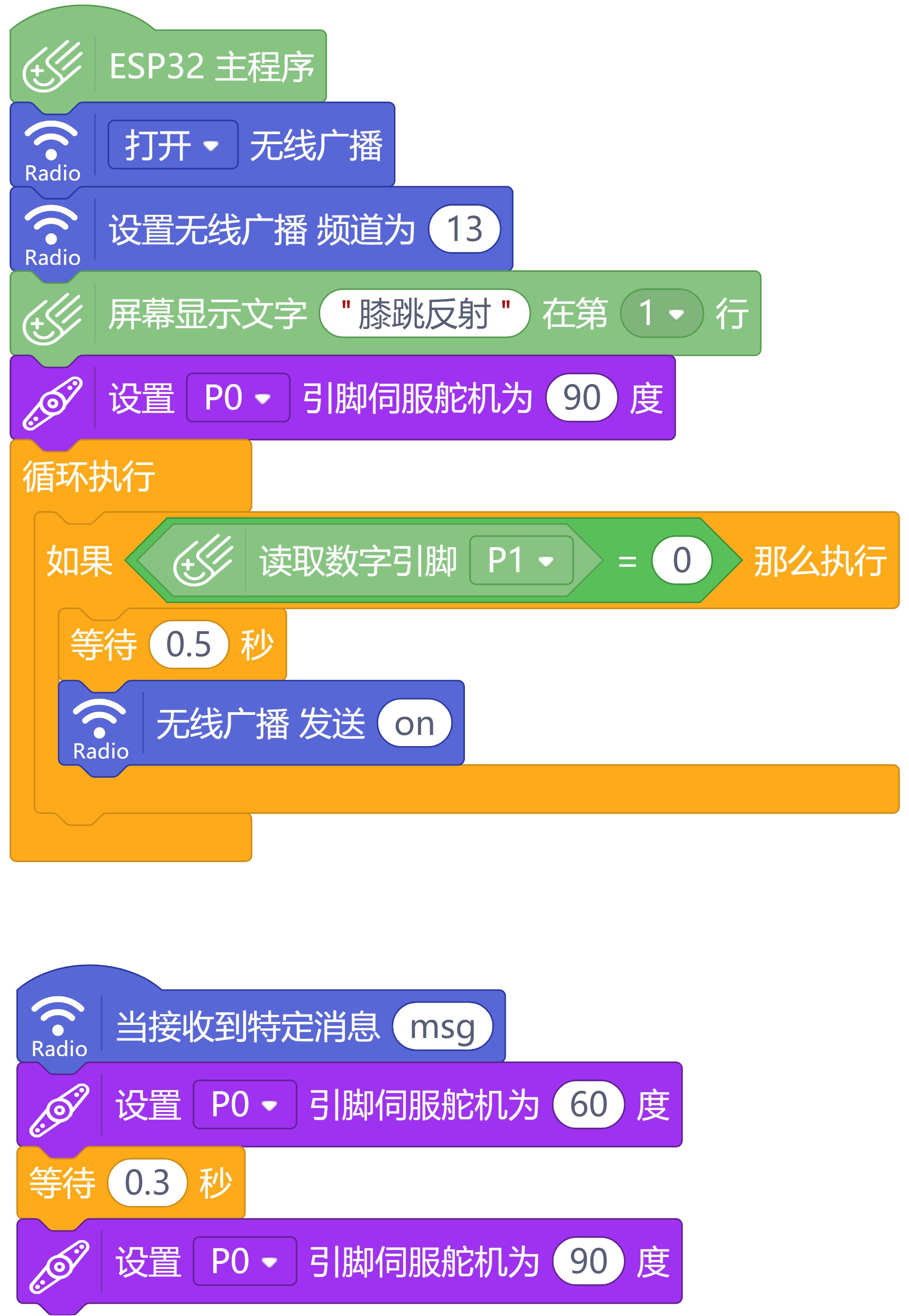
腿部程序:
掌控板+扩展板+舵机+碰撞传感器
舵机接P0口,碰撞传感器接P1口。



当碰撞传感器被叩击,延时,向K10广播消息on。
当接收到K10传来的消息msg,舵机执行膝跳动作。
脊髓程序:
行空板K10+锂电电源模块+W2812 RGB灯40颗
灯带接行空板K10的P0口。


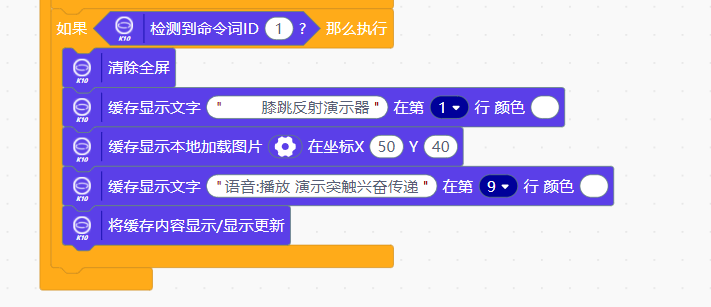
开机初始化:
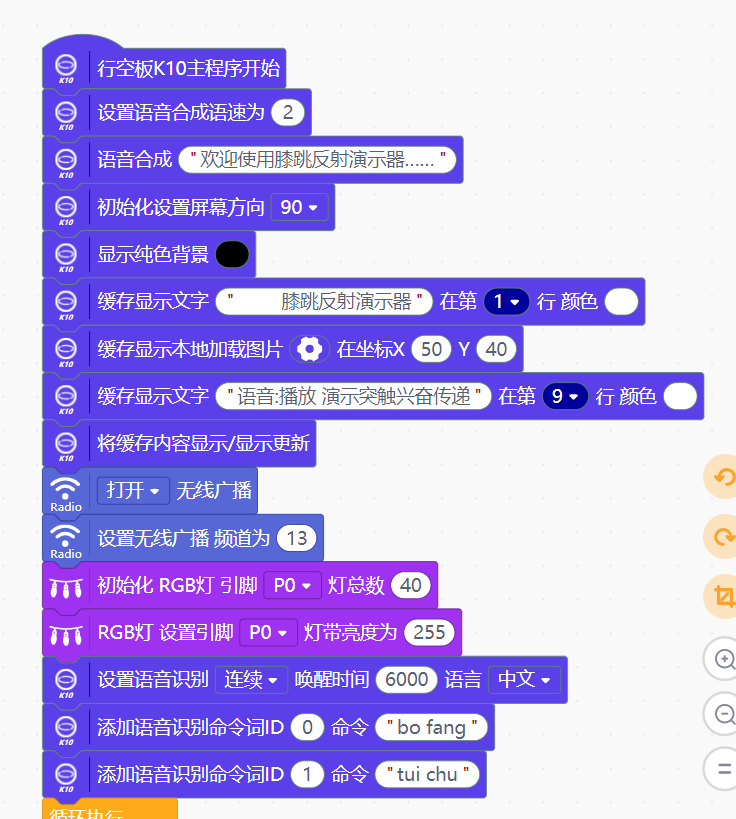
语音内容:欢迎使用膝跳反射演示器,膝跳反射是一种简单的非条件反射。反射的基础是反射弧,反射弧由感受器、传入神经、神经中枢、传出神经、效应器组成。请叩击膝下韧带开始演示。
加载图片:

定义语音识别命令:播放 退出
当识别到语音“播放”时,执行流水灯带和突触兴奋传递动画。
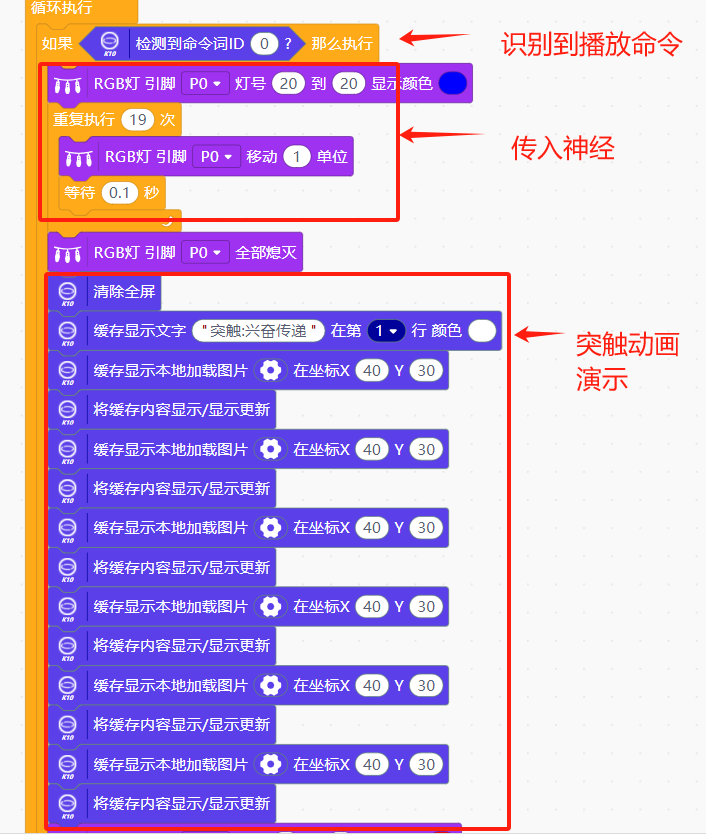
动画设置
当语音识别到”退出“命令时,返回到初始画面。

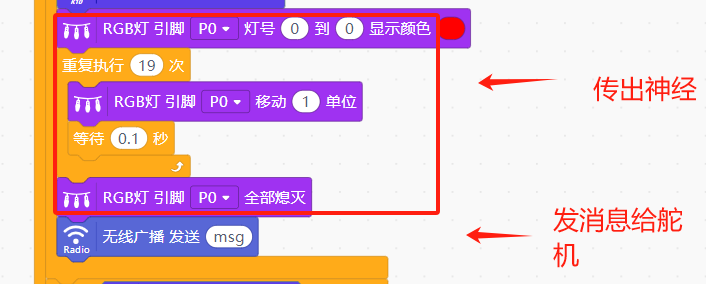
当接收到掌控板发来的消息on时,执行灯带流水灯动作:

完整程序:
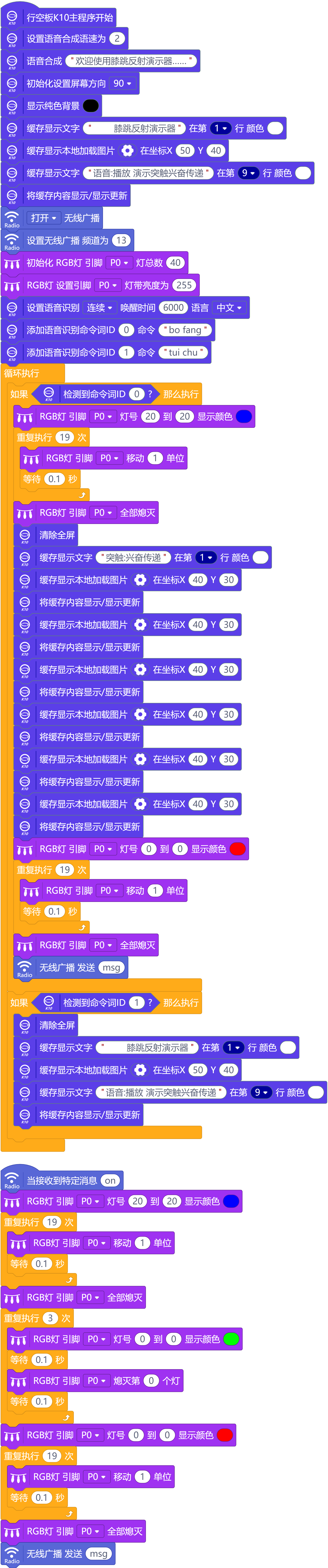
调试通过,达成预设目标。
项目反思:
1、本项目使用K10和掌控板组合,参考课本上膝跳反射的标准图片升级优化了多年做的膝跳反射模型,当时的模型还是比较简易,只能实现模糊的演示。
2、在本次制作中,使用K10和掌控板联动,灯带和舵机独立供电独立控制,较好克服灯带工作时电流变化使舵机产生抖动的问题。
3、本装置中,使用K10屏幕进行动画演示突触前膜和突触后膜间兴奋传递的知识点(高中知识),演示装置可以应用到高中生物课堂。
4、本装置规范了制作材料,详细提供了制作过程,方便其他老师复刻制作,立体化的模型更加与课本图片基本一致,通过演示可以加深学生的课堂印象。
不足之处:
1、因材料经费限制,虽经个人努力,制作还显简陋,本帖子仅作抛砖引玉,复刻的老师可以更加优化。
2、动画演示虽是创意点,但因屏幕较小,展示受众比较有限。
改进方向:
1、尝试两块掌控板完成基本功能。
2、尝试两块micro:bit完成基本功能。
3、尝试行空M10和K10互动完成装置改进。
附件
附件


 他的勋章
他的勋章

罗罗罗2025.12.04
666