 返回首页
返回首页
 回到顶部
回到顶部

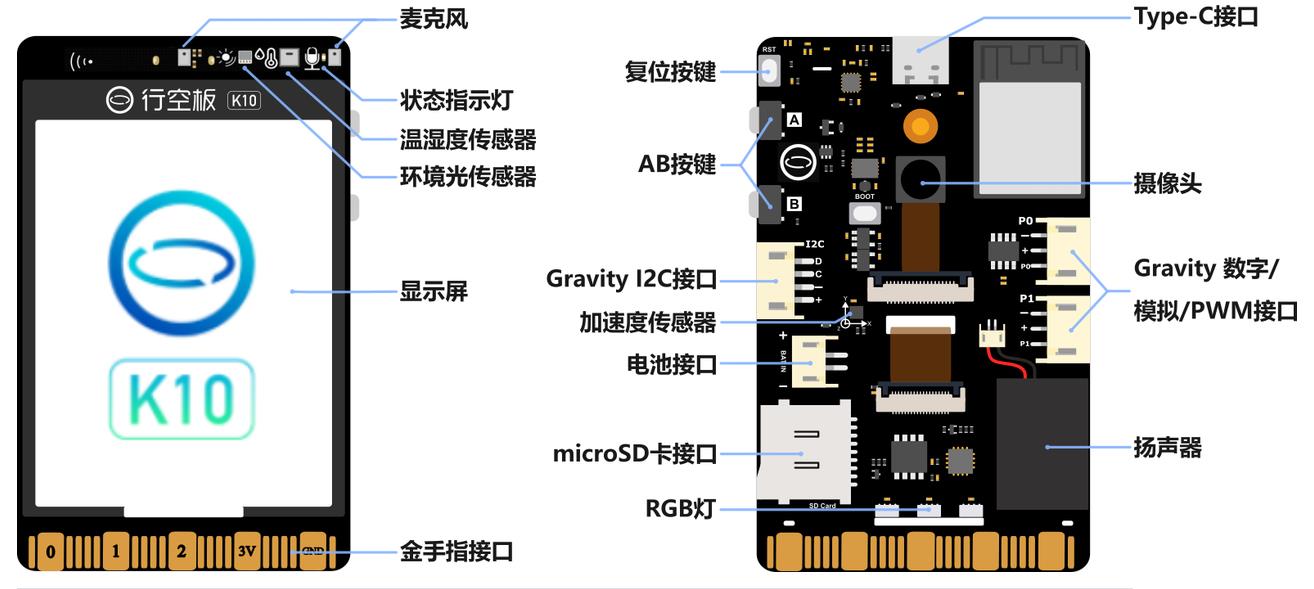
行空板K10是一款专为快速体验物联网和学习人工智能而设计的开发学习板,100%采用国产芯片,知识产权自主可控,符合信息科技课程中编程学习、物联网及人工智能等教学需求。该板集成2.8寸LCD彩屏、WiFi蓝牙、摄像头、麦克风、扬声器、RGB指示灯、多种传感器及丰富的扩展接口。凭借高度集成的板载资源,教学过程中无需额外连接其他设备,便可轻松实现传感器控制、物联网应用以及人脸识别、语音识别、语音合成等AI人工智能项目。
主要特点
集成摄像头&内置算法,可进行离线图像检测
集成麦克风&内置算法,可进行离线语音识别
集成扬声器&内置算法,可进行离线语音合成
2.8寸彩色屏幕,数据展示更清晰
集成度高,利于教学
接口丰富,兼容软件多,扩展性好
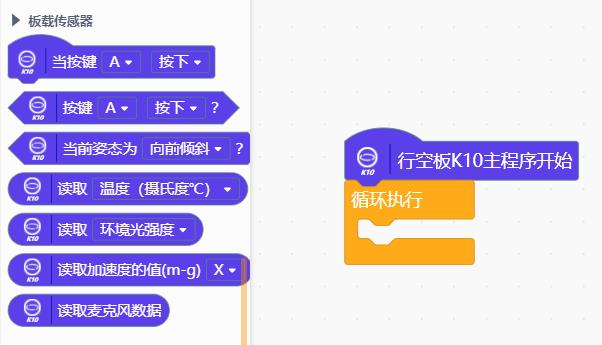
板载传感器相关积木
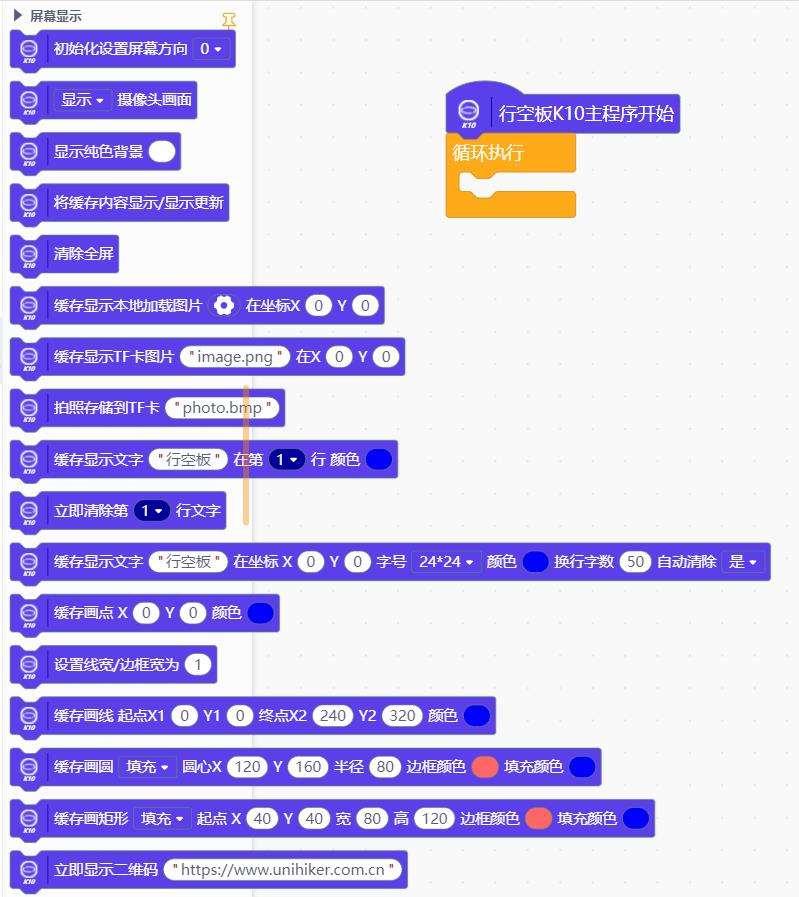
辅助:屏幕显示相关积木
板载传感器之麦克风与积木说明
【花雕学编程】行空板K10系列实验之动态读取麦克风数据值并控制板载LED灯
实验开源代码
#include "unihiker_k10.h" // 引入 UNIHIKER_K10 行空板K10库
// 创建对象
UNIHIKER_K10 k10; // 创建 UNIHIKER_K10 对象 行空板k10
uint8_t screen_dir = 2; // 定义屏幕方向变量,并初始化为2
// 主程序开始
void setup() {
k10.begin(); // 初始化 k10 对象
k10.initScreen(screen_dir); // 初始化屏幕方向
k10.creatCanvas(); // 创建画布
k10.rgb->write(-1, 0x000000); // 将板载LED灯初始化为关闭状态(黑色)
}
void loop() {
delay(500); // 延迟500毫秒
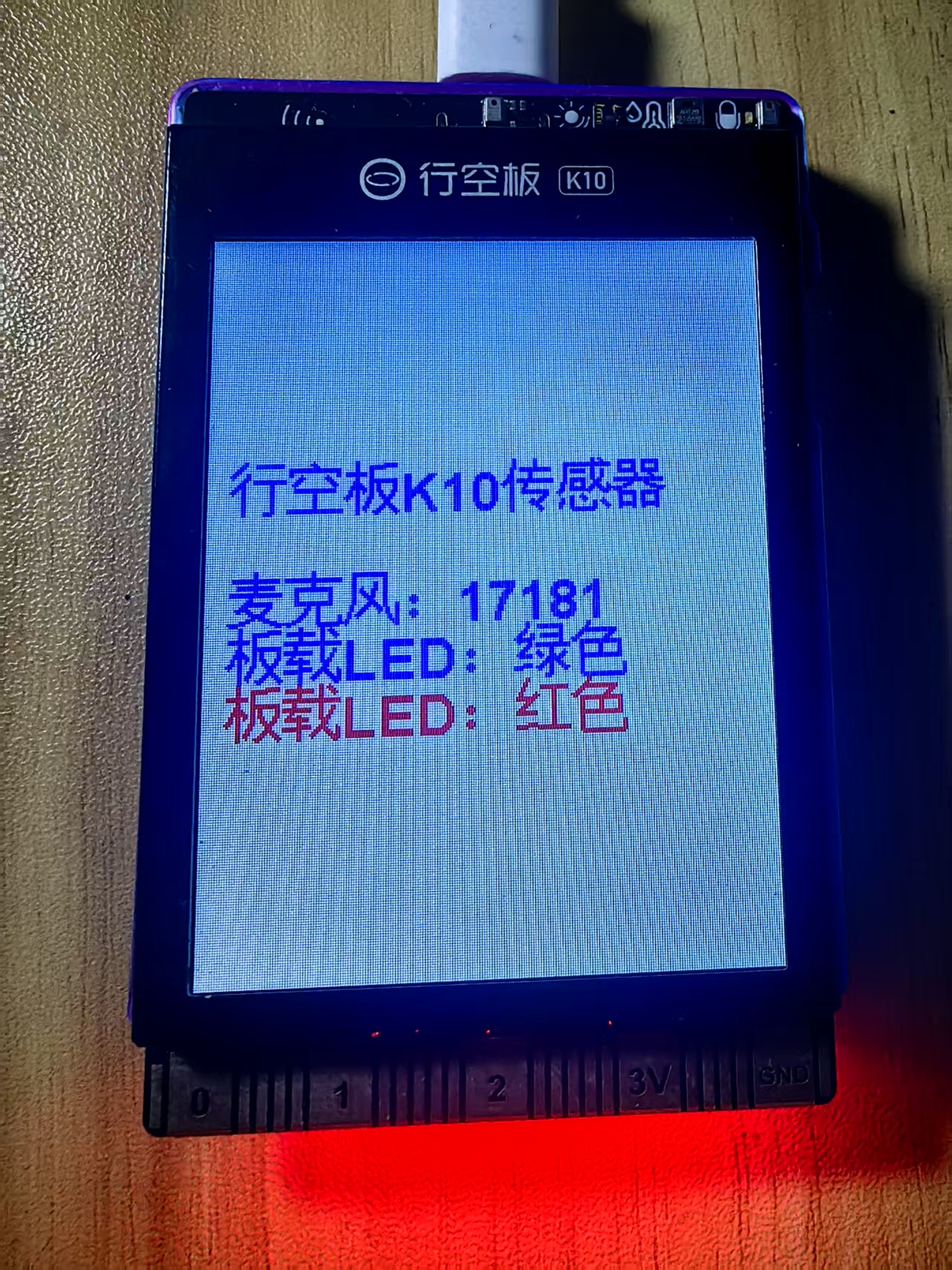
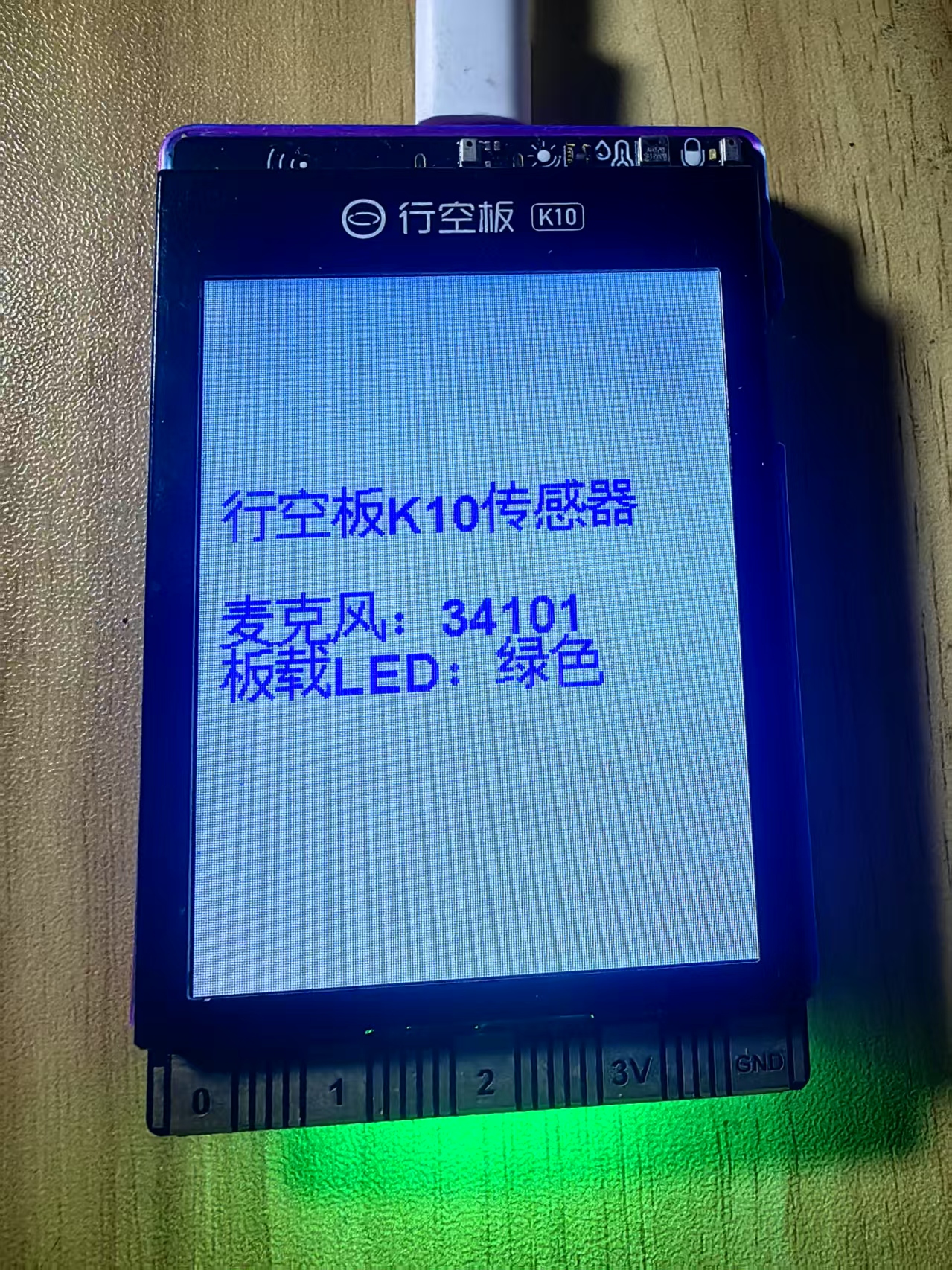
k10.canvas->canvasText("行空板K10传感器", 5, 0x0000FF); // 在画布上显示文本 "行空板K10传感器",字体大小为5,颜色为蓝色 (0x0000FF)
k10.canvas->canvasText((String("麦克风:") + String(k10.readMICData())), 7, 0x0000FF); // 在画布上显示麦克风数据,字体大小为7,颜色为蓝色 (0x0000FF)
k10.canvas->canvasText("板载LED:绿色", 8, 0x0000FF); // 在画布上显示文本 "板载LED:绿色",字体大小为8,颜色为蓝色 (0x0000FF)
k10.canvas->updateCanvas(); // 更新画布
k10.rgb->write(-1, 0x00FF00); // 将板载LED灯设置为绿色
k10.canvas->canvasClear(9); // 清除画布上第9行的内容
if (k10.readMICData() > 30000) { // 如果麦克风数据超过30000
k10.canvas->canvasText("板载LED:红色", 9, 0xFF0000); // 在画布上显示文本 "板载LED:红色",字体大小为9,颜色为红色 (0xFF0000)
k10.canvas->updateCanvas(); // 更新画布
k10.rgb->write(-1, 0x000000); // 将板载LED灯关闭(黑色)
k10.rgb->write(-1, 0xFF0000); // 将板载LED灯设置为红色
k10.canvas->canvasClear(8); // 清除画布上第8行的内容
delay(1000); // 延迟1秒
}
}代码解读
1、初始化:
UNIHIKER_K10 k10;:创建一个 UNIHIKER_K10 对象 k10。
uint8_t screen_dir = 2;:定义屏幕方向变量 screen_dir 并初始化为2。
k10.begin();:初始化 k10 对象。
k10.initScreen(screen_dir);:根据 screen_dir 初始化屏幕方向。
k10.creatCanvas();:创建一个画布。
k10.rgb->write(-1, 0x000000);:将板载LED灯初始化为关闭状态(黑色)。
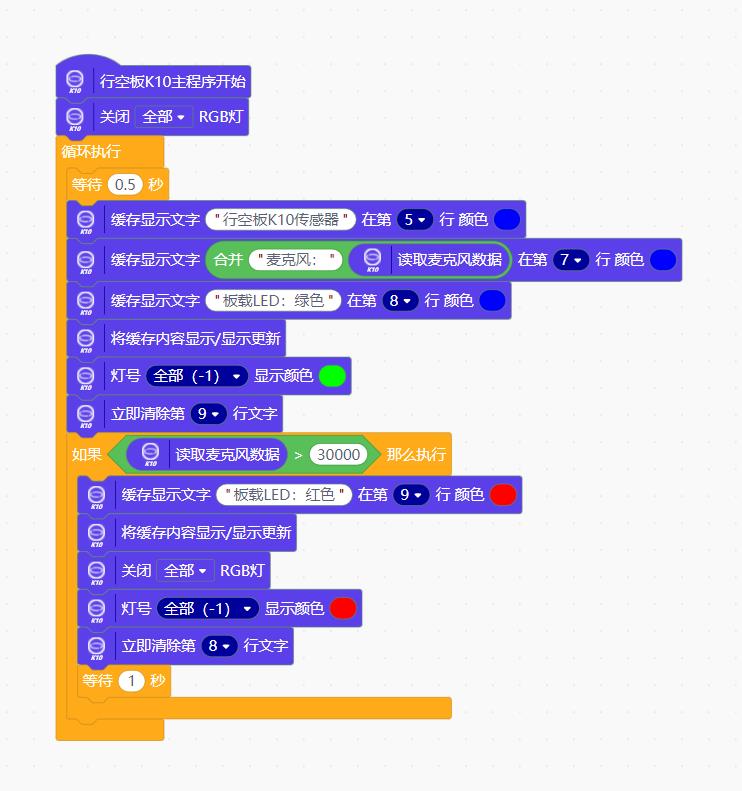
2、主循环:
每次循环延迟500毫秒。
在画布上显示文本 "行空板K10传感器",字体大小为5,颜色为蓝色 (0x0000FF)。
在画布上显示麦克风数据,字体大小为7,颜色为蓝色 (0x0000FF)。
在画布上显示文本 "板载LED:绿色",字体大小为8,颜色为蓝色 (0x0000FF)。
更新画布以显示最新内容。
将板载LED灯设置为绿色。
清除画布上第9行的内容。
如果麦克风数据超过30000:
在画布上显示文本 "板载LED:红色",字体大小为9,颜色为红色 (0xFF0000)。
更新画布以显示最新内容。
将板载LED灯关闭(黑色)。
将板载LED灯设置为红色。
清除画布上第8行的内容。
延迟1秒。
这些代码实现了通过 UNIHIKER_K10 获取麦克风数据并根据数据变化控制LED灯的功能。
Mind+图形编程
实验场景图 动态图

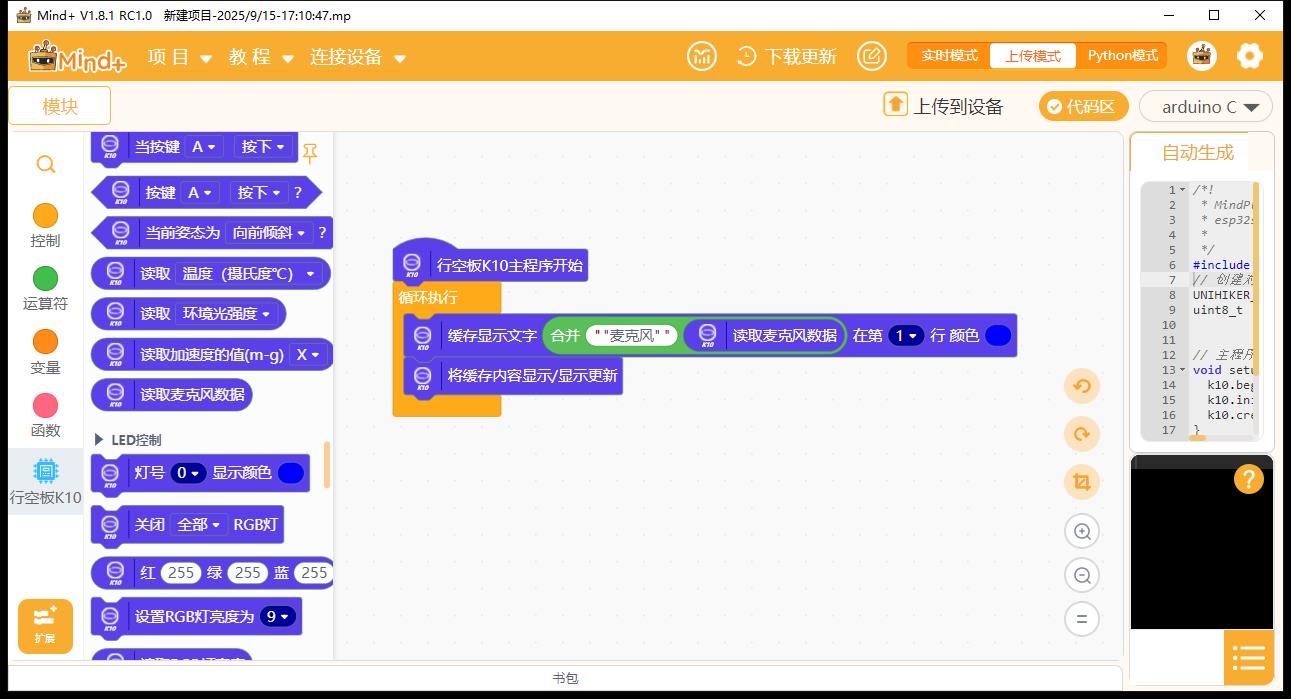
刚打开Mind+,上传模式,硬件选择行空板K10,在板载传感器里面,确定有读取麦克风数据的积木,请见最后一张图。


 他的勋章
他的勋章

齐燕2025.09.15
代码适用于M10.K10没有麦克风声音强度的积木,V1.8.1 RC1.0版本看过了一样没有。
驴友花雕2025.09.15
刚打开Mind+,上传模式,硬件选择行空板K10,在板载传感器里面,确定有读取麦克风数据的积木,请见最后一张图。
何小强2025.05.29
我换了好几个版本,都没找到这个麦克风声音强度的积木。我们有个想法需要获取环境噪声值,所以现在特别想解决这个问题。 我在论坛里发了个帖子: https://mc.dfrobot.com.cn/thread-330051-1-1.html#lastpost
驴友花雕2025.05.30
好的,我会去跟帖,回复
驴友花雕2025.05.30
各种办法都试试看 1、原来的删掉,重新安装 2、尝试不同的电脑版本(比如换成W10) 3、试试其他的电脑(用别人的电脑看看)
驴友花雕2025.06.02
可以了吗?
何小强2025.05.26
刚买不久,就跟着教程尝试了一下,还不怎么熟悉。 结果一上来就被这个声音强度给卡住了
驴友花雕2025.05.27
请看文章最后一张,我刚发的截图,确定V1.8.1 RC1.0有这个积木,也能使用,估计是你动手太少,经验不多,最好多做实验,多写博客多发帖子多交流,哥们加油哦
何小强2025.05.25
我尝试了很多版本,包括v1.8.1 RC10,都没找到这个积木。可惜这儿不能截图。 看来不是软件版本的问题,难道是操作系统?我这儿是win10
何小强2025.05.25
是“上传模式”,然后"扩展"选择“行空板K10”吧?
驴友花雕2025.05.25
K10 行空板的实验做过几项了?有空写点实验博客,记录性的就行,也便于分享与交流。
何小强2025.05.24
问题还没解决 装了好几个版本的mind+,要么不支持k10,要么支持k10但没有读取麦克风数据的积木。 在论坛也问了,没有回复。看来这个行空板的社团生态太差了。它更适合作为教学工具,真要用来做点啥东西不太靠谱。
驴友花雕2025.05.25
不会啊,这里生态比预料的好,是指官方生态
驴友花雕2025.05.25
我的实验是在V1.8.1 RC1.0版本上做的
何小强2025.05.23
Mind+从V1.7.2 RC3.0版本开始在Python模式中加入了对行空板的支持。。。 https://www.unihiker.com.cn/wiki/m10/mindplus
驴友花雕2025.05.24
你的问题解决了吗?
何小强2025.05.22
您可以帮忙看看么?我安装的是最新版本V1.8.1 RC2.0,在“板载传感器”这组里面只有6个积木,并没有“读取麦克风数据”。
驴友花雕2025.05.23
你好,我刚才看了,1.0版本有,重新下载
何小强2025.05.21
请问您是什么版本的呢?为啥我找不到“取麦克风数据”这个积木呢?
驴友花雕2025.05.22
标准版本啊