 返回首页
返回首页
 回到顶部
回到顶部

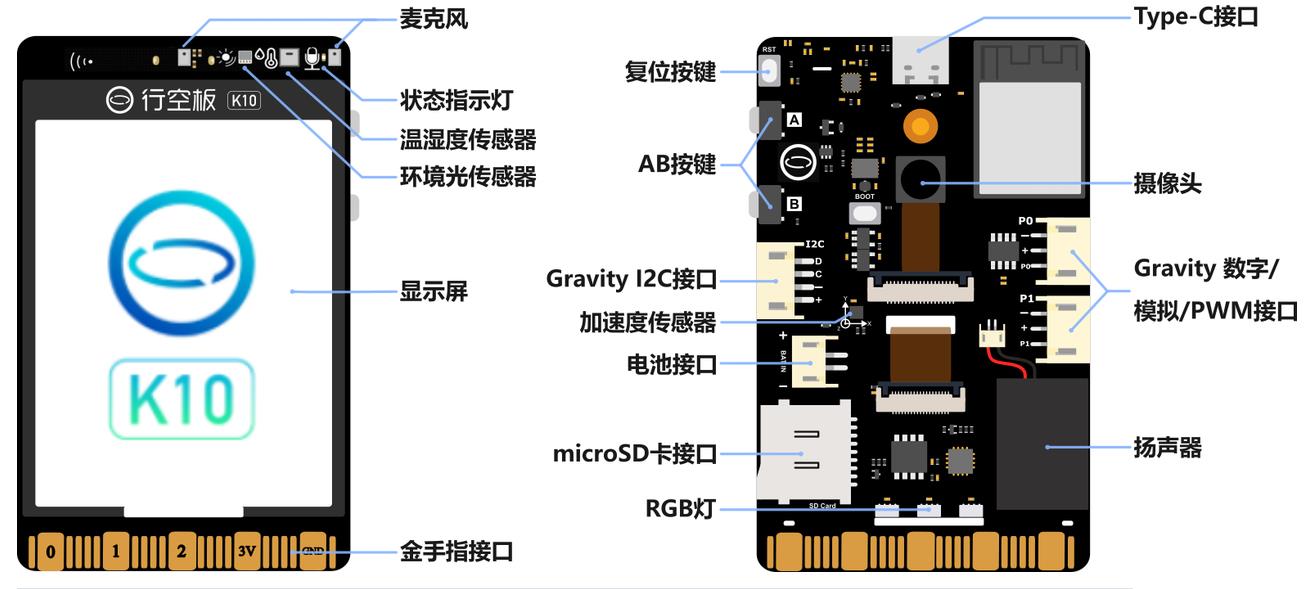
行空板K10是一款专为快速体验物联网和学习人工智能而设计的开发学习板,100%采用国产芯片,知识产权自主可控,符合信息科技课程中编程学习、物联网及人工智能等教学需求。该板集成2.8寸LCD彩屏、WiFi蓝牙、摄像头、麦克风、扬声器、RGB指示灯、多种传感器及丰富的扩展接口。凭借高度集成的板载资源,教学过程中无需额外连接其他设备,便可轻松实现传感器控制、物联网应用以及人脸识别、语音识别、语音合成等AI人工智能项目。
主要特点
集成摄像头&内置算法,可进行离线图像检测
集成麦克风&内置算法,可进行离线语音识别
集成扬声器&内置算法,可进行离线语音合成
2.8寸彩色屏幕,数据展示更清晰
集成度高,利于教学
接口丰富,兼容软件多,扩展性好
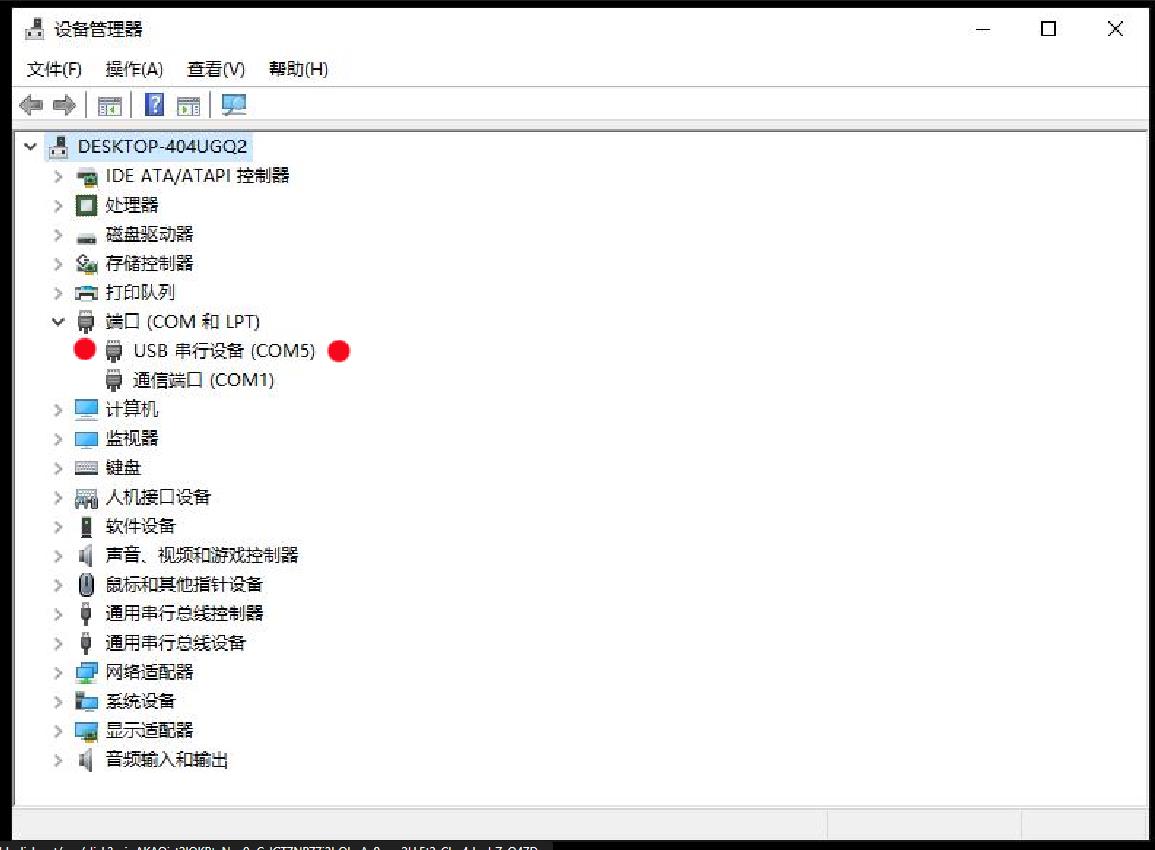
1、安装驱动
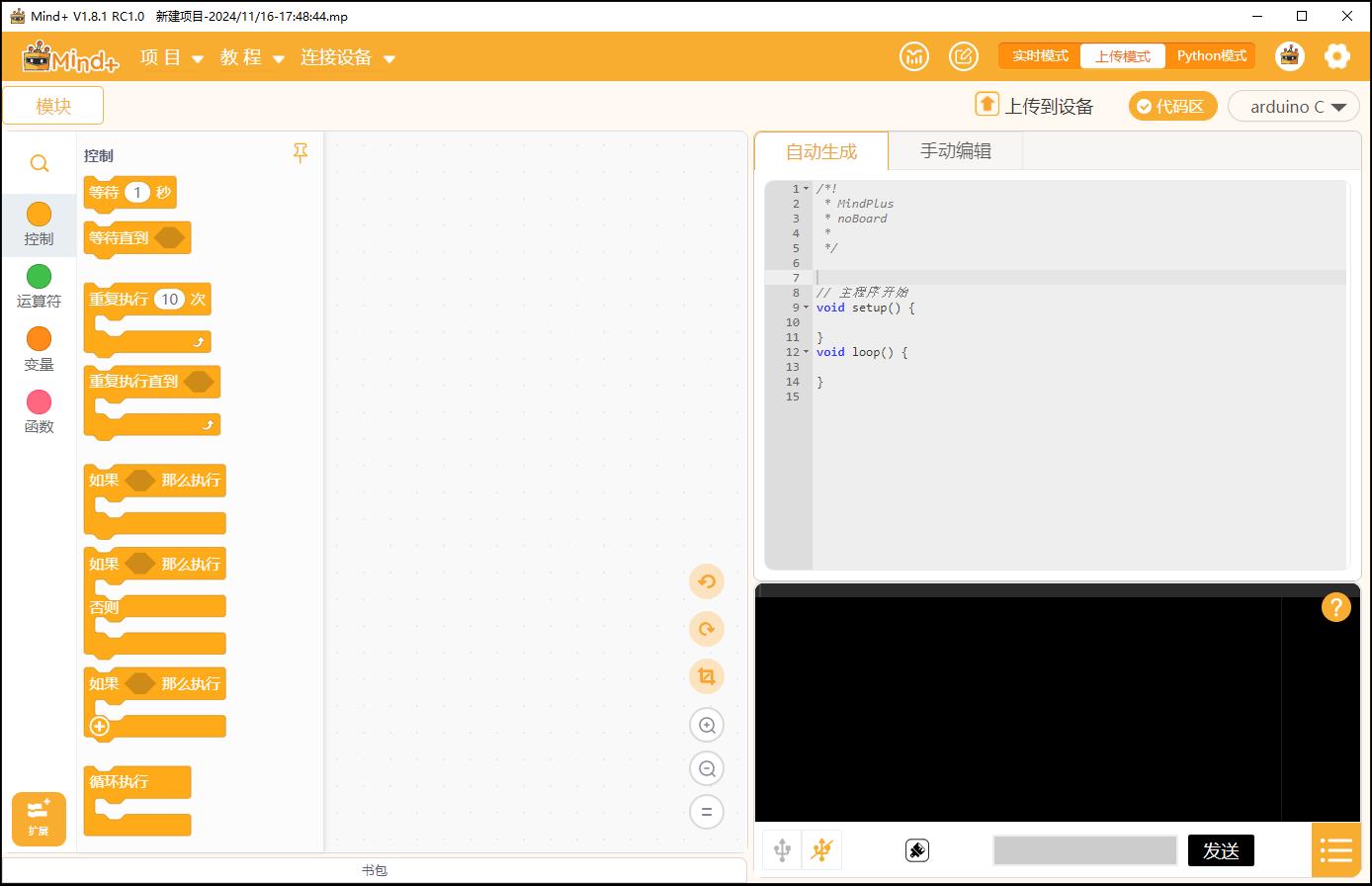
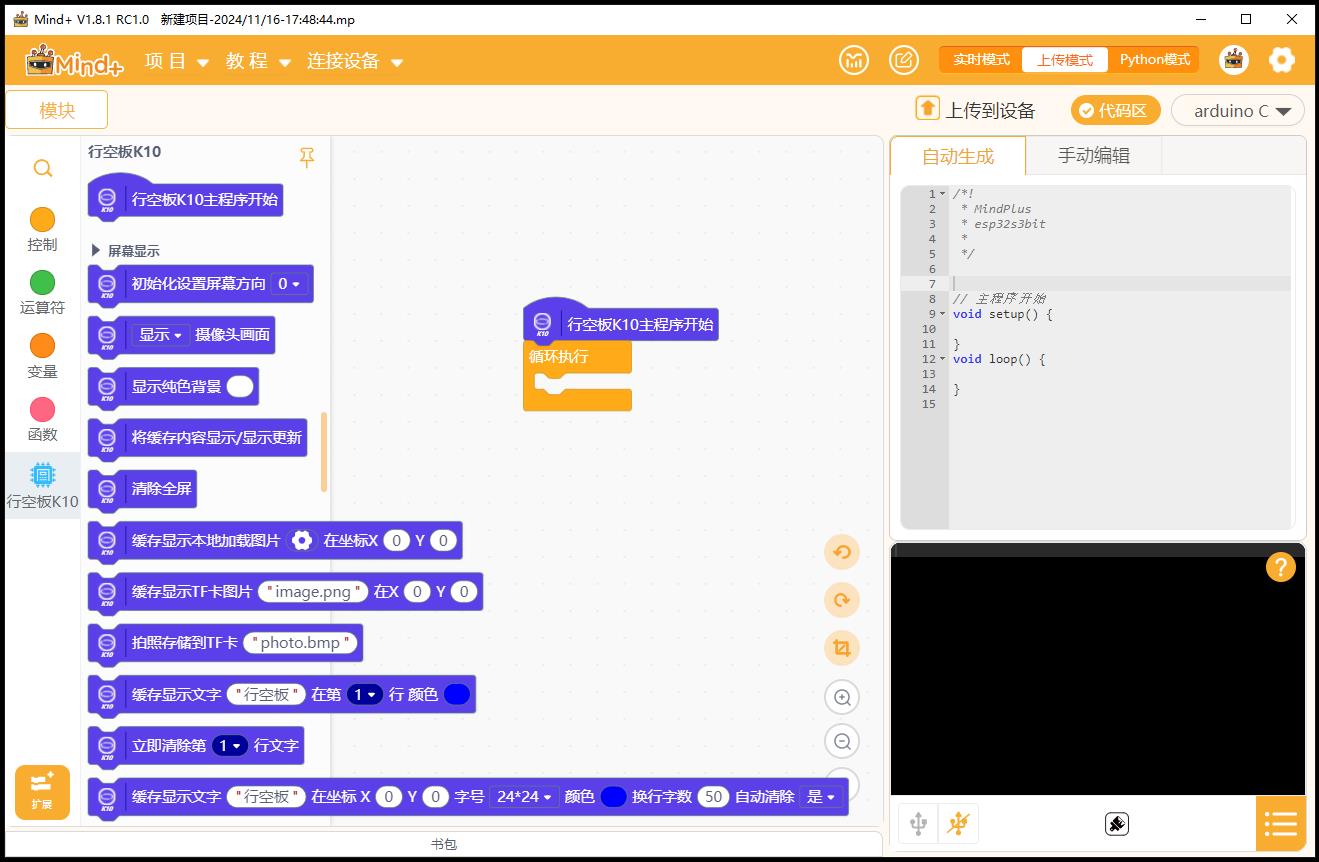
三、打开Mind+
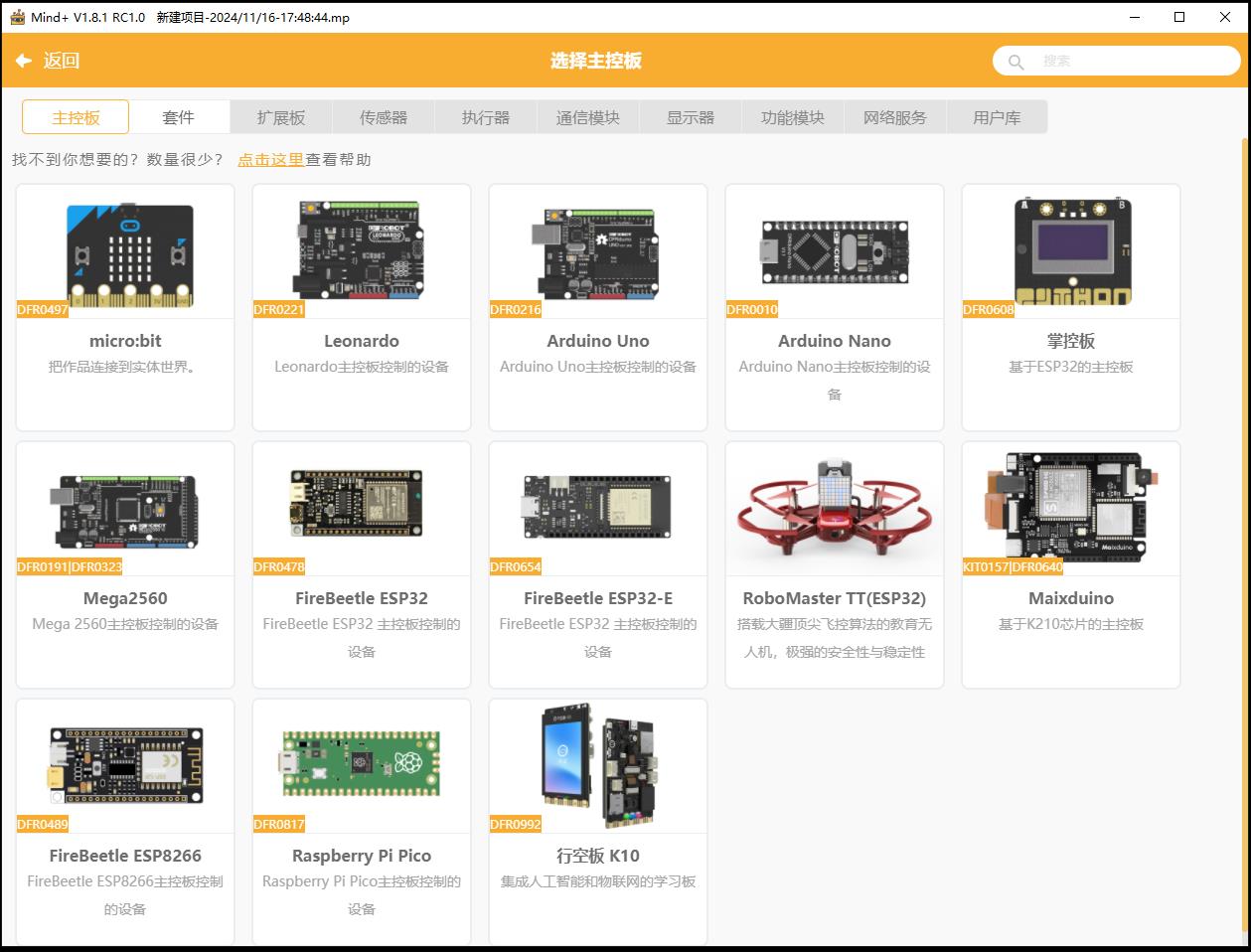
四、打开扩展,选择行空板K10
五、Mind+图形化编程开发环境
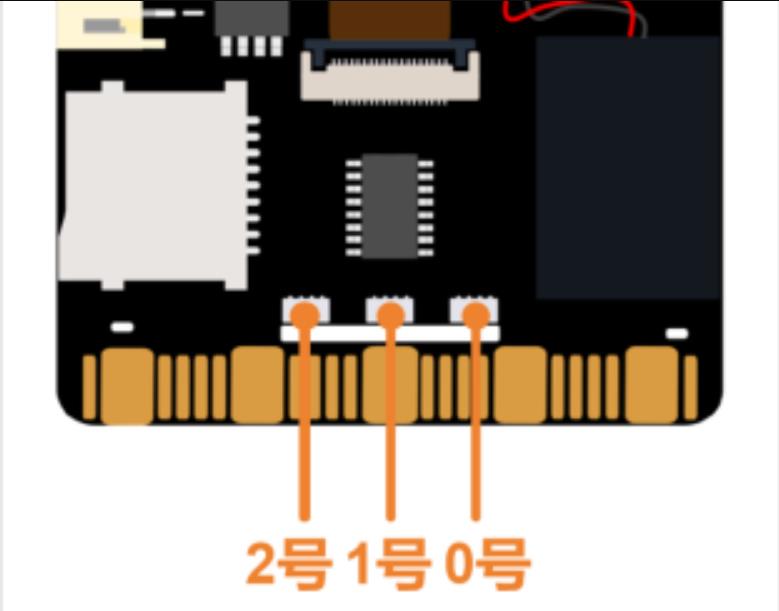
六、点亮板载RGB LED
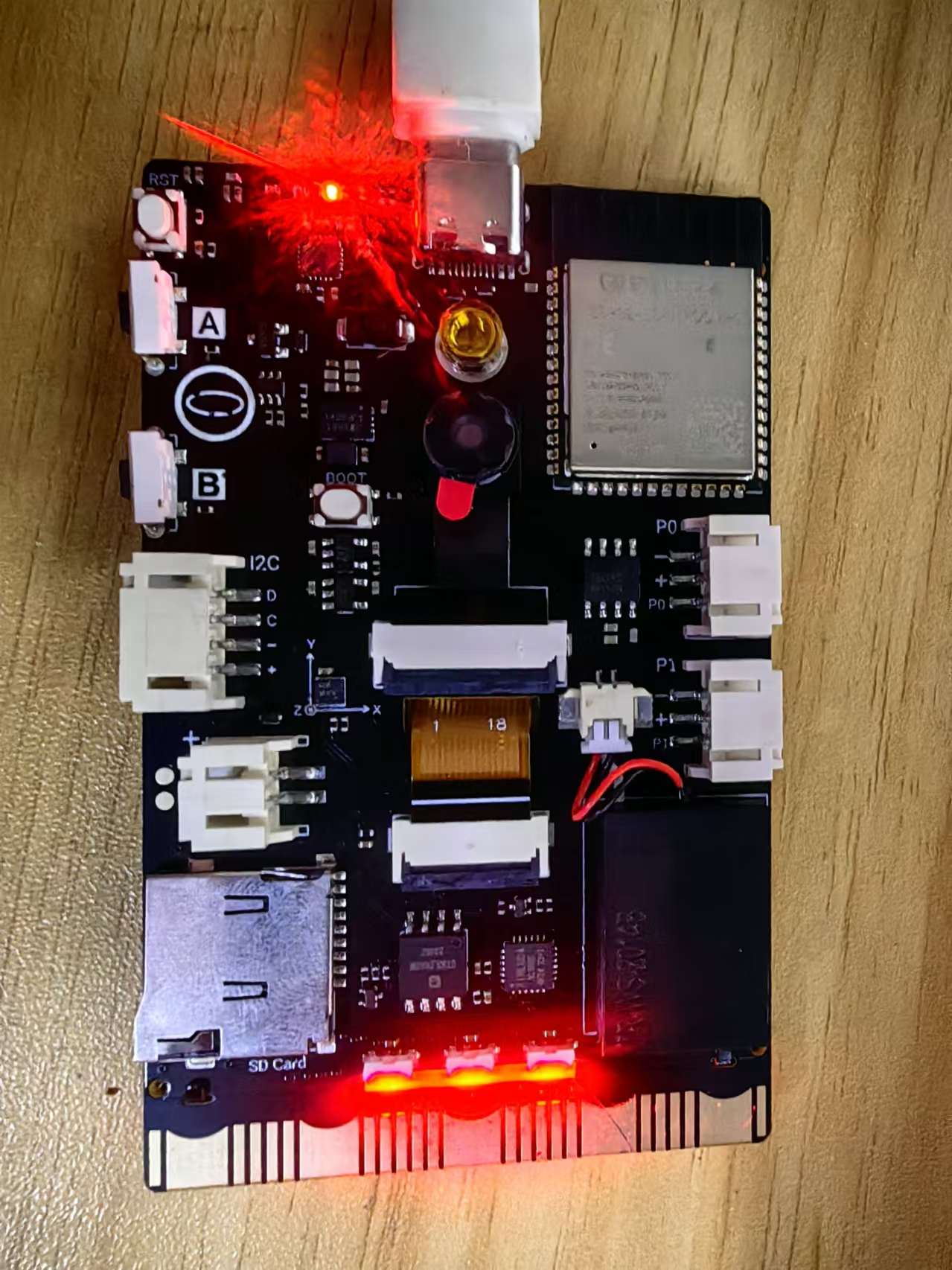
主控板背面下方有三颗RGB LED灯,使用序号来指定要控制的RGB LED灯。
相关RGB LED控制图形积木

最简单的点灯程序

可惜无法烧录
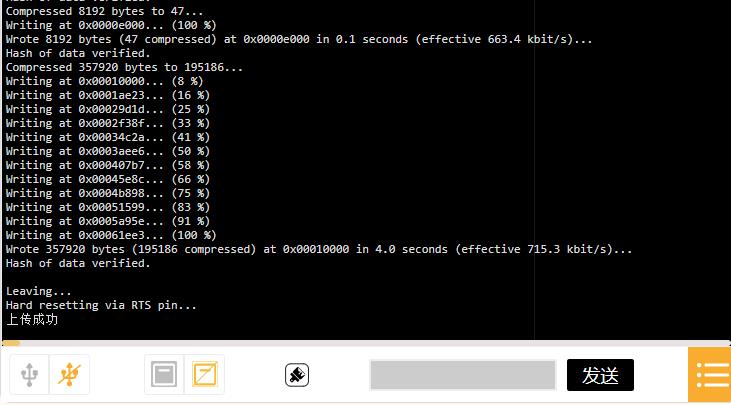
后来把下载后的行空板K10公测版Mind+,放到C盘根目录下,就能上传了
实验串口返回情况
实验场景图

板载灯程序之二

Arduino实验代码
代码
#include "unihiker_k10.h"
// 创建对象
UNIHIKER_K10 k10;
// 主程序开始
void setup() {
k10.begin();
k10.rgb->brightness(round(2));
}
void loop() {
k10.rgb->write(0, 0xFF0000);
k10.rgb->write(1, 0x0000FF);
k10.rgb->write(2, 0x00FF00);
delay(1000);
k10.rgb->write(0, 0x00FFFF);
k10.rgb->write(1, 0xFF0000);
k10.rgb->write(2, 0x0000FF);
delay(1000);
k10.rgb->write(0, 0x0000FF);
k10.rgb->write(1, 0x00FFFF);
k10.rgb->write(2, 0xFF0000);
delay(1000);
}实验场景图 动态图
实验场景图 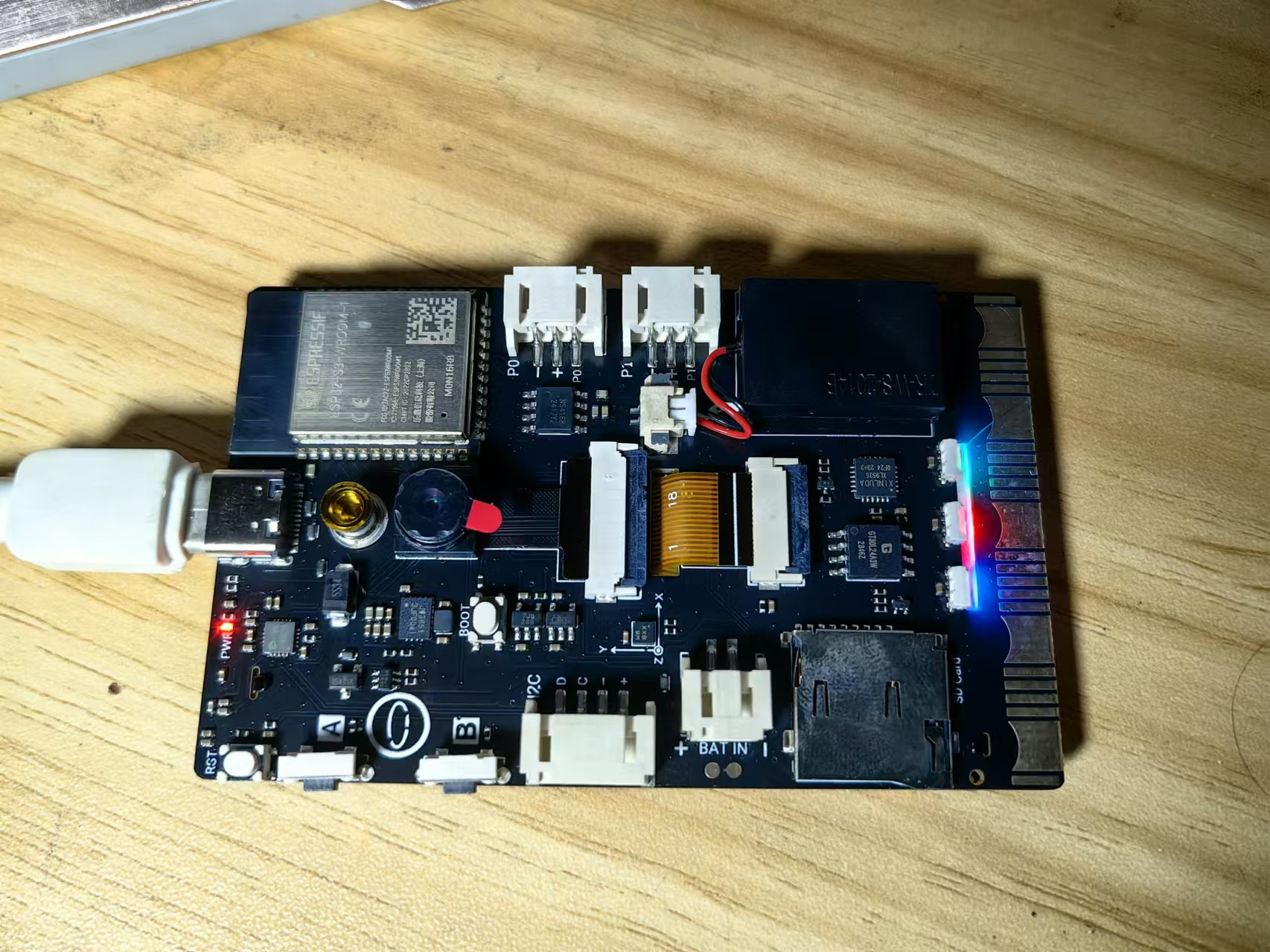


 他的勋章
他的勋章

评论