 返回首页
返回首页
 回到顶部
回到顶部
第十三章 蜂鸣器实验
本章实验将介绍如何使用CanMV让Kendryte K210控制板载的蜂鸣器发声。通过本章的学习,读者将学习到在CanMV下控制Kendryte K210的GPIO输出高低电平。
本章分为如下几个小节:
13.1 maix.GPIO模块介绍
13.2 硬件设计
13.3 程序设计
13.4 运行验证
13.1 maix.GPIO模块介绍
有关maix.GPIO模块的介绍,请见第12.1小节《maix.GPIO模块介绍》。
13.2 硬件设计
13.2.1 例程功能
1. 控制板载蜂鸣器间歇发生
13.2.2 硬件资源
1. 蜂鸣器 - IO17
13.2.3 原理图
本章实验内容,需要控制板载蜂鸣器发声,正点原子DNK210开发板上蜂鸣器的连接原理图,如下图所示:

图13.2.3.1 蜂鸣器连接原理图
通过以上原理图可以看出,蜂鸣器的发声与否由IO17控制,当IO17输出低电平时,蜂鸣器不发声,当IO17输出高电平时,蜂鸣器发声。
13.3 程序设计
13.3.1 maix.GPIO模块
有关maix.GPIO模块的介绍,请见第13.1小节《maix.GPIO模块介绍》。
13.3.2 程序流程图
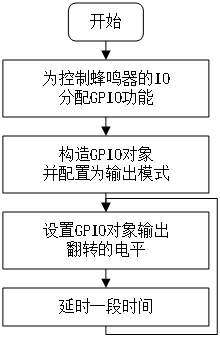
图13.3.2.1 蜂鸣器实验流程图
13.3.3 main.py代码
main.py中的脚本代码如下所示:
from board import board_info
from fpioa_manager import fm
from maix import GPIO
import time
# 为蜂鸣器连接的IO注册GPIO功能
fm.register(board_info.BEEP, fm.fpioa.GPIO2)
# 构造GPIO对象
beep = GPIO(GPIO.GPIO2, GPIO.OUT)
while True:
# 设置GPIO对象输出对应的高低电平
beep.value(0)
time.sleep_ms(1000)
beep.value(1)
time.sleep_ms(1000)
可以看到,首先通过fm.register()方法为控制蜂鸣器的IO分别分配了GPIO2的功能,然后通过GPIO构造函数构造了GPIO对象,并配置为输出模式,最后在一个循环中设置这个GPIO对象输出依次输出高低电平并延时一段时间,从而应该能听到板载的蜂鸣器间歇地发声。
13.4 运行验证
将DNK210开发板连接CanMV IDE,并点击CanMV IDE上的“开始(运行脚本)”按钮后,可以听到板载的蜂鸣器间歇地发声,这与理论推断的结果一致。



 他的勋章
他的勋章


评论