 返回首页
返回首页
 回到顶部
回到顶部
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来——小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
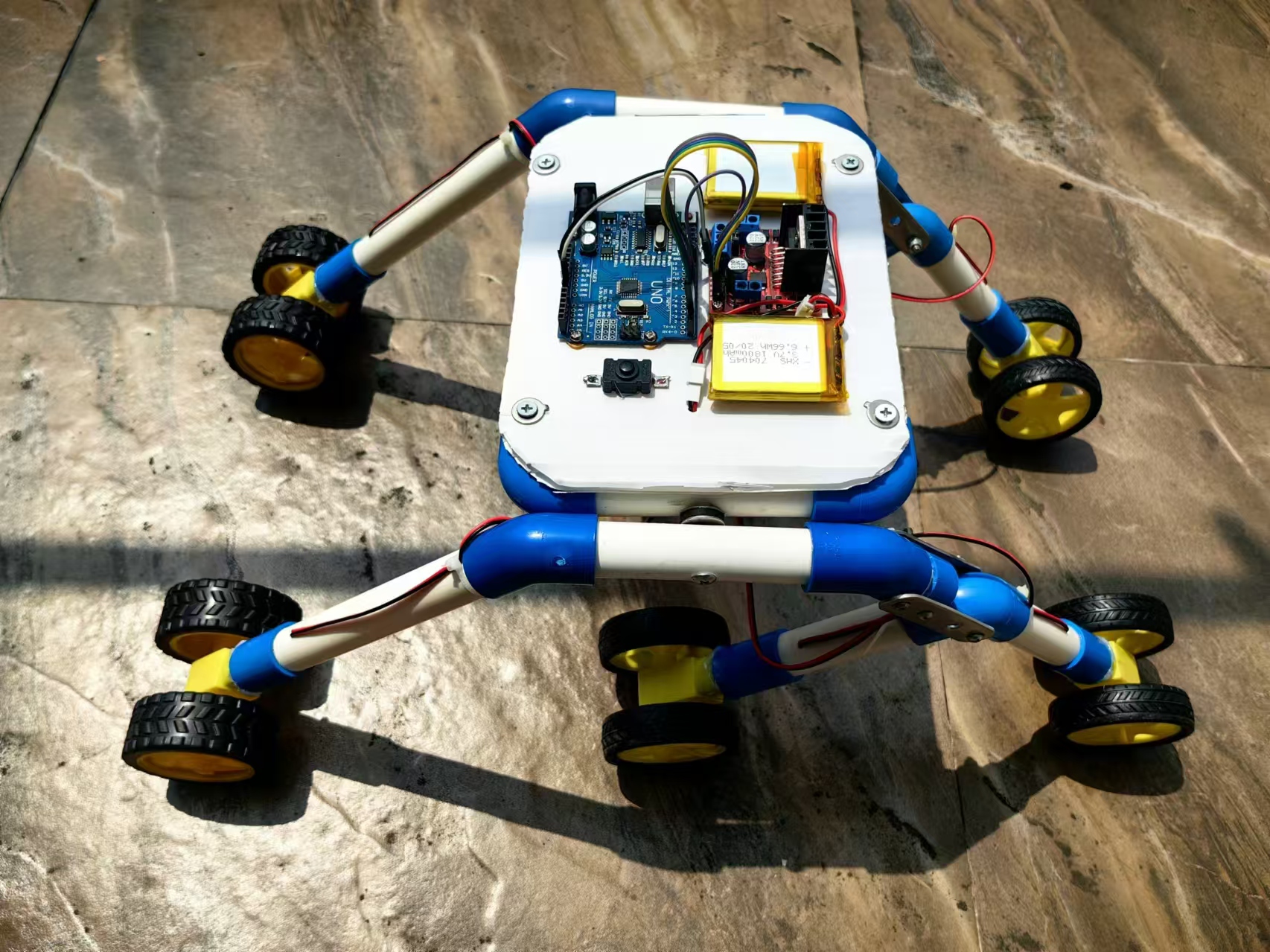
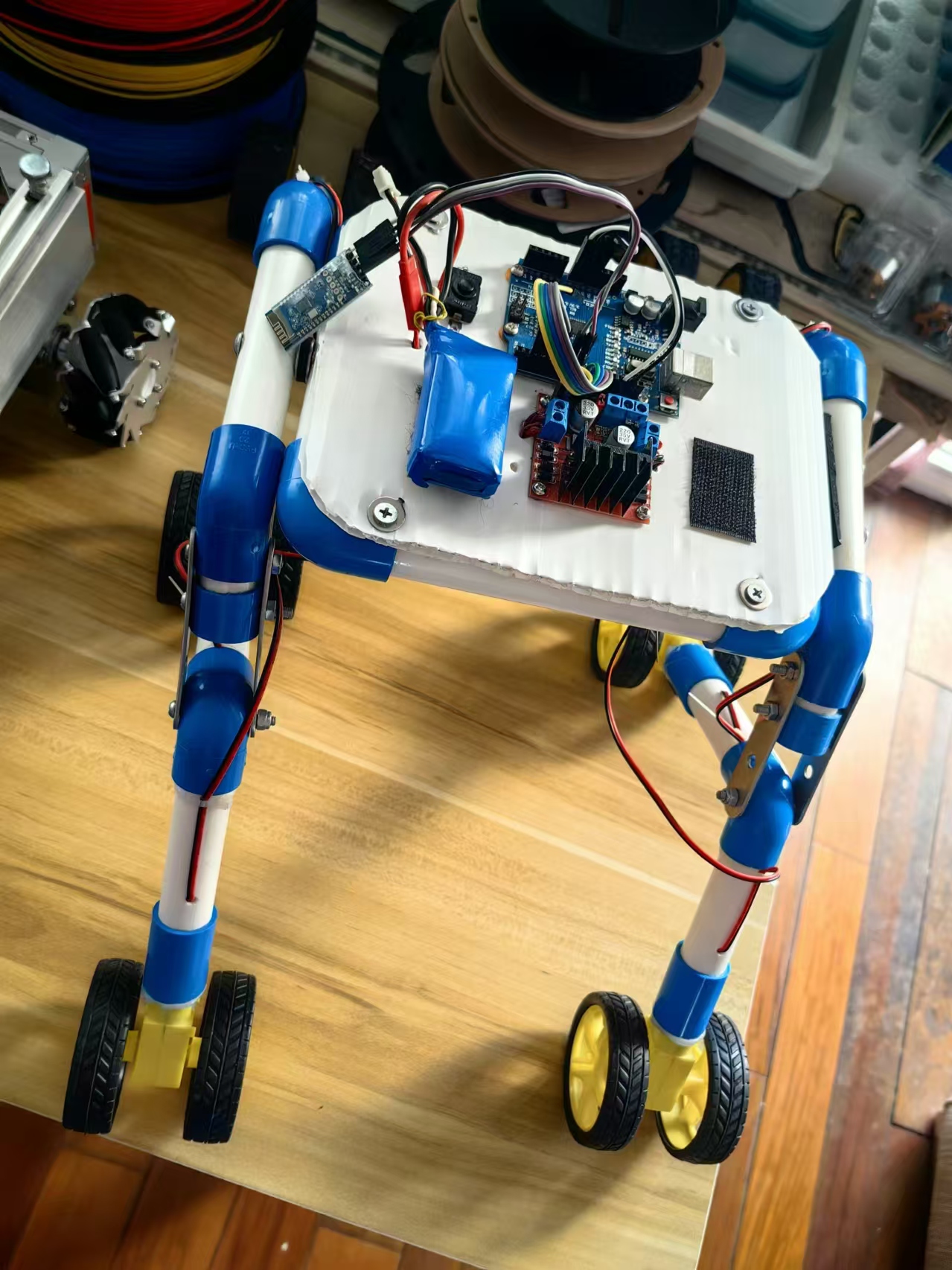
实验二百二十八:2米PVC水管六个TT马达驱动火星车

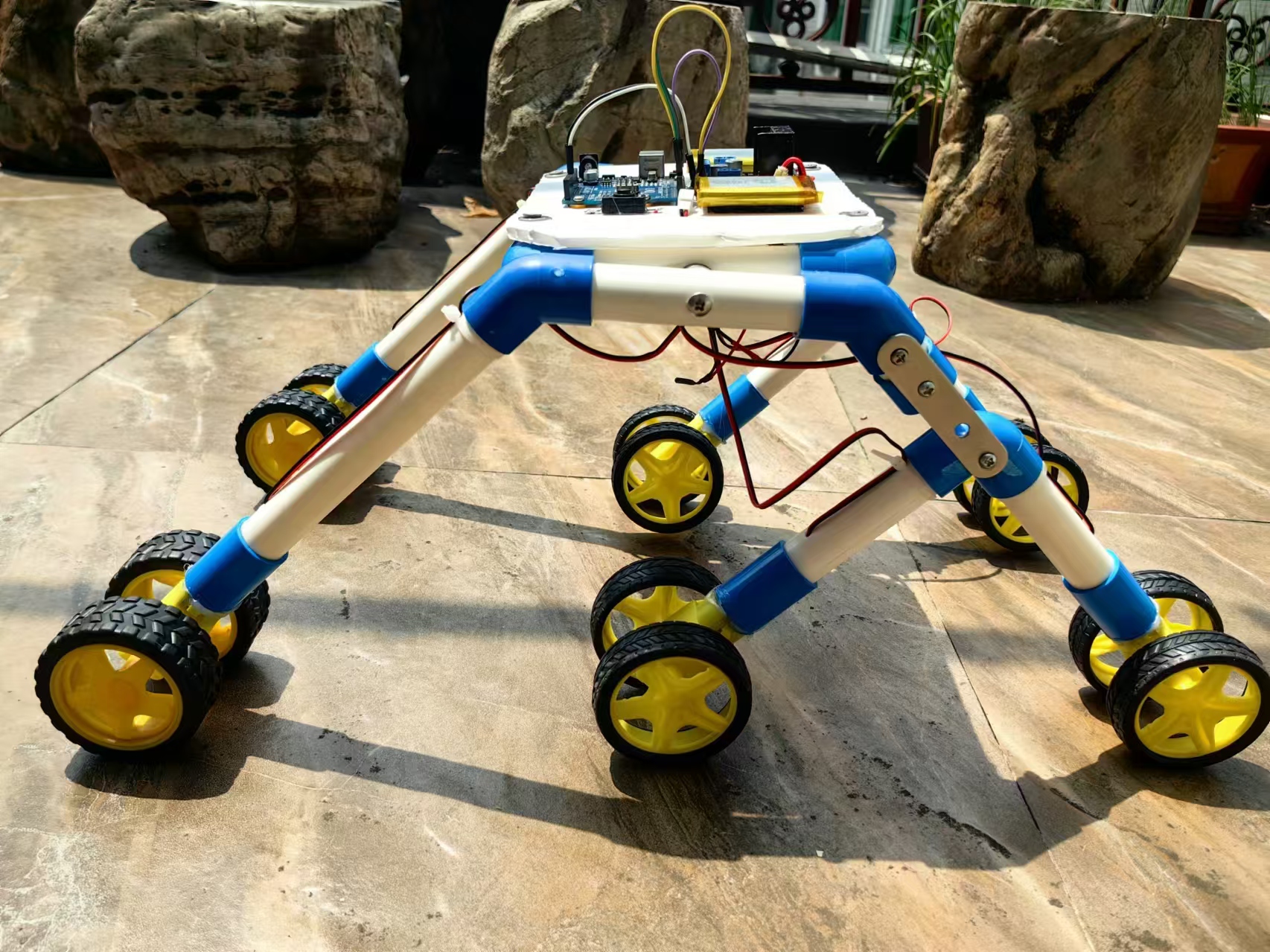
使用外径20mm的PVC水管,还有各种接口与三通,尝试做个越野版火星车,没想到用了二米长的水管子。


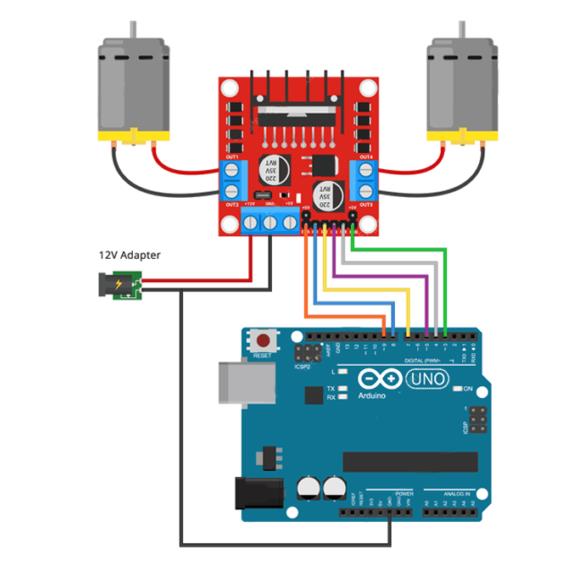
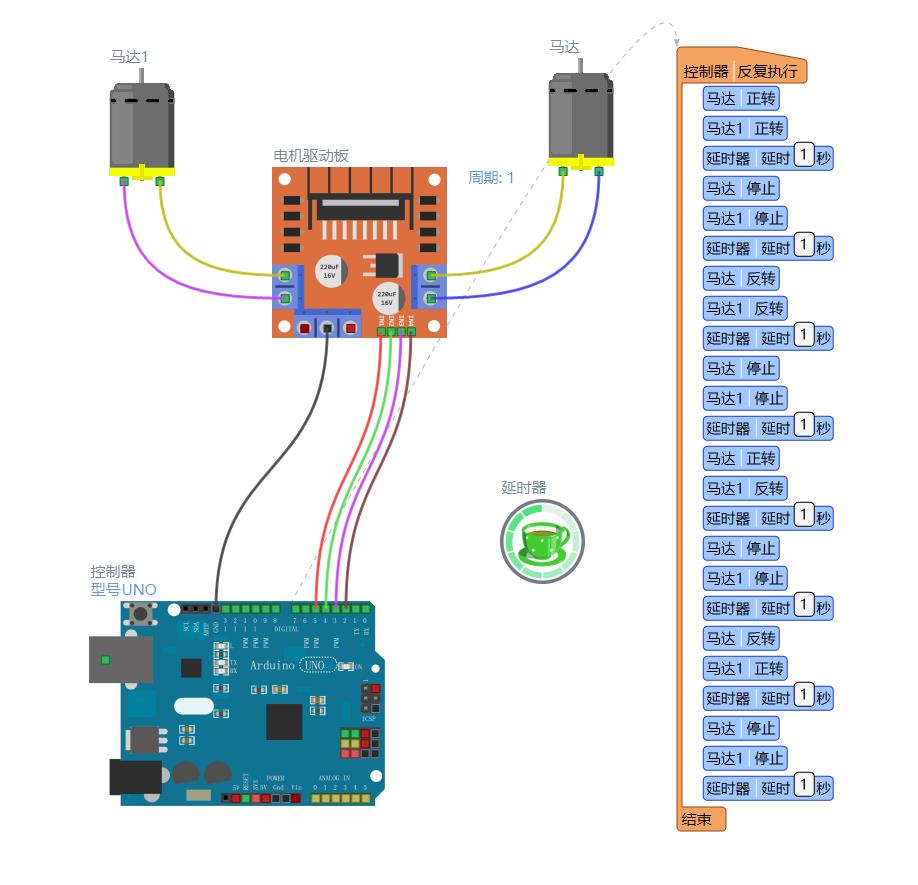
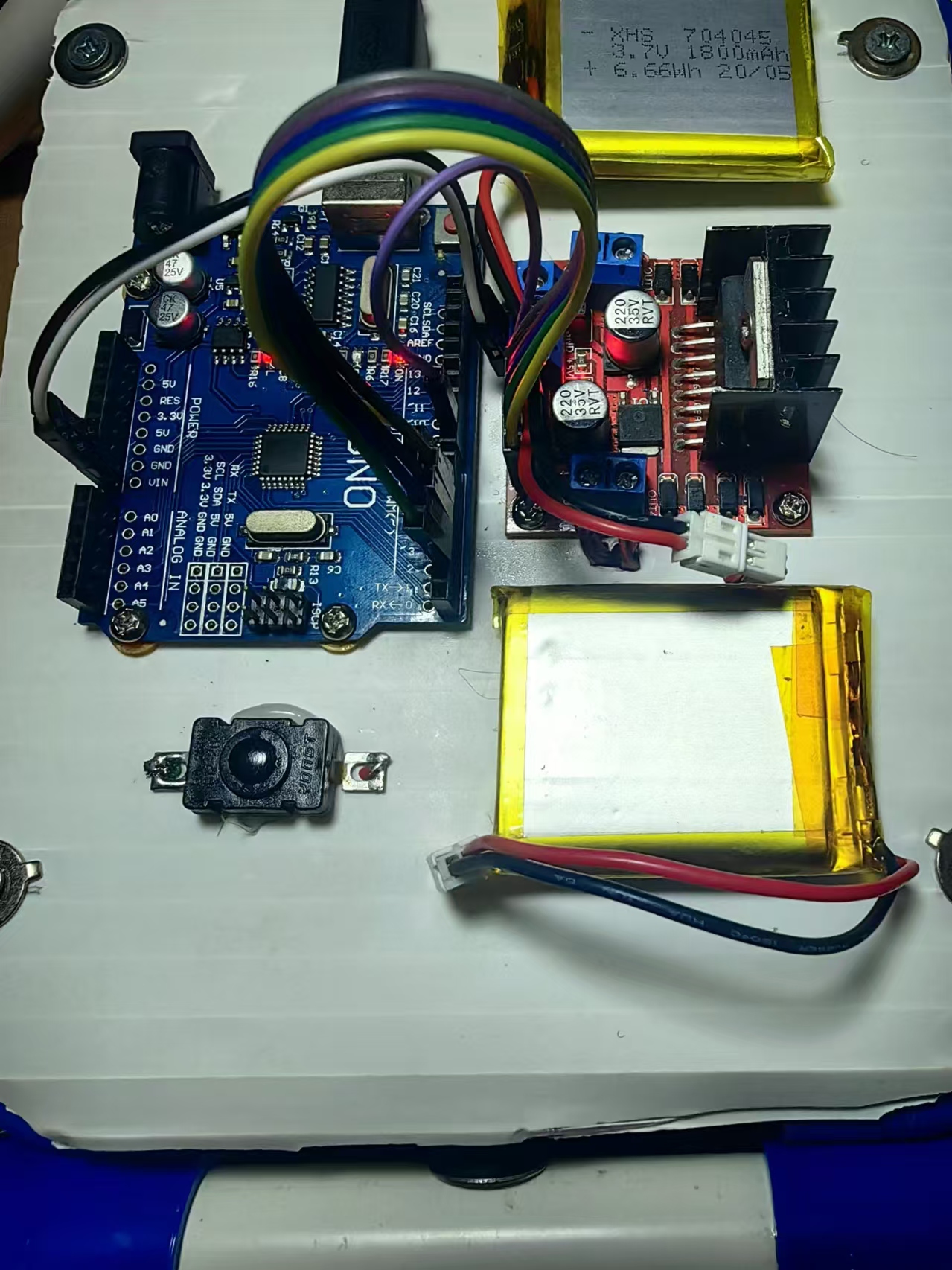
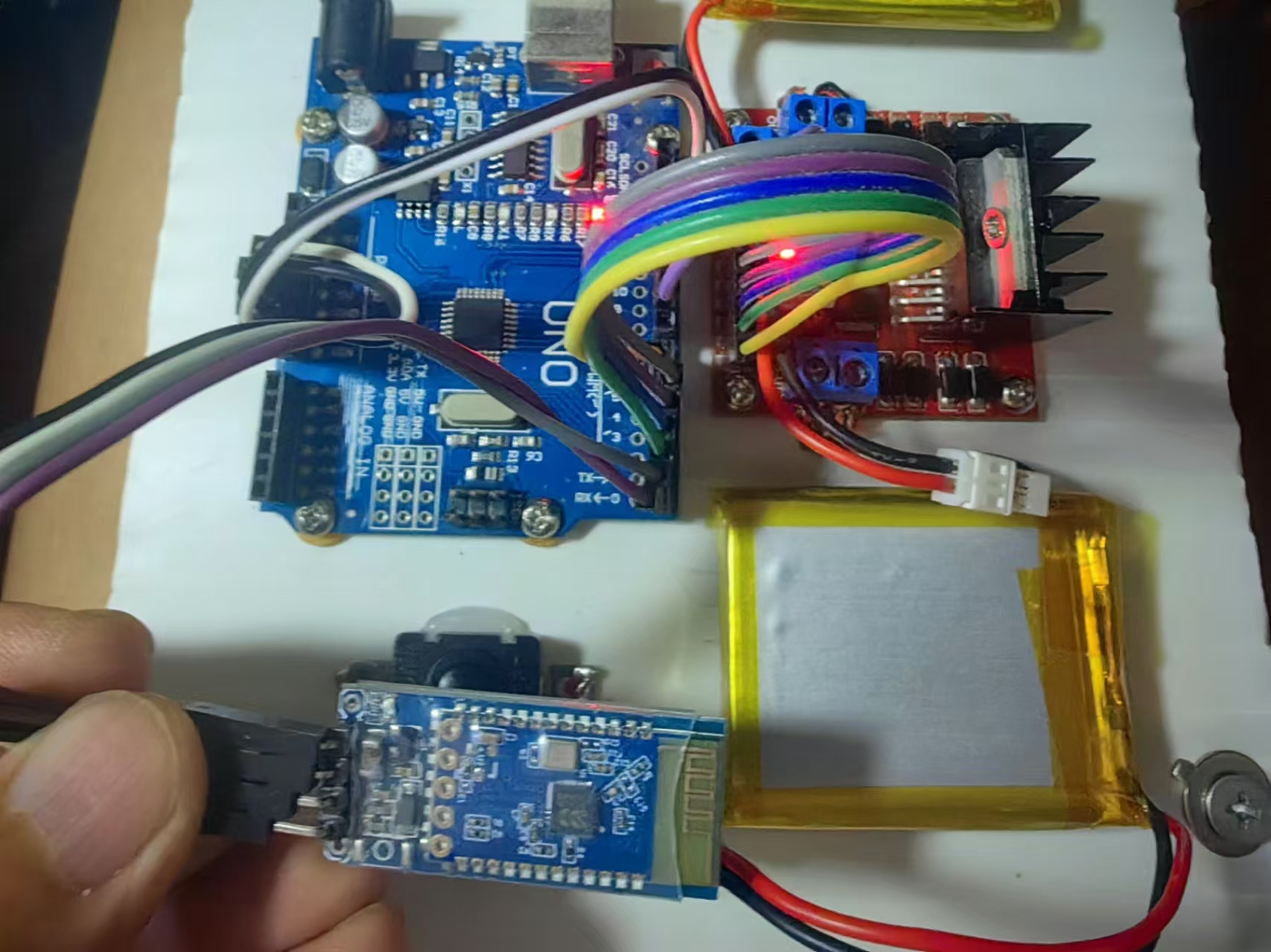
实验模块接线示意图
打开Arduino IDE,点开工具——管理库——搜索“L298N”——安装库

【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
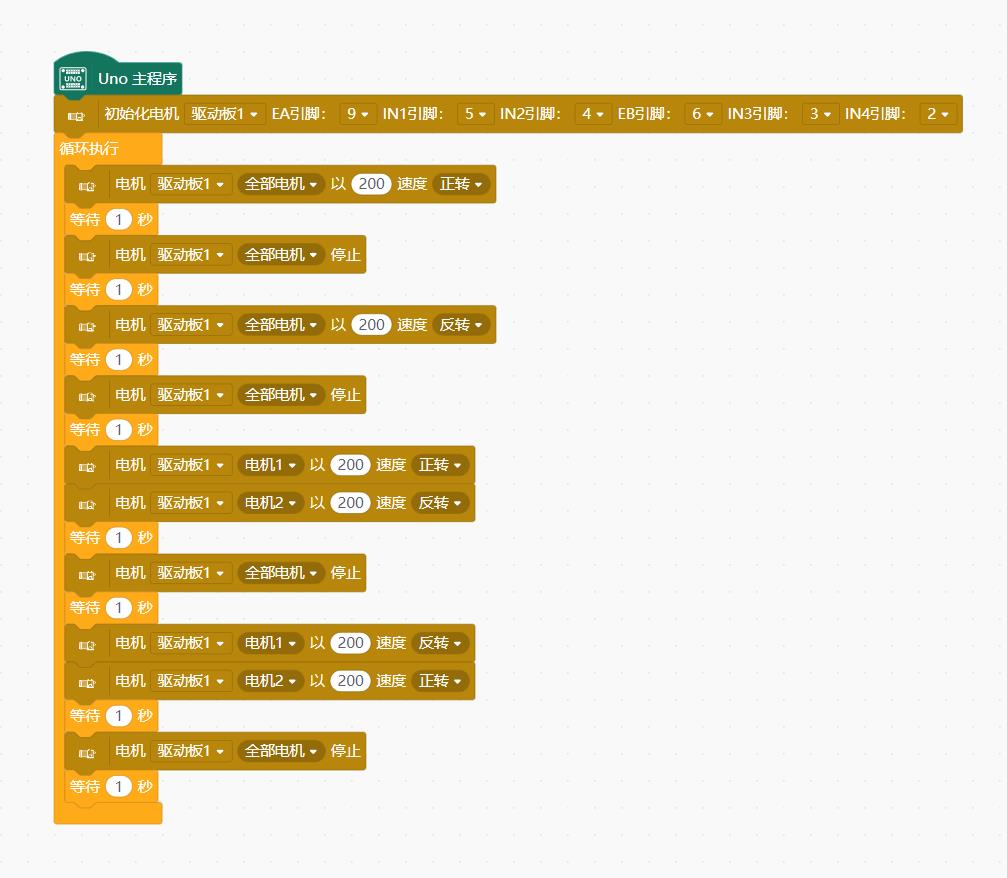
项目实验之一:火星车的前进、后退与转向
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之一:火星车的前进、后退与转向
*/
#include <L298N.h>
// 创建对象
L298N motor1(9, 5, 4); // 第一个电机(并接右侧三个TT马达)
L298N motor2(6, 3, 2); // 第二个电机(并接左侧三个TT马达)
// 主程序开始
void setup() {
// 初始化电机
motor1.setSpeed(0);
motor2.setSpeed(0);
}
void loop() {
// 前进:M1和M2正转
motor1.setSpeed(200);
motor1.forward();
motor2.setSpeed(200);
motor2.forward();
delay(1000);
motor1.stop();
motor2.stop();
delay(1000);
// 后腿:M1和M2反转
motor1.setSpeed(200);
motor1.backward();
motor2.setSpeed(200);
motor2.backward();
delay(1000);
motor1.stop();
motor2.stop();
delay(1000);
// 左转向:M1正转,M2反转
motor1.setSpeed(200);
motor1.forward();
motor2.setSpeed(200);
motor2.backward();
delay(1000);
motor1.stop();
motor2.stop();
delay(1000);
// 右转向:M1反转,M2正转
motor1.setSpeed(200);
motor1.backward();
motor2.setSpeed(200);
motor2.forward();
delay(1000);
motor1.stop();
motor2.stop();
delay(1000);
}实验记录视频
【花雕学编程】Arduino动手做(228)---2米PVC水管六个TT马达驱动火星车
实验场景图
Mind+图形编程
Linkboy仿真编程
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之四:不使用库,详细控制火星车的多种速度变化
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之二:不使用库,详细控制火星车的多种速度变化
*/
// 电机A
#define ENA_PIN 9 // PWM引脚
#define IN1_PIN 5 // 方向引脚1
#define IN2_PIN 4 // 方向引脚2
// 电机B
#define ENB_PIN 6 // PWM引脚
#define IN3_PIN 3 // 方向引脚1
#define IN4_PIN 2 // 方向引脚2
// 定义电机结构体
struct Motor {
byte speed = 0; // 电机速度
byte input1 = LOW; // 方向引脚1状态
byte input2 = LOW; // 方向引脚2状态
};
// 创建电机对象
Motor motorA, motorB;
void setup() {
Serial.begin(115200);
// 设置PWM和方向引脚为输出
pinMode(ENA_PIN, OUTPUT);
pinMode(IN1_PIN, OUTPUT);
pinMode(IN2_PIN, OUTPUT);
pinMode(ENB_PIN, OUTPUT);
pinMode(IN3_PIN, OUTPUT);
pinMode(IN4_PIN, OUTPUT);
// 初始化电机
sendToMotor(motorA, ENA_PIN, IN1_PIN, IN2_PIN);
sendToMotor(motorB, ENB_PIN, IN3_PIN, IN4_PIN);
}
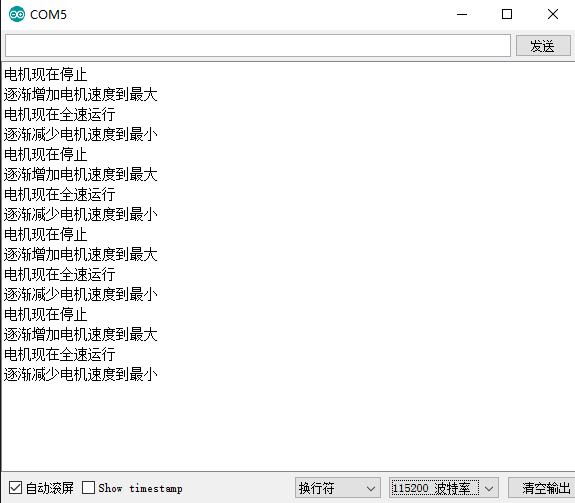
void loop() {
Serial.println("电机现在停止");
delay(2000);
// 设置电机方向为前进
setMotorDirection(motorA, HIGH, LOW);
setMotorDirection(motorB, HIGH, LOW);
Serial.println("逐渐增加电机速度到最大");
changeMotorSpeedGradually(0, 255);
Serial.println("电机现在全速运行");
delay(2000);
Serial.println("逐渐减少电机速度到最小");
changeMotorSpeedGradually(255, 0);
Serial.println("电机现在停止");
delay(2000);
// 设置电机方向为后退
setMotorDirection(motorA, LOW, HIGH);
setMotorDirection(motorB, LOW, HIGH);
Serial.println("逐渐增加电机速度到最大");
changeMotorSpeedGradually(0, 255);
Serial.println("电机现在全速运行");
delay(2000);
Serial.println("逐渐减少电机速度到最小");
changeMotorSpeedGradually(255, 0);
}
// 发送控制信号到电机
void sendToMotor(Motor &motor, byte enPin, byte in1Pin, byte in2Pin) {
analogWrite(enPin, motor.speed); // 设置PWM信号
digitalWrite(in1Pin, motor.input1); // 设置方向引脚1
digitalWrite(in2Pin, motor.input2); // 设置方向引脚2
}
// 设置电机方向
void setMotorDirection(Motor &motor, byte input1, byte input2) {
motor.input1 = input1;
motor.input2 = input2;
sendToMotor(motor, ENA_PIN, IN1_PIN, IN2_PIN);
sendToMotor(motor, ENB_PIN, IN3_PIN, IN4_PIN);
}
// 逐渐改变电机速度
void changeMotorSpeedGradually(int startSpeed, int endSpeed) {
int step = (startSpeed < endSpeed) ? 1 : -1;
for (int speed = startSpeed; speed != endSpeed; speed += step) {
motorA.speed = speed;
motorB.speed = speed;
sendToMotor(motorA, ENA_PIN, IN1_PIN, IN2_PIN);
sendToMotor(motorB, ENB_PIN, IN3_PIN, IN4_PIN);
delay(20); // 添加小延迟以平滑速度变化
}
}实验串口返回情况
要点解读
1、结构简化:将电机的方向和速度控制封装到函数中,减少重复代码,提高可读性。
2、灵活性增强:通过传递电机对象和引脚参数,使代码更具通用性和灵活性。
3、逻辑清晰:将电机方向和速度控制逻辑分离,使代码更易于理解和维护。
4、平滑速度变化:通过逐步增加或减少速度,实现电机速度的平滑变化,减少机械冲击。
5、延迟控制:使用delay()函数控制速度变化的步进时间,确保每个动作有足够的时间完成。
实验场景图
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之五:启动火星车,控制方向逐渐减少增加电机速度
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之五:启动火星车,控制方向逐渐减少增加电机速度
*/
// 电机A连接
int enA = 9; // PWM引脚
int in1 = 5; // 方向引脚1
int in2 = 4; // 方向引脚2
// 电机B连接
int enB = 6; // PWM引脚
int in3 = 3; // 方向引脚1
int in4 = 2; // 方向引脚2
void setup() {
// 设置引脚模式为输出
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
// 初始化电机状态为低电平
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop() {
directionControl(); // 控制电机方向
delay(1000);
speedControl(); // 控制电机速度
delay(1000);
}
void directionControl() {
// 设置电机为最大速度
// PWM值范围从0到255
analogWrite(enA, 255);
analogWrite(enB, 255);
// 启动电机A和电机B
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
delay(2000);
// 改变电机方向
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(2000);
// 关闭电机
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void speedControl() {
// 启动电机
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// 逐渐增加电机速度
for (int i = 0; i < 256; i++) {
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// 逐渐减少电机速度
for (int i = 255; i >= 0; --i) {
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// 关闭电机
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}代码要点解读
1、引脚定义:定义了电机A和电机B的PWM和方向控制引脚。
2、引脚初始化:在setup()函数中,将所有引脚设置为输出模式,并初始化为低电平。
3、方向控制:在directionControl()函数中,通过设置方向引脚的高低电平来控制电机的旋转方向,并通过PWM信号控制速度。
4、速度控制:在speedControl()函数中,通过逐步增加和减少PWM信号,实现电机速度的平滑变化。
5、延迟控制:使用delay()函数控制电机动作的持续时间,确保每个动作有足够的时间完成。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
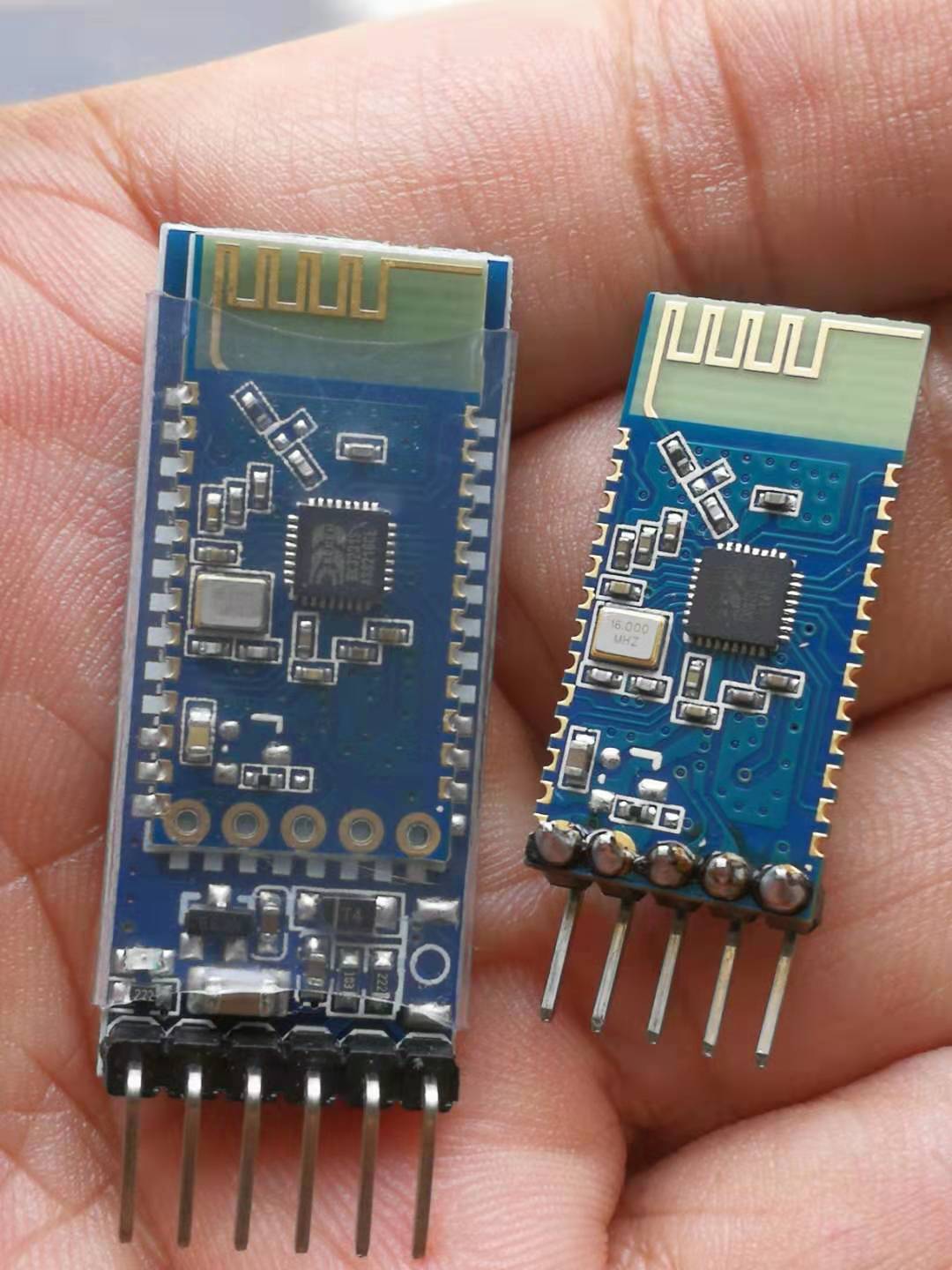
项目实验之六:JDY-31蓝牙模块从模式与Arduino的回环测试




【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之六:JDY-31蓝牙模块从模式与Arduino的回环测试
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之六:JDY-31蓝牙模块从模式与Arduino的回环测试
JDY-31模块与Uno接线:
VCC VCC
GND GND
TXD D0
RXD D1
*/
void setup() {
Serial.begin(9600); // 初始化串口通信,波特率设置为9600
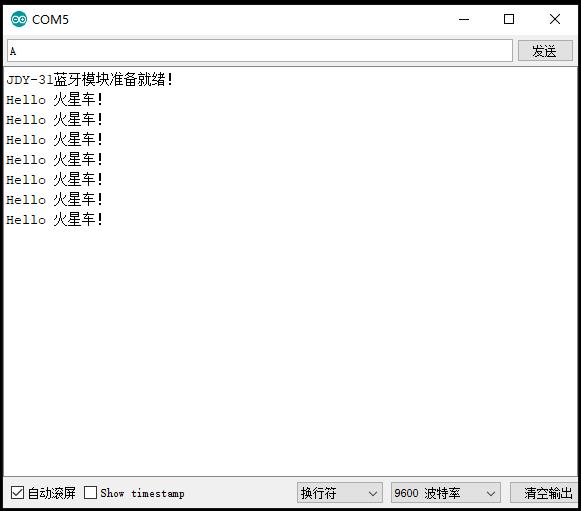
Serial.println("JDY-31蓝牙模块准备就绪!"); // 向串口输出初始化完成信息
}
void loop() {
while (Serial.available()) // 检查串口是否有可读取的数据
{
char c = Serial.read(); // 读取串口数据
if (c == 'A') // 如果读取到的数据是字符'A'
{
Serial.println("Hello 火星车!"); // 向串口输出“Hello 火星车!”
}
}
delay(100); // 延迟100毫秒
}实验串口返回情况
实验场景图
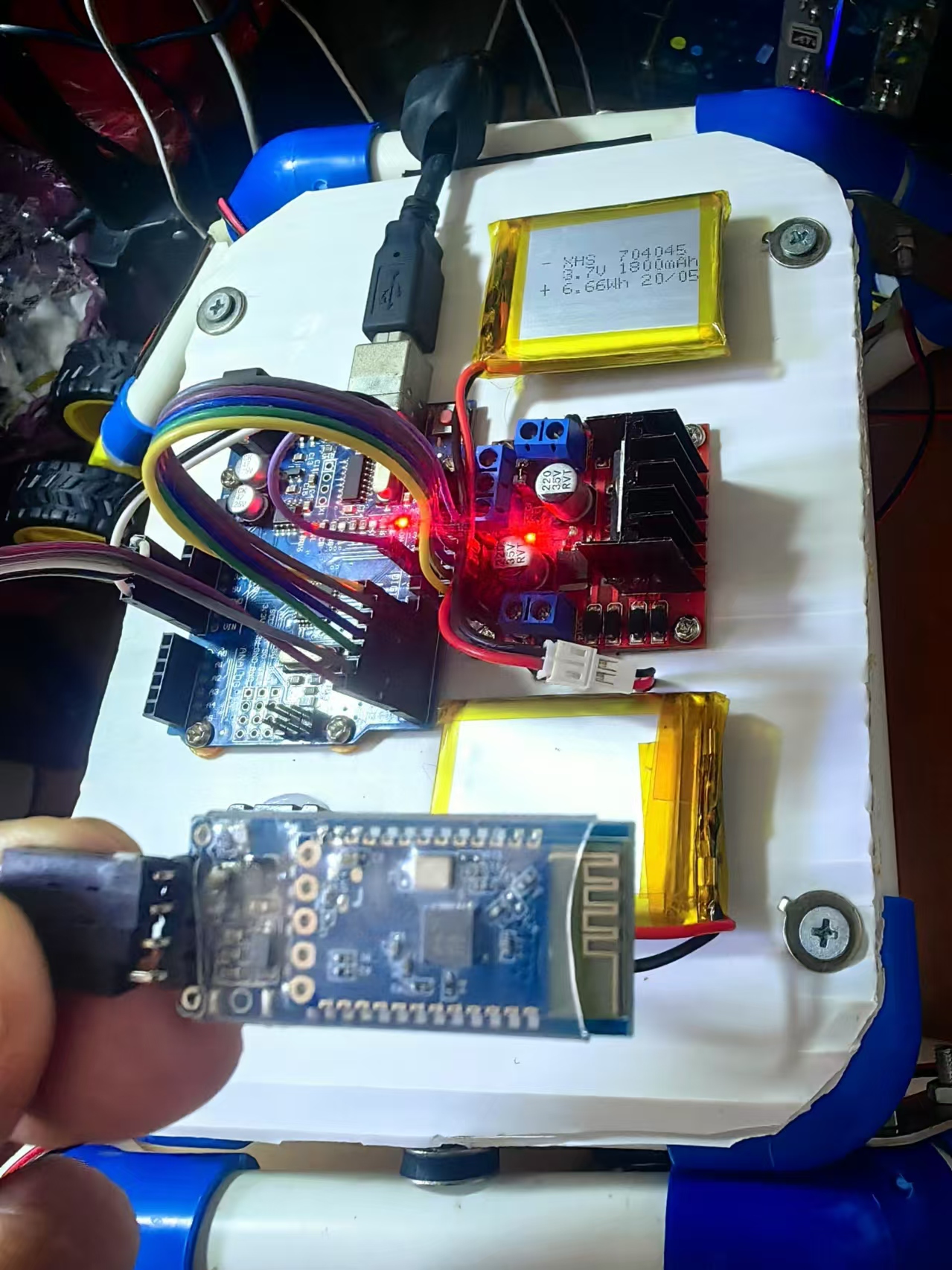
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之七:通过JDY-31蓝牙模块Arduino 控制板载LED灯
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之七:通过JDY-31蓝牙模块Arduino 控制板载LED灯
JDY-31模块与Uno接线:
VCC VCC
GND GND
TXD D0
RXD D1
*/
const byte LED = 13; // 定义LED引脚为13
char val; // 定义一个字符变量val
void setup() {
pinMode(LED, OUTPUT); // 设置LED引脚为输出模式
Serial.begin(57600); // 初始化串口通信,波特率设置为57600
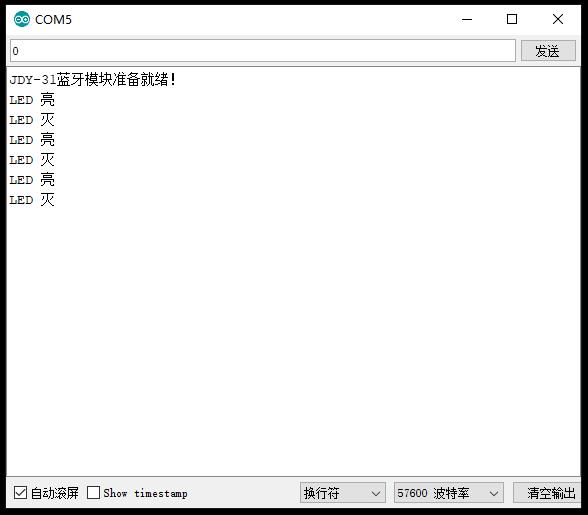
Serial.println("JDY-31蓝牙模块准备就绪!"); // 向串口输出初始化完成信息
}
void loop() {
if ( Serial.available() ) { // 检查串口是否有可读取的数据
val = Serial.read(); // 读取串口数据并存储在val中
switch (val) { // 根据读取到的数据执行不同的操作
case '0' : // 如果读取到的数据是字符'0'
digitalWrite(LED, LOW); // 将LED设置为低电平(关闭)
Serial.println("LED 灭"); // 向串口输出“LED 灭”
break;
case '1' : // 如果读取到的数据是字符'1'
digitalWrite(LED, HIGH); // 将LED设置为高电平(打开)
Serial.println("LED 亮"); // 向串口输出“LED 亮”
break;
}
}
}实验串口返回情况
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之八:通过JDY-31蓝牙模块串口字符来控制火星车
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之八:通过JDY-31蓝牙模块串口字符来控制火星车
JDY-31模块与Uno接线:
VCC VCC
GND GND
TXD D0
RXD D1
*/
#include <L298N.h>
// 创建电机对象
L298N motor1(9, 5, 4); // 第一个电机(并接右侧三个TT马达)
L298N motor2(6, 3, 2); // 第二个电机(并接左侧三个TT马达)
char command; // 用于存储从蓝牙模块接收到的命令
void setup() {
pinMode(LED_BUILTIN, OUTPUT); // 设置板载LED为输出模式
Serial.begin(57600); // 初始化串口通信,波特率设置为57600
Serial.println("JDY-31蓝牙模块准备就绪!"); // 向串口输出初始化完成信息
}
void loop() {
if (Serial.available()) { // 检查串口是否有可读取的数据
command = Serial.read(); // 读取串口数据并存储在command中
switch (command) { // 根据接收到的命令执行不同的操作
case 'F': // 前进
motor1.setSpeed(200); // 设置电机1的速度为200
motor1.forward(); // 电机1正转
motor2.setSpeed(200); // 设置电机2的速度为200
motor2.forward(); // 电机2正转
Serial.println("前进"); // 向串口输出“前进”
break;
case 'B': // 后退
motor1.setSpeed(200); // 设置电机1的速度为200
motor1.backward(); // 电机1反转
motor2.setSpeed(200); // 设置电机2的速度为200
motor2.backward(); // 电机2反转
Serial.println("后退"); // 向串口输出“后退”
break;
case 'L': // 左转
motor1.setSpeed(200); // 设置电机1的速度为200
motor1.backward(); // 电机1反转
motor2.setSpeed(200); // 设置电机2的速度为200
motor2.forward(); // 电机2正转
Serial.println("左转"); // 向串口输出“左转”
break;
case 'R': // 右转
motor1.setSpeed(200); // 设置电机1的速度为200
motor1.forward(); // 电机1正转
motor2.setSpeed(200); // 设置电机2的速度为200
motor2.backward(); // 电机2反转
Serial.println("右转"); // 向串口输出“右转”
break;
case 'S': // 停止
motor1.stop(); // 停止电机1
motor2.stop(); // 停止电机2
Serial.println("停止"); // 向串口输出“停止”
break;
default:
Serial.println("无效命令"); // 向串口输出“无效命令”
break;
}
}
}实验串口返回情况
实验场景图
在头条上搜:蓝牙串口APP,并安装


【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
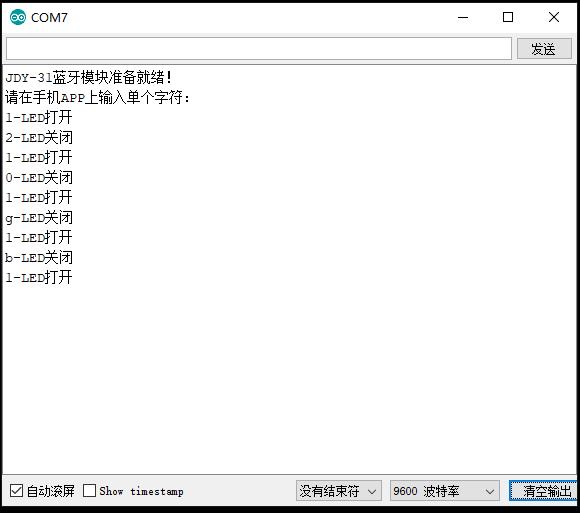
项目实验之九:最简单的蓝牙控制板载LED的程序,输入1为亮,其他为熄灭,
串口显示输入字符(手机端-应用宝-搜索《SPP》-安装-打开-搜蓝牙
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之九:最简单的蓝牙控制板载LED的程序,输入1为亮,其他为熄灭,
串口显示输入字符(手机端-应用宝-搜索《SPP》-安装-打开-搜蓝牙
<JDY-31-SPP>-连接-设置控制面板)
连接方式 LED D13
JDY-31模块与Uno接线:
VCC VCC
GND GND
TXD D3
RXD D2
*/
#include <SoftwareSerial.h>
const byte LED_PIN = 13; // 定义LED引脚为常量
/* 创建一个名为bt的SoftwareSerial类对象 */
SoftwareSerial bt(2, 3); /* (Rx, Tx) 引脚定义 */
void setup() {
pinMode(LED_PIN, OUTPUT); // 设置LED引脚为输出模式
bt.begin(9600); // 定义软件串口通信的波特率为9600
Serial.begin(9600); // 定义硬件串口通信的波特率为9600
Serial.println("JDY-31蓝牙模块准备就绪!"); // 向串口输出初始化完成信息
Serial.println("请在手机APP上输入单个字符:");
}
void loop() {
if (bt.available()) { // 检查软件串口是否有可读取的数据
char inputChar = bt.read(); // 读取软件串口数据并存储在inputChar中
Serial.print(inputChar); // 向串口输出读取到的字符
if (inputChar == '1') { // 如果输入字符为'1'
digitalWrite(LED_PIN, HIGH); // 点亮LED
Serial.println("-LED打开"); // 向串口输出“LED打开”
} else { // 其他字符
digitalWrite(LED_PIN, LOW); // 熄灭LED
Serial.println("-LED关闭"); // 向串口输出“LED关闭”
}
}
}打开手机蓝牙串口APP,搜索蓝牙设备,找到“JDY-31-SPP”,进行配对,然后连接
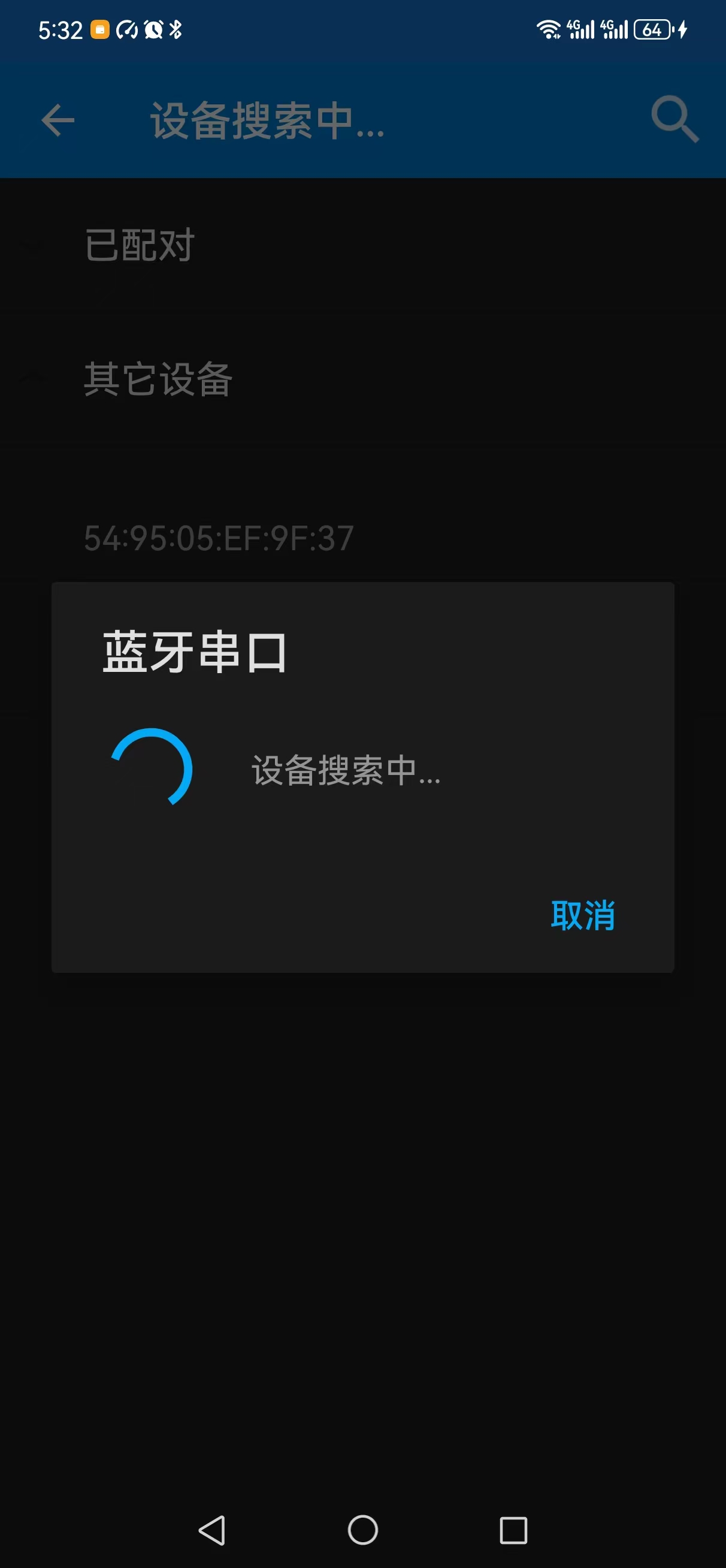
打开Arduino IDE的串口,设置波特率为9600,打开手机蓝牙串口APP,连接后,输入1时LED为亮,其他为熄灭。
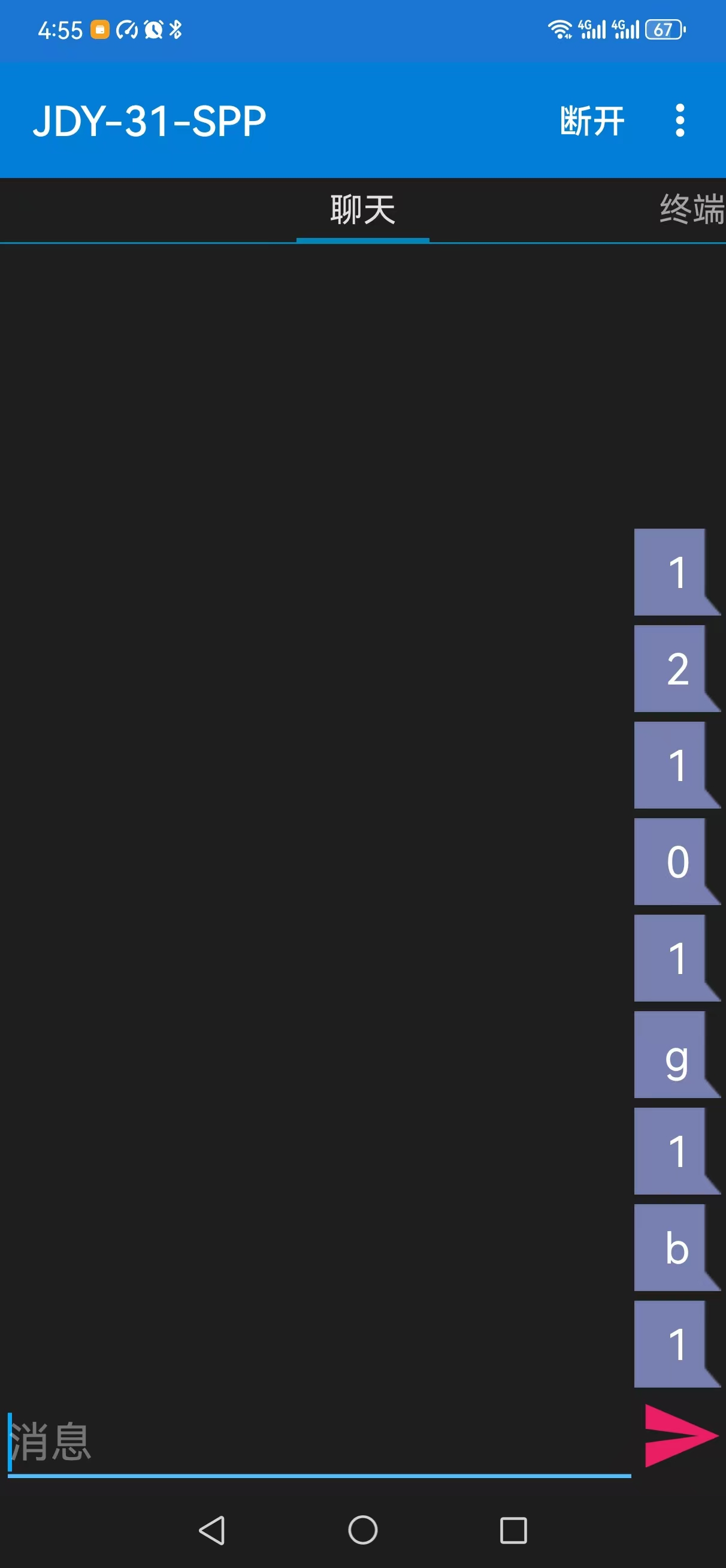
实验串口返回情况
代码要点
1、LED引脚定义:使用常量LED_PIN定义LED引脚,便于修改和维护。
2、串口初始化:在setup()函数中初始化软件串口和硬件串口,波特率均设置为9600。
3、数据读取:在loop()函数中检查软件串口是否有数据可读取,并读取输入字符。
4、字符显示:将读取到的字符通过硬件串口输出,便于调试和监控。
5、LED控制:根据输入字符控制LED的状态,输入1时点亮LED并输出“LED打开”,其他字符时熄灭LED并输出“LED关闭”。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之十:设置蓝牙控制面板,在键盘上设开灯与关灯二个按键
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之十:设置蓝牙控制面板,在键盘上设开灯与关灯二个按键
连接方式 LED D13
JDY-31模块与Uno接线:
VCC VCC
GND GND
TXD D3
RXD D2
*/
#include <SoftwareSerial.h>
const byte LED_PIN = 13; // 定义LED引脚为常量
/* 创建一个名为bt的SoftwareSerial类对象 */
SoftwareSerial bt(2, 3); /* (Rx, Tx) 引脚定义 */
void setup() {
pinMode(LED_PIN, OUTPUT); // 设置LED引脚为输出模式
bt.begin(9600); // 定义软件串口通信的波特率为9600
Serial.begin(9600); // 定义硬件串口通信的波特率为9600
Serial.println("JDY-31蓝牙模块准备就绪!"); // 向串口输出初始化完成信息
Serial.println("请在手机APP上输入单个字符:");
}
void loop() {
if (bt.available()) { // 检查软件串口是否有可读取的数据
char inputChar = bt.read(); // 读取软件串口数据并存储在inputChar中
Serial.print(inputChar); // 向串口输出读取到的字符
if (inputChar == '1') { // 如果输入字符为'1'
digitalWrite(LED_PIN, HIGH); // 点亮LED
Serial.println("-LED打开"); // 向串口输出“LED打开”
} else if (inputChar == '0') { // 如果输入字符为'0'
digitalWrite(LED_PIN, LOW); // 熄灭LED
Serial.println("-LED关闭"); // 向串口输出“LED关闭”
} else {
Serial.println("-无效命令"); // 向串口输出“无效命令”
}
}
}实验串口返回情况
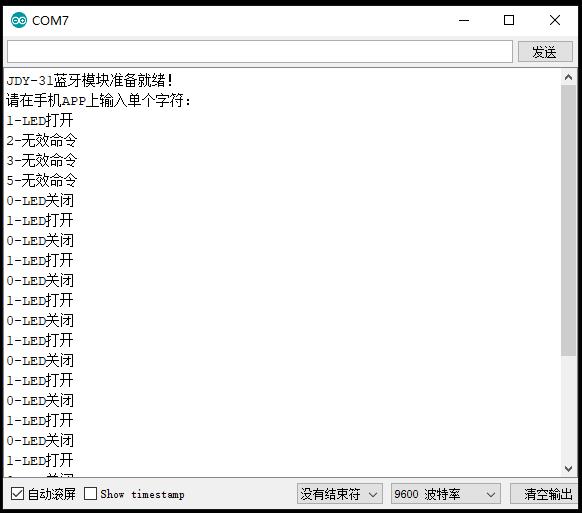
蓝牙控制面板,在键盘上设开灯与关灯二个按键

【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
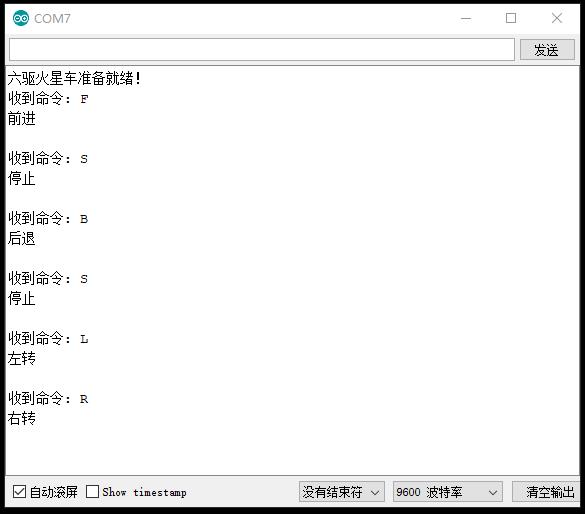
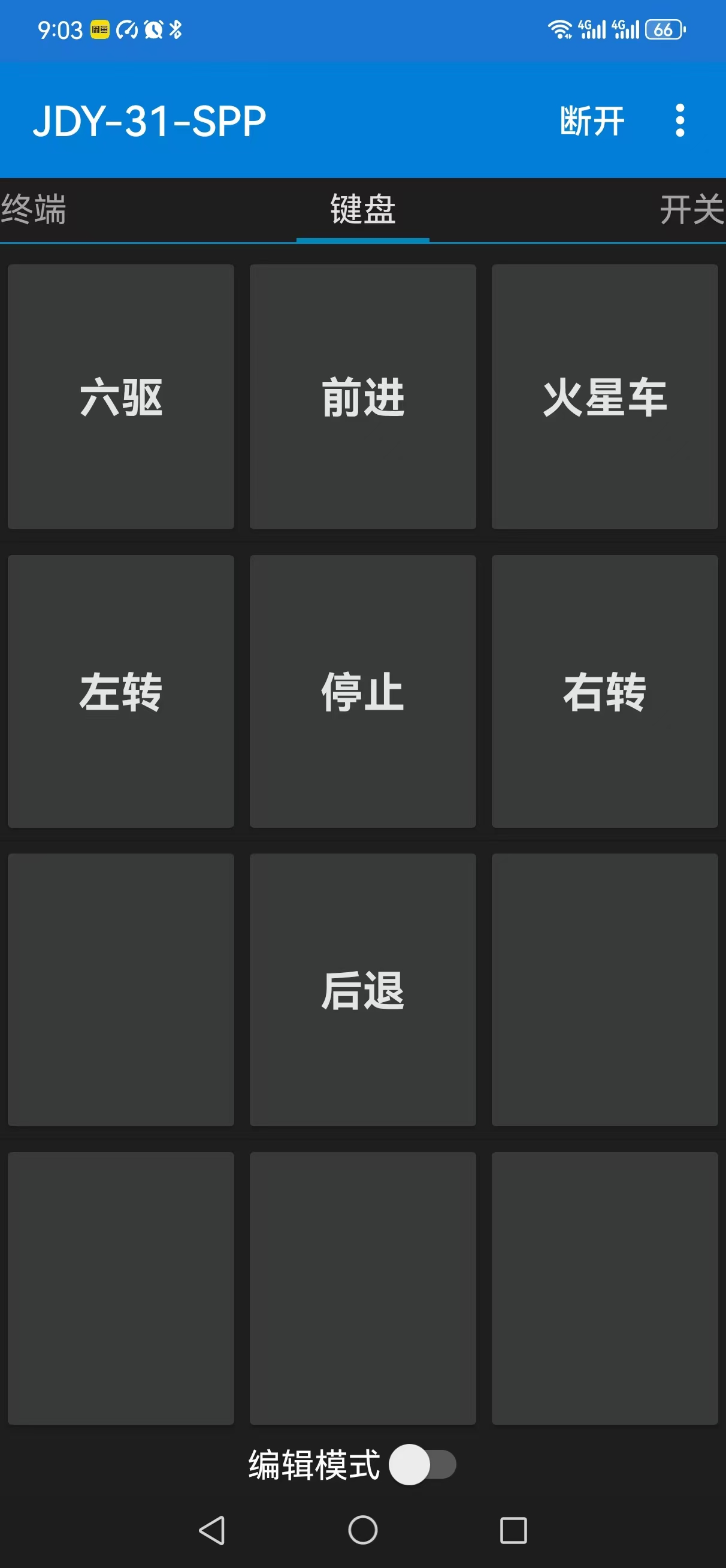
项目实验之十一:设置火星车简易蓝牙控制面板,前后左右停止
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十八:2米PVC水管六个TT马达驱动火星车
项目实验之十一:设置火星车简易蓝牙控制面板,前后左右停止
JDY-31模块与Uno接线:
VCC VCC
GND GND
TXD D8
RXD D7
*/
#include <L298N.h> // 包含L298N电机驱动库
#include <SoftwareSerial.h> // 包含软件串口库
// 创建电机对象
L298N motor1(9, 5, 4); // 第一个电机对象,连接到引脚9, 5, 4(并接右侧三个TT马达)
L298N motor2(6, 3, 2); // 第二个电机对象,连接到引脚6, 3, 2(并接左侧三个TT马达)
// 创建蓝牙串口对象
SoftwareSerial bt(7, 8); // 定义软件串口对象,使用引脚7 (Rx) 和 8 (Tx)
void setup() {
// 初始化电机
motor1.setSpeed(0); // 设置电机1的初始速度为0
motor2.setSpeed(0); // 设置电机2的初始速度为0
// 初始化蓝牙串口
bt.begin(9600); // 设置蓝牙串口通信的波特率为9600
Serial.begin(9600); // 设置硬件串口通信的波特率为9600
Serial.println("六驱火星车准备就绪!"); // 向串口输出初始化完成信息
}
void loop() {
if (bt.available()) { // 检查蓝牙串口是否有可读取的数据
char command = bt.read(); // 读取蓝牙串口数据并存储在command变量中
Serial.println(command); // 向串口输出读取到的字符
switch (command) { // 根据读取到的命令执行相应操作
case 'F': // 前进命令
motor1.setSpeed(200); // 设置电机1速度为200
motor1.forward(); // 电机1前进
motor2.setSpeed(200); // 设置电机2速度为200
motor2.forward(); // 电机2前进
Serial.println("前进"); // 向串口输出“前进”信息
break;
case 'B': // 后退命令
motor1.setSpeed(200); // 设置电机1速度为200
motor1.backward(); // 电机1后退
motor2.setSpeed(200); // 设置电机2速度为200
motor2.backward(); // 电机2后退
Serial.println("后退"); // 向串口输出“后退”信息
break;
case 'L': // 左转命令
motor1.setSpeed(200); // 设置电机1速度为200
motor1.backward(); // 电机1后退
motor2.setSpeed(200); // 设置电机2速度为200
motor2.forward(); // 电机2前进
Serial.println("左转"); // 向串口输出“左转”信息
break;
case 'R': // 右转命令
motor1.setSpeed(200); // 设置电机1速度为200
motor1.forward(); // 电机1前进
motor2.setSpeed(200); // 设置电机2速度为200
motor2.backward(); // 电机2后退
Serial.println("右转"); // 向串口输出“右转”信息
break;
case 'S': // 停止命令
motor1.stop(); // 停止电机1
motor2.stop(); // 停止电机2
Serial.println("停止"); // 向串口输出“停止”信息
break;
default: // 无效命令
Serial.println("无效命令"); // 向串口输出“无效命令”信息
break;
}
}
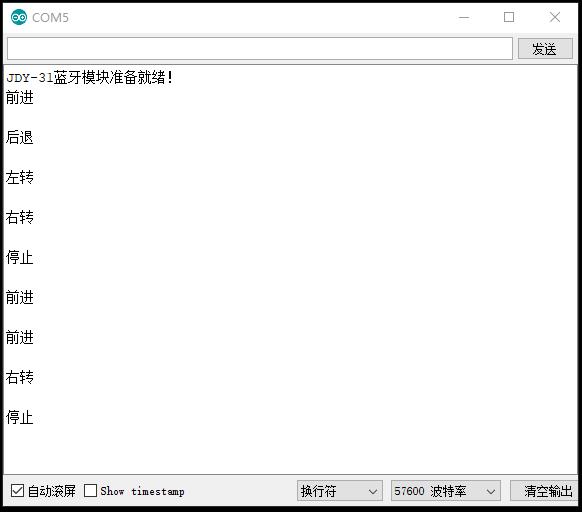
}实验串口返回情况
手机端蓝牙聊天模式
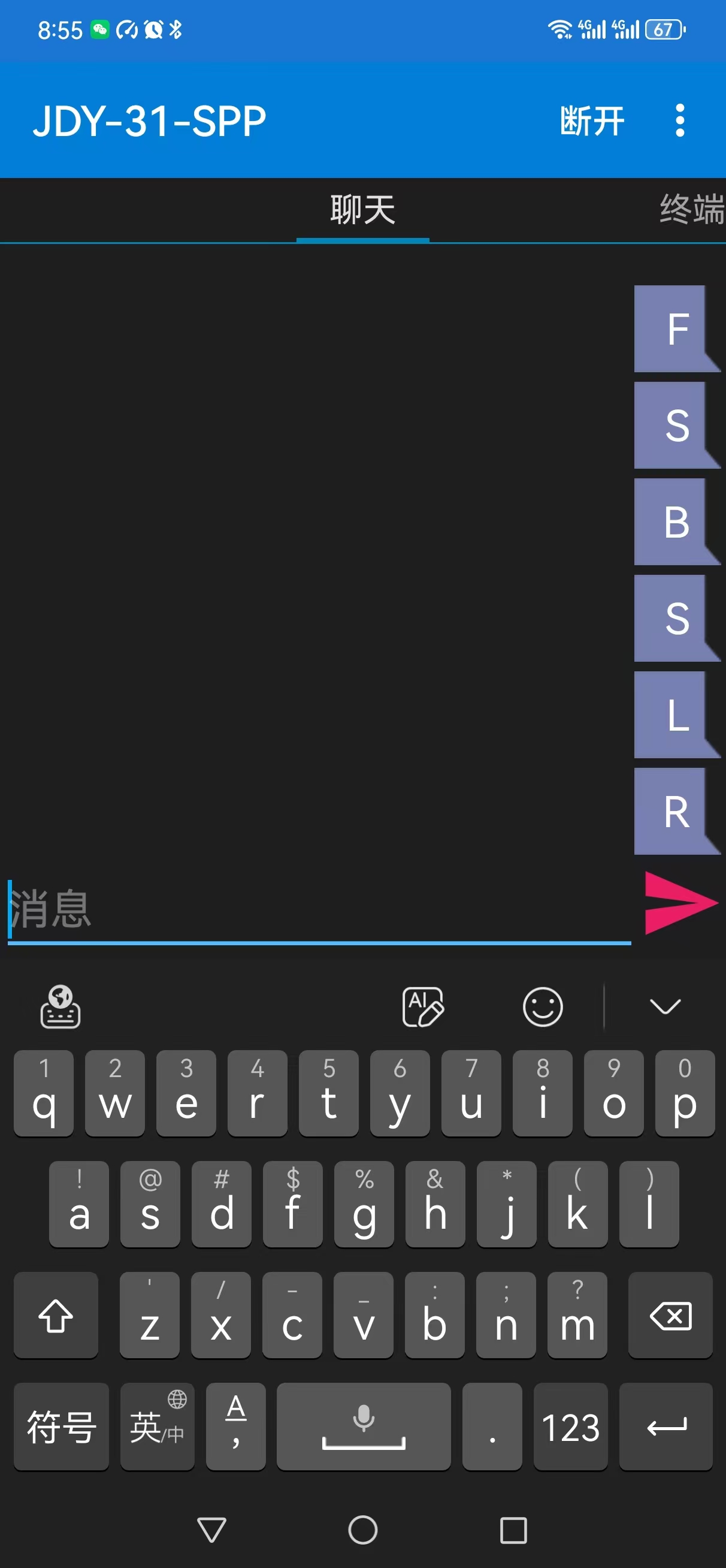
手机端蓝牙按键模式
【花雕学编程】Arduino动手做(228)---2米PVC水管六个TT马达驱动火星车
实验记录视频
【[花雕动手做] 蓝牙控制的六驱动小车#科技改变生活】
实验场景图


 他的勋章
他的勋章

评论