 返回首页
返回首页
 回到顶部
回到顶部
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来——小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机

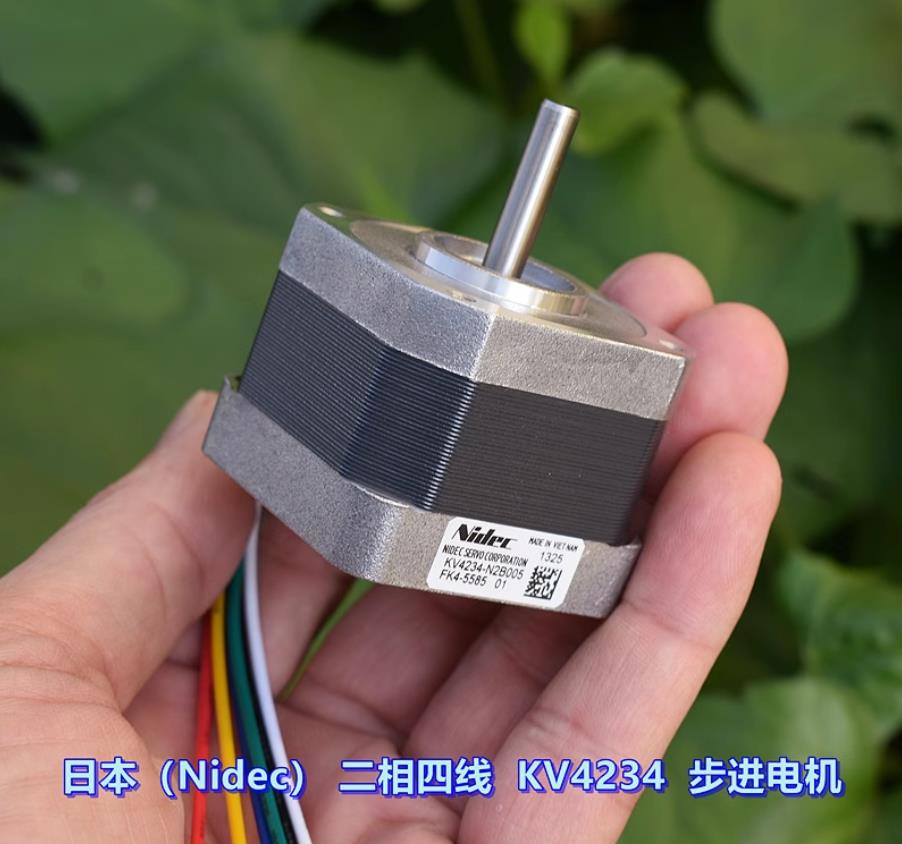
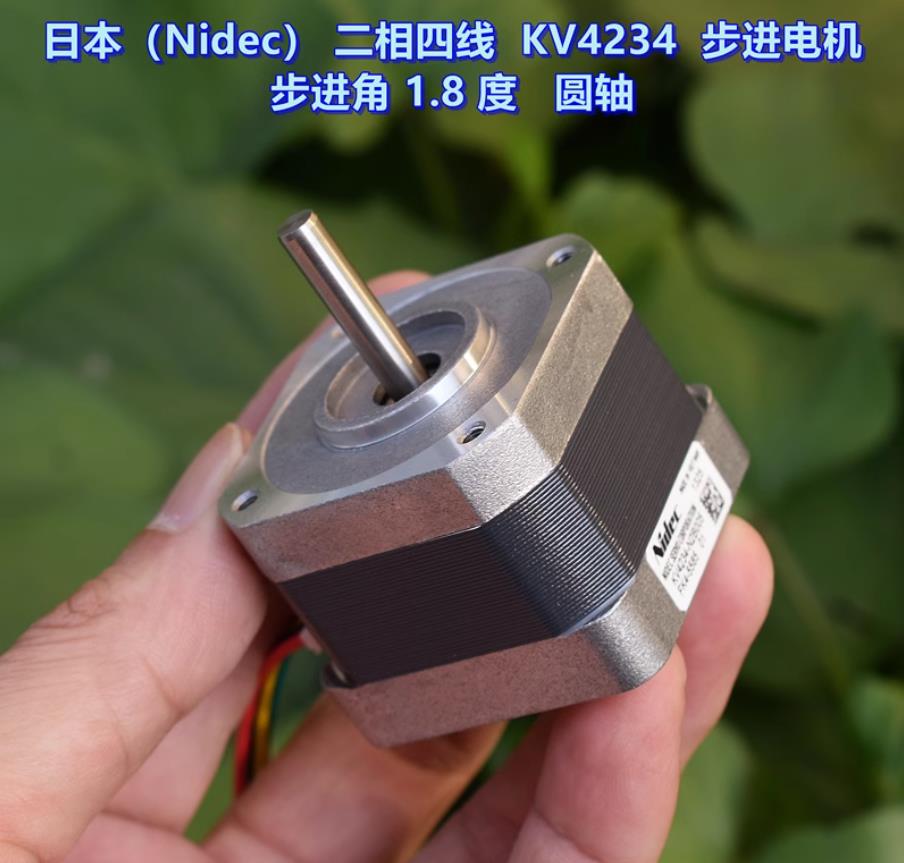


电机规格 :42 步进电机
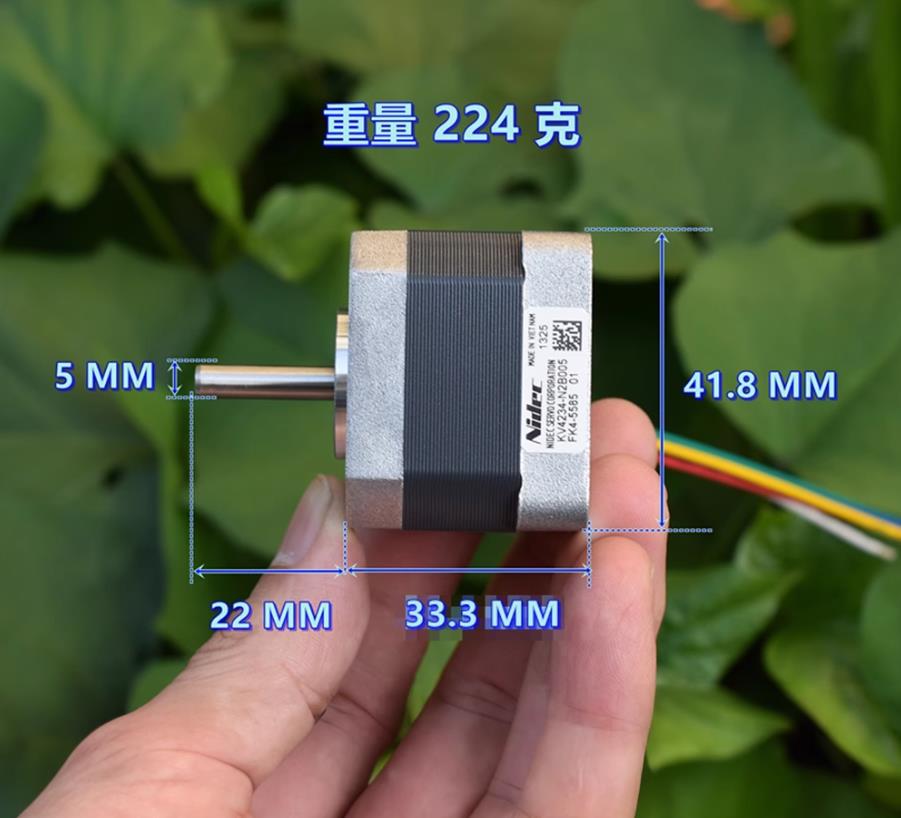
电机厚度 :33.3 MM
电机轴径 :5 MM圆轴(没有扁位)
输出轴长度 :22 MM
线长 :大约 140 MM(线是送的)
电机重量 :224 克
电机内阻 :1.5 欧
5V 短路电流 :2.7 A
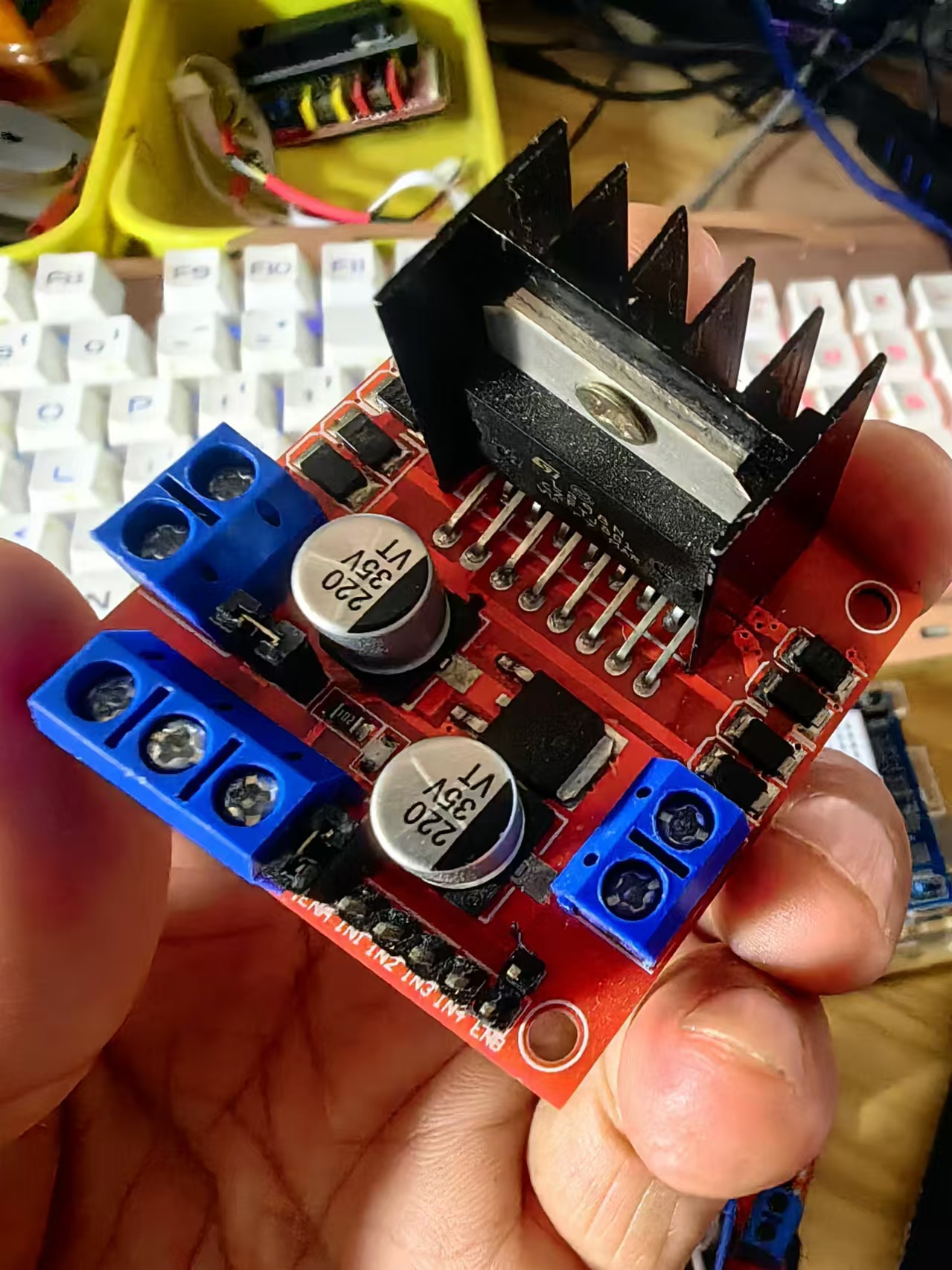
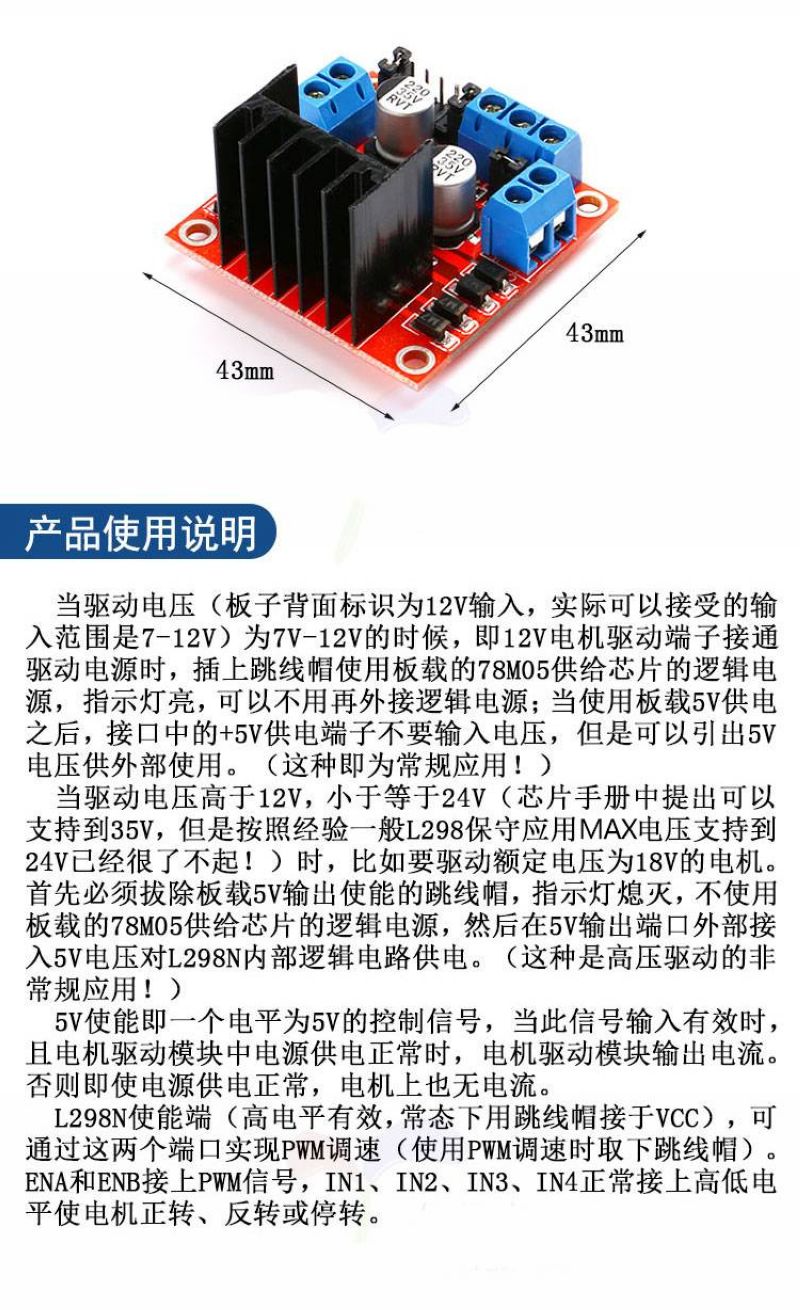
L298N
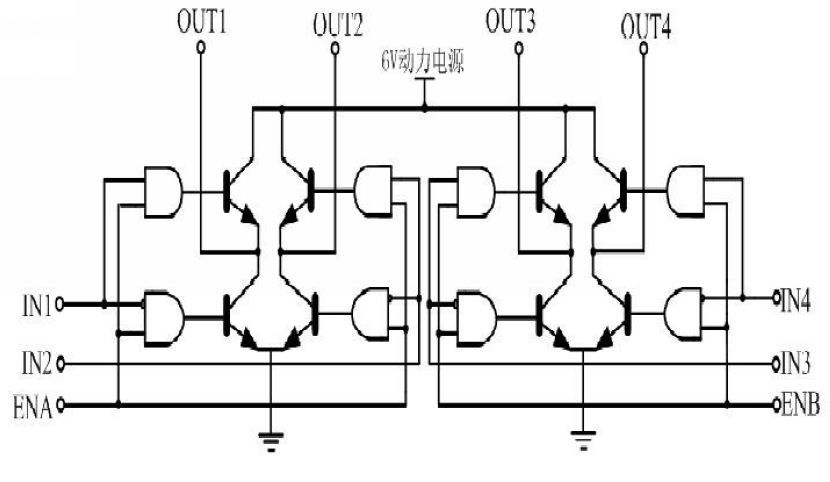
是专用驱动集成电路,属于H桥集成电路,与L293D的差别是其输出电流增大,功率增强。其输出电流为2A,最高电流4A,最高工作电压50V,可以驱动感性负载,如大功率直流电机,步进电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。当驱动直流电机时,可以直接控制步进电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。
L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。
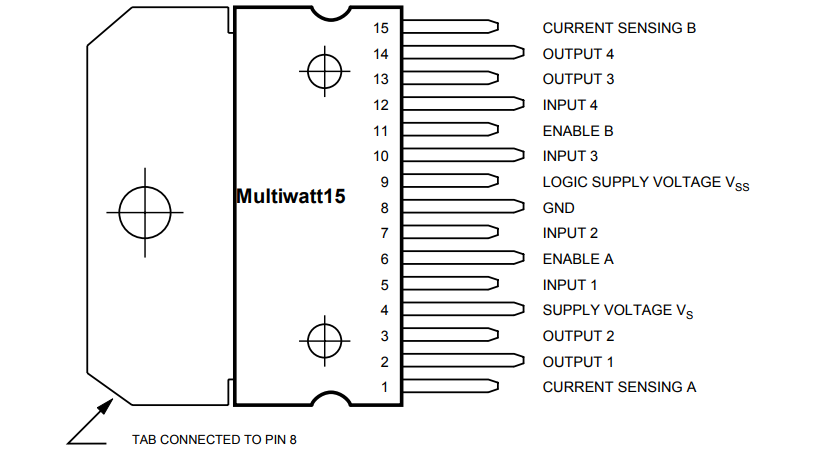
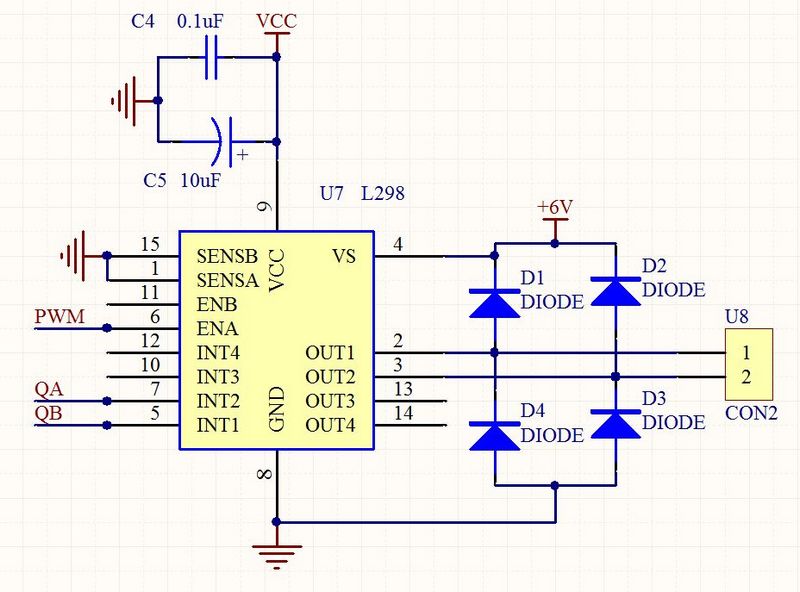
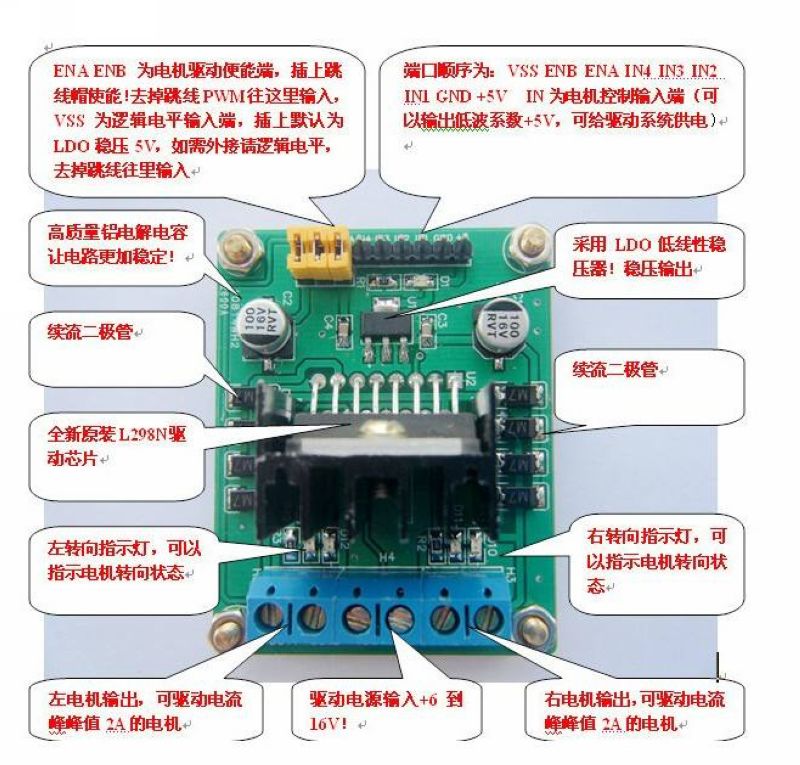
L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7V电压。4脚VS接电源电压,VS电压范围VIH为+2.5~46V。输出电流可达2A,可驱动电感性负载。1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。5,7,10,12脚接输入控制电平,控制电机的正反转。EnA,EnB接控制使能端,控制电机的停转。

L298N特性参数
类型: 半桥
输入类型:非反相
输出数:4
电流-输出/通道:2A
电流-峰值输出:3A
电源电压:4.5V~46V
工作温度:-25°C~130°C
安装类型:通孔
封装/外壳:MulTIwatt-15(垂直,弯曲和错列引线)
供应商设备封装:15-MulTIwatt
包装:管件
器件型号L298N
制造商STMicroelectronics
产品型号MotionMotorControl

L298N电机驱动板模块的参数
1.驱动芯片:L298N双H桥直流电机驱动芯片
2.驱动部分端子供电范围Vs:+5V~+35V ; 如需要板内取电,则供电范围Vs:+7V~+35V
3.驱动部分峰值电流Io:2A
4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)
5.逻辑部分工作电流范围:0~36mA
6.控制信号输入电压范围:
低电平:-0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss
7.使能信号输入电压范围:
低电平:-0.3≤Vin≤1.5V(控制信号无效)
高电平:2.3V≤Vin≤Vss(控制信号有效)
8.最大功耗:20W(温度T=75℃时)

L298N电机驱动模块性能特点:
1:可实现电机正反转及调速。
2:启动性能好,启动转矩大。
3:工作电压可达到36V,4A。
4:可同时驱动两台直流电机。
5:适合应用于机器人设计及智能小车的设计。
情况一:用L298N驱动两台直流减速电机的电路。引脚A,B可用于PWM控制。如果机器人项目只要求直行前进,则可将IN1,IN2和IN3,IN4两对引脚分别接高电平和低电平,仅用单片机的两个端口给出PWM信号控制使能端A,B即可实现直行、转弯、加减速等动作。
情况二:用L298实现二相步进电机控制。将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。信号频率决定了电机的转速。改变绕组脉冲信号的顺序即可实现正反转。
注意事项:
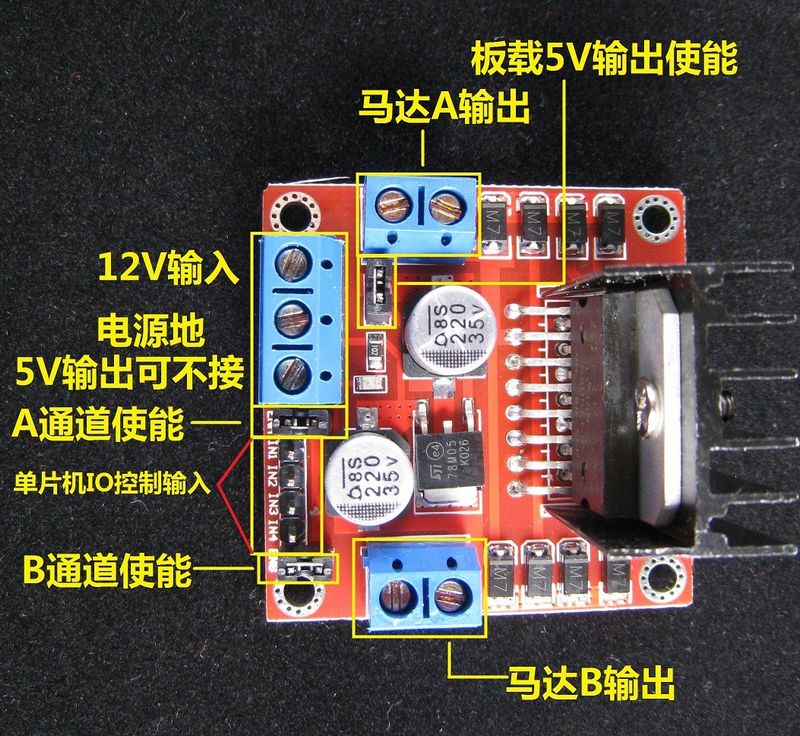
1.当你的驱动电压(上图标识为12V输入,实际可以接受的输入范围是7-12V)为7V-12V的时候,可以使能板载的5V逻辑供电,当使用板载5V供电之后,接口中的+5V供电不要输入电压,但是可以引出5V电压供外部使用。(这种即为常规应用!)
2.当驱动电压高于12V,小于等于24V(芯片手册中提出可以支持到35V,但是按照经验一般298保守应用最大电压支持到24V已经很了不起!)时,比如要驱动额定电压为18V的电机。首先必须拔除板载5V输出使能的跳线帽。然后在5V输出端口外部接入5V,5V使能即 一个电平为5V的控制信号,当此信号输入有效时,且电机驱动模块中电源供电正常时,电机驱动模块输出电流。否则即使电源供电正常,电机上也无电流。电压对L298N内部逻辑电路供电。(这种是高压驱动的非常规应用!)
3、L298N供电的5V如果是用另外电源供电的话,(即不是和单片机的电源共用),那么需要将单片机的GND和模块上的GND连接在一起,只有这样单片机上过来的逻辑信号才有个参考0点。此点非常重要,请注意。
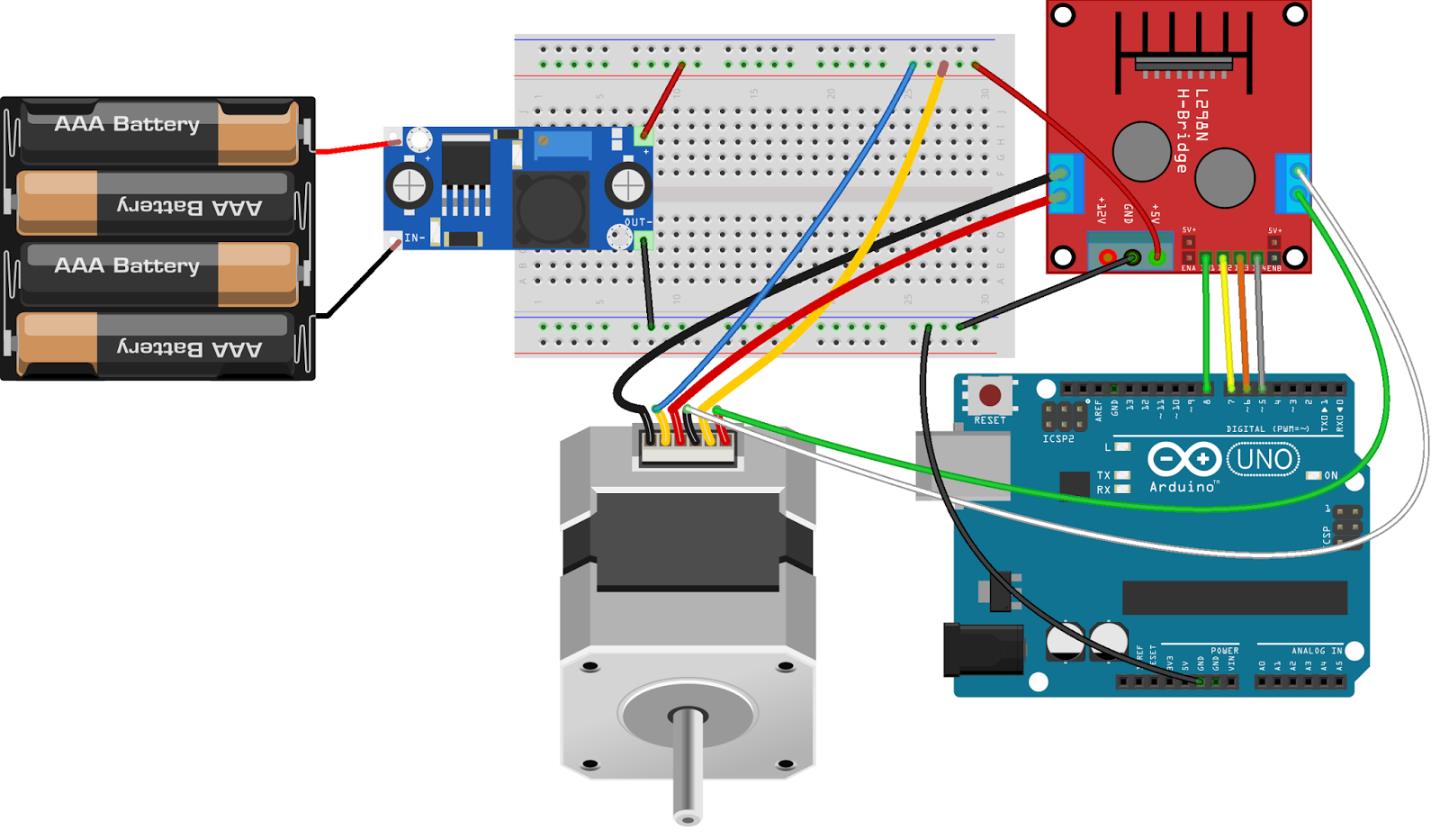
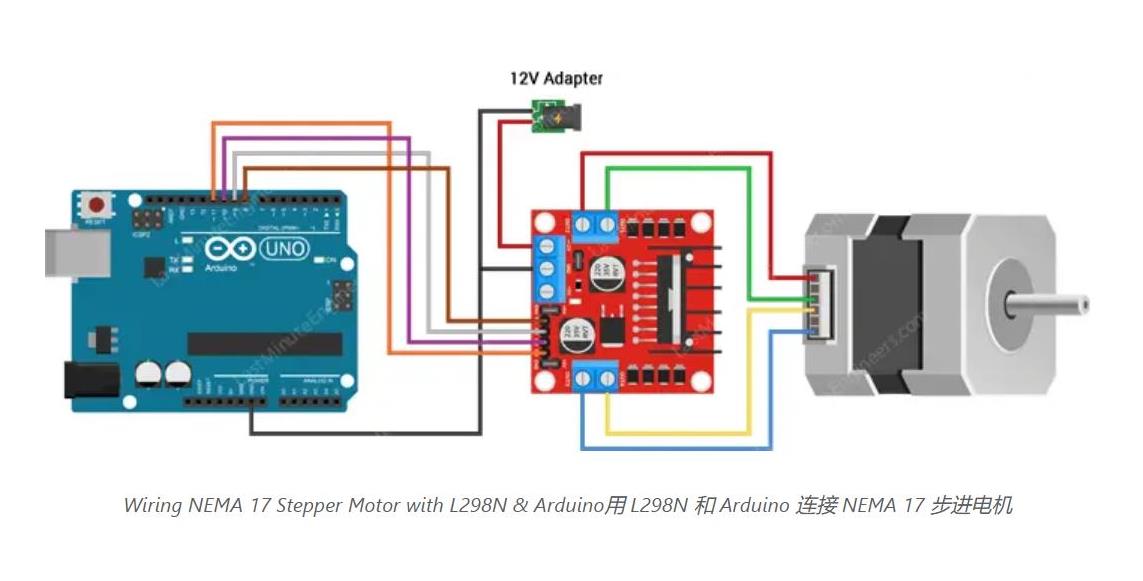
L298N电机驱动模块与42步进电机实验接线示意图

【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之一:使用 L298N Arduino 的 NEMA 17 步进电机简单控制
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之一:使用 L298N Arduino 的 NEMA 17 步进电机简单控制
*/
#include <Stepper.h>
const int stepsPerRevolution = 400;
//更改此设置以适应每次旋转的步数
//为您的电动机
//在引脚8至11上初始化步进电机库
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
//电机所走的步数
int stepCount = 0;
int dirStep = 1;
void setup() {
//初始化串行端口:
Serial.begin(9600);
}
void loop() {
//第一步
myStepper.step(dirStep);
Serial.print("步骤:");
Serial.println(stepCount);
stepCount++;
if ( stepCount > 800) {
stepCount = 0;
if ( dirStep == 1) dirStep = -1;
else dirStep = 1;
}
delayMicroseconds(50);
}实验串口返回情况
实验场景图

【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之二:使用 L298N控制步进电机正转三圈反转一圈
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之二:使用 L298N控制步进电机正转三圈反转一圈
*/
#include <Stepper.h>
//创建stepper类的实例。
//首先指定电机的步数,
//然后指定连接步进器的引脚号
Stepper myStepper1(200, 8, 9, 10, 11);
void setup() {
}
void loop() {
//设置电机速度
myStepper1.setSpeed(150);
//将电机转动特定数量的步数
myStepper1.step(600);
delay(1000);
//将电机转动特定步数
myStepper1.step(-200);
//反向方向
delay(1000);
myStepper1.step(200);
//正向方向
delay(1000);
myStepper1.step(-200);
//反向方向
delay(1000);
} 【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之三:使用10K电位器控制步进电机转速

实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之三:使用10K电位器控制步进电机转速
*/
//包含Arduino步进器库
#include <Stepper.h>
//定义常量
//每次输出旋转的步数
const int STEPS_PER_REV = 200;
//电位器接入A0
const int SPEED_CONTROL = A0;
//使用的引脚是8、9、10、11
//接L298N电机驱动器In1、In2、In3、In4
//按顺序8-9-10-11输入引脚,以进行正确的步骤排序
Stepper stepper_NEMA17(STEPS_PER_REV, 8, 9, 10, 11);
void setup() {
//在虚空设置中什么也不用做
}
void loop() {
//读取传感器值:
int sensorReading = analogRead(SPEED_CONTROL);
//将其映射到0到100的范围
int motorSpeed = map(sensorReading, 0, 1023, 0, 100);
//设置电机速度
if (motorSpeed > 0) {
stepper_NEMA17.setSpeed(motorSpeed);
//旋转的第1/100步
stepper_NEMA17.step(STEPS_PER_REV / 100);
}
}实验场景图

【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之四:不使用库,直接改变电压值控制步进电机持续正转
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之四:不使用库,直接改变电压值控制步进电机持续正转
*/
// 定义L298N模块的pin输出
int Pin_A = 8;
int Pin_AA = 9;
int Pin_B = 10;
int Pin_BB = 11;
int delayTime = 5; // 设定旋转速度,数值越小速度越快
void setup() {
pinMode(Pin_A, OUTPUT);
pinMode(Pin_AA, OUTPUT);
pinMode(Pin_B, OUTPUT);
pinMode(Pin_BB, OUTPUT);
}
// 持续正向转动
void loop() {
digitalWrite(Pin_A, LOW);
digitalWrite(Pin_AA,HIGH);
digitalWrite(Pin_B, HIGH);
digitalWrite(Pin_BB,LOW);
delay(delayTime);
digitalWrite(Pin_A, LOW);
digitalWrite(Pin_AA,HIGH);
digitalWrite(Pin_B, LOW);
digitalWrite(Pin_BB,HIGH);
delay(delayTime);
digitalWrite(Pin_A, HIGH);
digitalWrite(Pin_AA,LOW);
digitalWrite(Pin_B, LOW);
digitalWrite(Pin_BB,HIGH);
delay(delayTime);
digitalWrite(Pin_A, HIGH);
digitalWrite(Pin_AA,LOW);
digitalWrite(Pin_B, HIGH);
digitalWrite(Pin_BB,LOW);
delay(delayTime);
}实验记录视频
【花雕学编程】Arduino动手做(226)---L298N驱动42步进电机
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之六:使步进电机以200 RPM 顺时针旋转然后逆时针旋转的简单程序
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之六:使步进电机以200 RPM 顺时针旋转然后逆时针旋转的简单程序
*/
//包含Arduino步进电机库
#include <Stepper.h>
//每次输出旋转一圈的步数
const int stepsPerRevolution = 300;
//创建Stepper库实例
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
//将速度设置为200 rpm
myStepper.setSpeed(200);
//初始化串行端口
Serial.begin(9600);
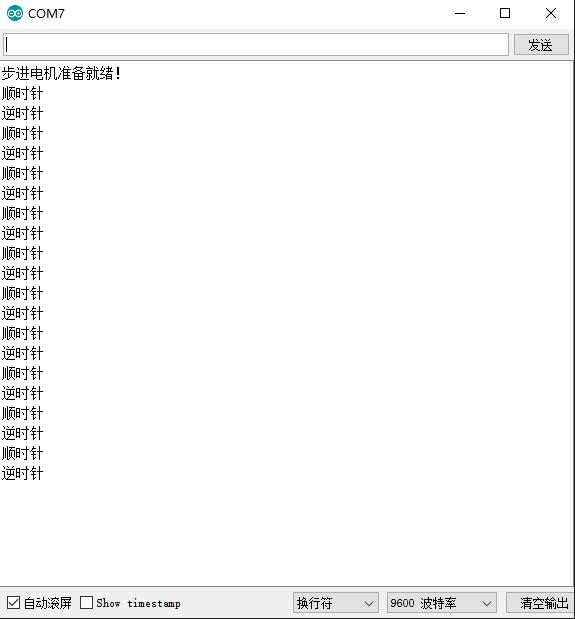
Serial.println("步进电机准备就绪!");
}
void loop() {
//朝着一个方向迈出一步(正向)
Serial.println("顺时针");
myStepper.step(stepsPerRevolution);
delay(600);
//朝着另一个方向迈出一步(反向)
Serial.println("逆时针");
myStepper.step(-stepsPerRevolution);
delay(600);
}实验串口返回情况
代码说明:
1、该程序首先包括 Arduino Stepper 库。步进库与 Arduino IDE 打包在一起,负责对发送到电机的脉冲进行排序。
// Include the Arduino Stepper Library
#include
2、包含库后,我们定义一个名为 stepsPerRevolution 的变量。顾名思义,它是您的电机额定每转的步数。在我们的例子中是 200。
// Number of steps per output rotation
const int stepsPerRevolution = 200;
3、接下来,我们创建 Stepper 库的对象。Stepper 类的构造函数将电机和 Arduino 引脚连接的每转步数作为参数。
// Create Instance of Stepper library
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
4、在代码的设置部分,我们通过调用 setSpeed() 函数来设置步进电机的速度,并初始化串行通信。
void setup()
{
// set the speed at 200 rpm:
myStepper.setSpeed(200);
// initialize the serial port:
Serial.begin(9600);
}
5、最后,在代码的循环部分,我们只需调用 step() 函数,该函数使电机以 setSpeed() 函数设置的速度转动特定数量的步数。将负数传递给此函数将反转电动机的旋转方向。
void loop()
{
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(600);
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(600);
}
6、请注意,step() 是一个阻塞函数。这意味着它将等到电机完成移动后,将控制权传递给程序中的下一行。例如,如果您将速度设置为 1 RPM 并在 100 步电机上调用 step(100),则此功能将需要整整一分钟才能完成。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之七:最简九行驱动程序
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之七:最简九行驱动程序
*/
#include <Stepper.h>
Stepper myStepper = Stepper(200, 8, 9, 10, 11);
void setup() {
myStepper.setSpeed(200);
}
void loop() {
myStepper.step(200);
delay(1000);
myStepper.step(-200);
delay(1000);
}上述代码的工作原理。
首先包括 Stepper.h 库,其中包含步进电机速度和方向控制所需的函数。
然后定义电机旋转一圈所需的步数。在这种情况下,我在全步模式下使用电机,步进电机类型移动 200 步以旋转 360 度。该值根据您使用的步进电机类型而变化,例如,如果它是 28BYJ-48 步进电机,则该值将为 48。
接下来,您需要创建 Stepper 类的新实例,该实例将电机和 Arduino 引脚连接的每转步数作为参数。
在 setup() 部分中,我们使用 setSpeed() 函数以 rpm 为单位设置电机的旋转速度。
在 loop() 部分中,首先使用 step() 方法顺时针旋转电机,并将每转的步数解析为其中的参数。因此,电机将以每转 200 次的步长旋转。为了逆时针旋转电机,我们将在 step() 方法中解析每转的步数,并带有负号。在两种类型的旋转之间,我们将有一个延迟。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
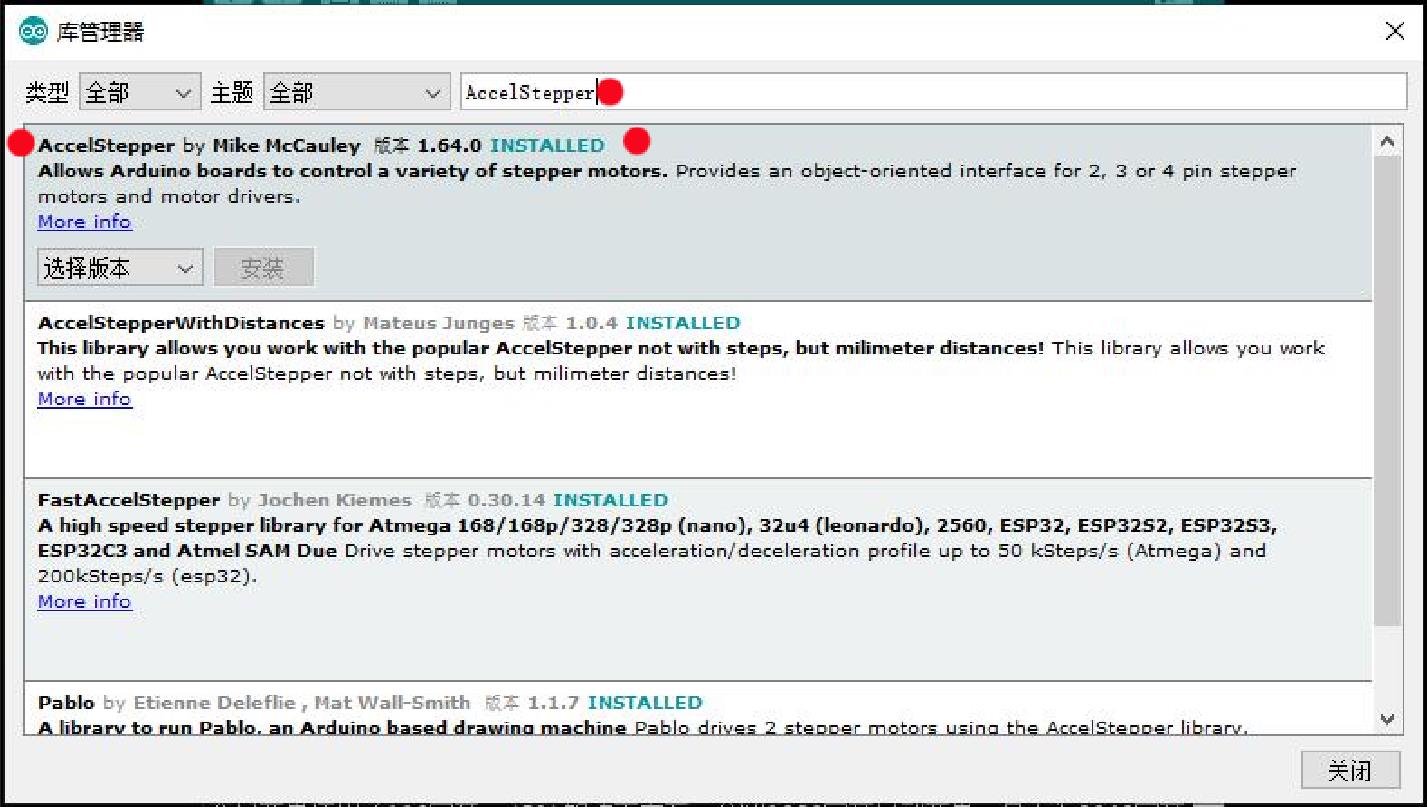
项目实验之八:使用 AccelStepper 库控制步进电机的速度、方向以及
步数和转数
安装AccelStepper 库
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机
项目实验之八:使用 AccelStepper 库控制步进电机的速度、方向以及
步数和转数
*/
#include <AccelStepper.h> // 引入AccelStepper库
#define MotorInterfaceType 4 // 定义电机接口类型为4线步进电机
// 创建一个AccelStepper对象,参数为接口类型和电机引脚
AccelStepper stepper = AccelStepper(MotorInterfaceType, 8, 9, 10, 11);
void setup() {
stepper.setMaxSpeed(1000); // 设置步进电机的最大速度
}
void loop() {
stepper.setCurrentPosition(0); // 将当前位置设为0
while (stepper.currentPosition() != 400) { // 当当前位置不等于400时
stepper.setSpeed(200); // 设置电机速度为200
stepper.runSpeed(); // 运行电机
}
delay(1000); // 延迟1秒
stepper.setCurrentPosition(0); // 将当前位置设为0
while (stepper.currentPosition() != -200) { // 当当前位置不等于-200时
stepper.setSpeed(-600); // 设置电机速度为-600
stepper.runSpeed(); // 运行电机
}
delay(1000); // 延迟1秒
}代码说明
首先包括 AccelStepper.h 库,然后定义电机接口类型。电机接口类型设置为 4,因为我们在全步模式下使用 4 线步进电机。
接下来,创建一个 AccelStepper 类的新实例,该实例具有适当的电机接口类型和与 Arduino 的连接。
在 setup() 部分中,定义最大速度(以每秒步数为单位)。
在 loop 部分,首先使用 setCurrentPosition(0) 方法将步进电机的当前位置设置为零。
while 循环会持续运行,直到循环内的条件变为 false。因此,在这种情况下,我们检查步进电机的当前位置是否不等于 400 步。虽然情况并非如此,但我们以 setSpeed() 方法设置的每秒 200 步的恒定速度运行步进电机,直到电机达到 400 步,即 2 转。runSpeed() 方法以 setSpeed() 方法设置的速度移动电机。
2 转后,电机延迟 1 秒,然后将电机的当前位置设置为零,并使用另一个 while 回路以每秒 600 步的速度向后运行电机,直到电机达到 -200 步或 1 转。


 他的勋章
他的勋章

评论