 返回首页
返回首页
 回到顶部
回到顶部
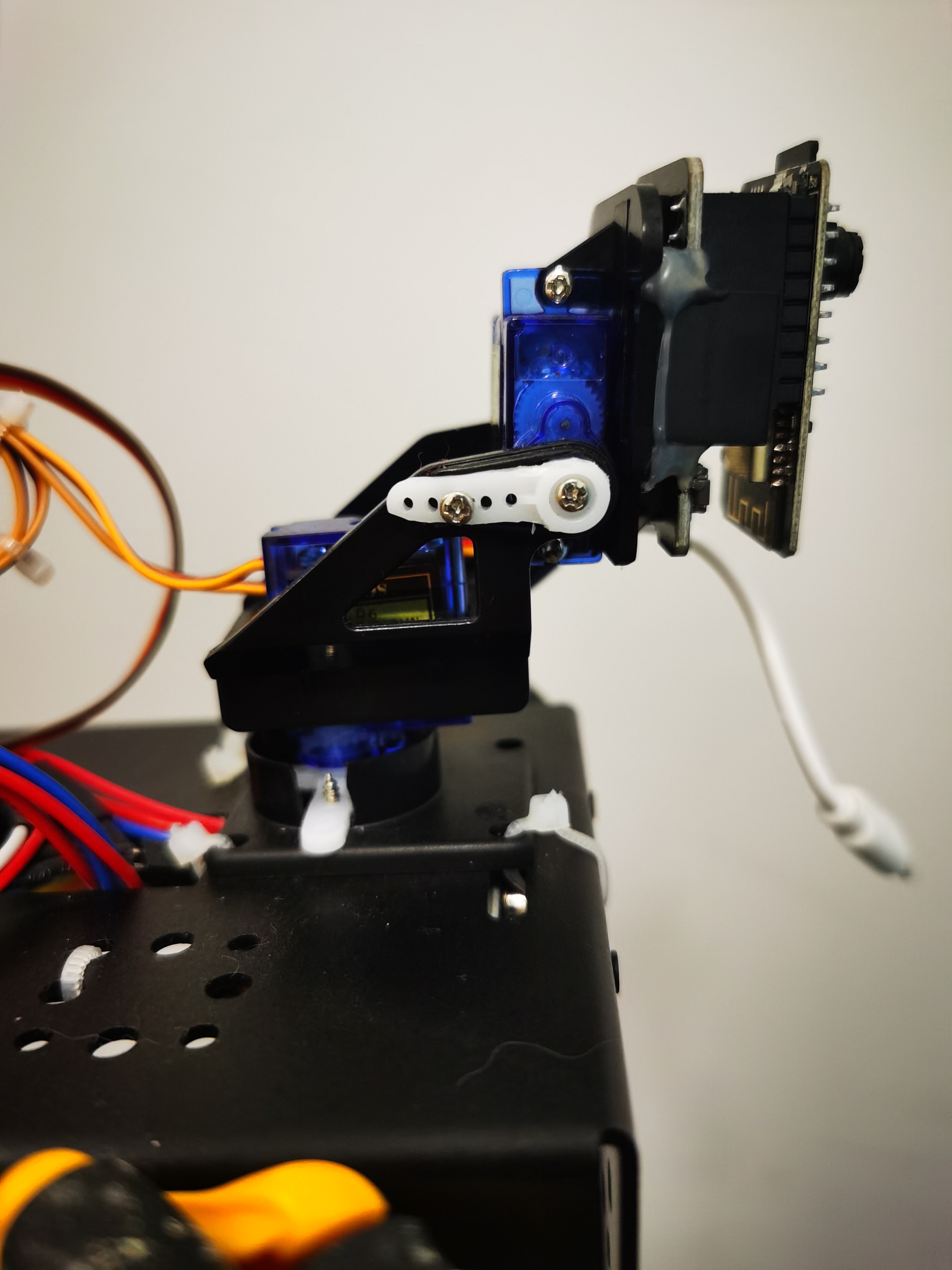
接前一篇文章(手柄摇杆控制麦克纳轮小车 ——无线电机驱动器V5.5- Makelog(造物记) (dfrobot.com.cn)),我购买的双180度舵机云台到货了。到货当天我忙完其他事情,立刻投入云台的组装。网上购买的云台都是散件,组装要割、磨、切,挺费时间的,不过我们就是享受这个过程。
舵机组装好后,拆掉原先小车上的云台。原先云台底座是360度的,转起来会把数据线缠绕。安装新的云台,接线、粘接摄像头、修改代码,调试运行。问题出现了!舵机动一下就不动了,特别不灵敏。原先的云台,我只接顶部的180度一个舵机,摇杆操作非常丝滑。两个舵机怎么不行了?我猜想是供电造成的,小车的摄像头我用单独的电池组供电,与主板的供电是分开的。想着从摄像头的电池组分出电流供电,但是手头缺一分二的杜邦线。原先给摄像头供电的电源线就是剪断杜邦线,焊接Micro-USB线,热缩管包线,做的很结实了。如果把改装后的摄像头的电源线再拆开接线,很容易造成损坏得不偿失。
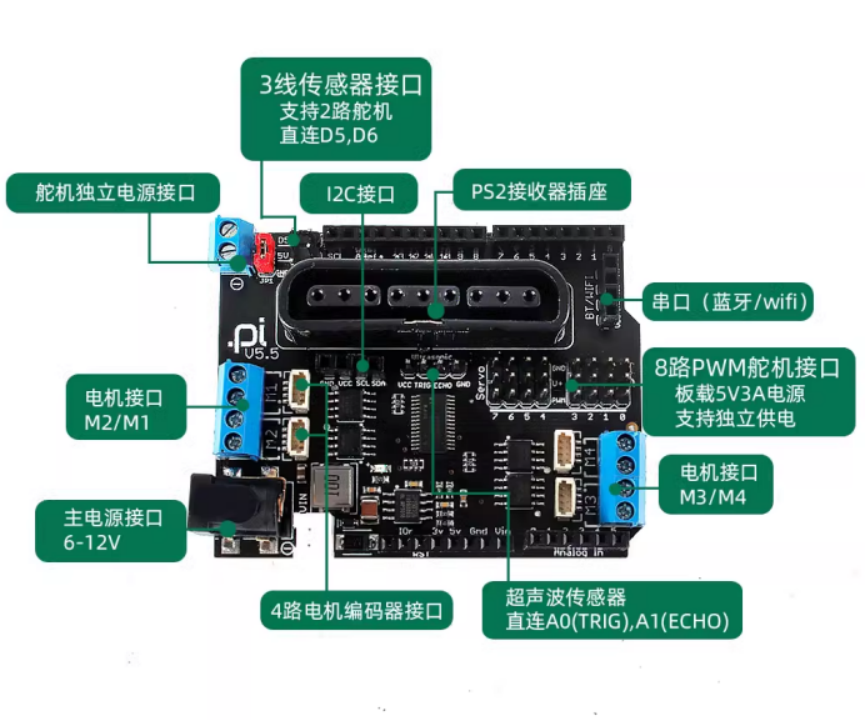
既然电源上目前想不到办法,就从程序和硬件接线上想办法。先改代码,把舵机的控制代码从小车的程序中分离出来,用遥控试了几遍舵机反应不灵敏,转一下不转一下的。看来必须改接口了,查看主板说明,找到扩展板左上角有舵机直连接口D5、D6。既然是直连主板代码就得用Mind+的舵机库,不是电机驱动板的舵机代码。
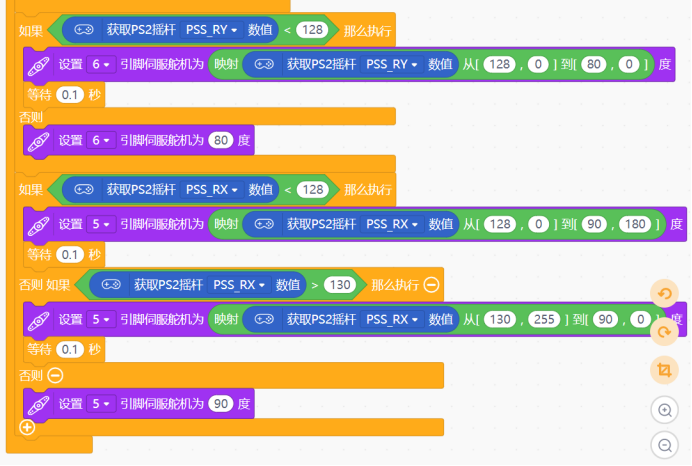
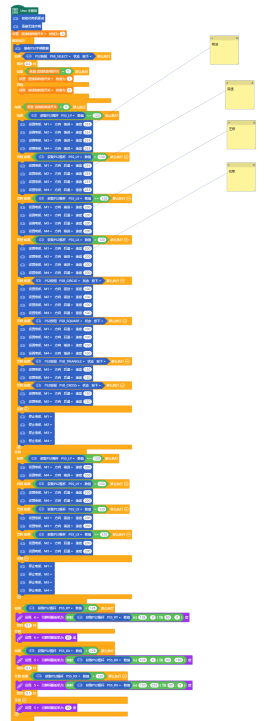
这次修改代码,重新用遥控调试,运行非常丝滑,成功了!这是摇臂控制云台舵机的代码部分。
全部程序代码
调试完小车已经深夜了,手机大概搜了几个一分二的杜邦线收藏了下来。第二天对比了多家的一分二,一分三的杜邦线,挑选了一家下单。等到货后用摄像头的电池供电试试,下一篇文章分享。


 他的勋章
他的勋章




评论