 返回首页
返回首页
 回到顶部
回到顶部

前段时间,辽宁的高级科技辅导员推荐给我一款好玩的硬件——奇果派无线电机驱动器V5。本学期学校里我一直忙着教学和科技社团的活动,没顾上研究这个硬件。临近期末考试了,校内举办了隆重的科技竞赛,邀请了区科协秘书长和区电教馆馆长参加。科技竞赛是我的一桩心事,结束了可以好好研究V5.5了。
1、奇果派无线电机驱动器V5简介
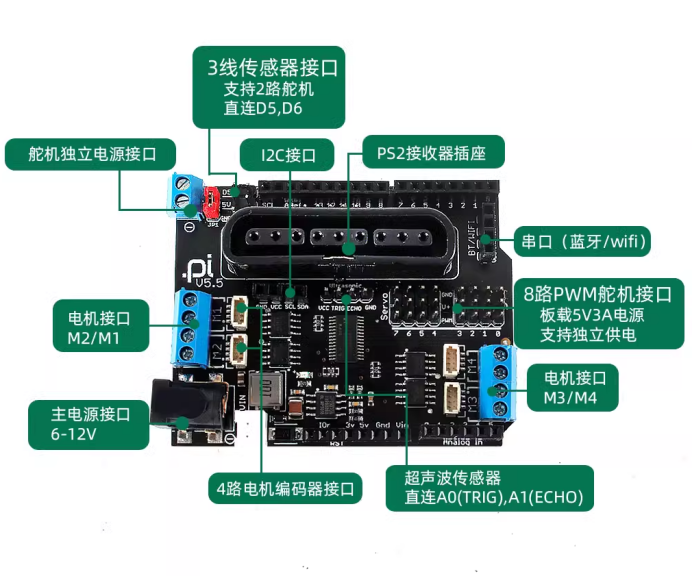
产品是基于Arduino开发运动机器人解决方案,电机驱动器功能极为强大,可以驱动4个直流电机或2个步进电机,并且额外提供8路全速PWM控制,可以控制8路舵机。支持PS2无线手柄,充分发挥PS2手柄的强大功能。
电机扩展板最大限度的减少Arduino引脚的占用,所以使用基于I2C通讯的专用PWM驱动芯片(PCA9685)控制电机的速度和方向。只用2根IO引脚(SDA&SCL)就可以驱动多个电机,也可以多个驱动器叠加使用(可级联),并且不干扰其他I2C设备的使用。支持超声波传感器,可以轻松对接智能小车或者其他电机控制的应用。

这个产品从图片看起来就高大上,好感度立刻上升!创客们都会爱不释手。关键是可以编程,Arduino IDE、米思齐、Mind+都可以,体验感超棒!!!这个产品主板、扩展板、遥控器三个加起来价格很亲民,适合创客们玩!!!
2. 电源接线
电源接线有两种常用方案,电机和舵机较少时选择第一种方案。
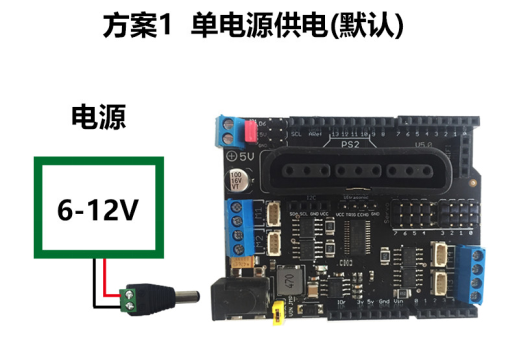
方案一是用单电源供电,单电源可同时为驱动器和开发板供电。板载内嵌5V稳压器,可为舵机端口提供5V 3A电源。电源输出功率要足够大,否则会影响稳定性。可以用可充电锂电池供电。
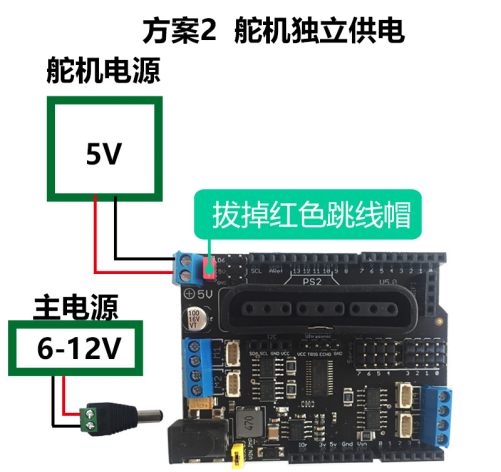
方案二是舵机独立供电,有多个舵机或大功率舵机的时候,选择此方案供电。先拔掉左上角跳线帽,断开板载电源。接上跟舵机匹配电压匹配的电源,注意匹配参数,大多数舵机耐压是5-6V,电压太高会使舵机烧毁。
2. 电机接线
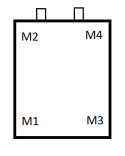
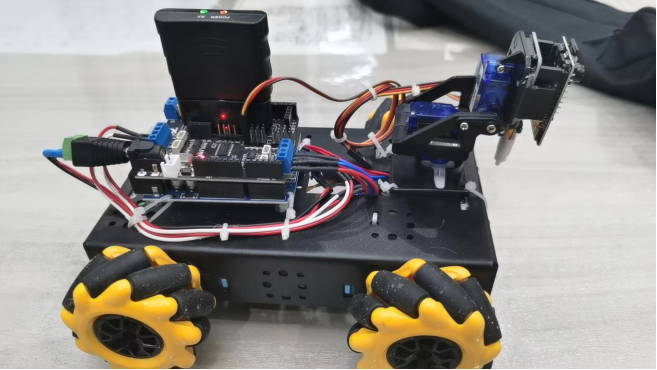
我手头正好有麦克纳轮小车底盘,用热熔胶固定主板,按照官方提供的接线图接线。
小车有四个轮子,要确定哪个电机是M1、M2,哪个是M3、M4,方法很简单在Mind+编程时可以试出来。
4.程序编写
官方提供了Arduino IDE和米思齐的程序代码,Mind+程序没有提供要自己编写。官方提供了米思齐和Mind+扩展库地址,本文最后提供官方的库文件下载。Mind+库文件下载后要选择本地库安装,方法如下图。
①下载库文件,解压缩
②打开Mind+软件,选择Arduino UNO主控板

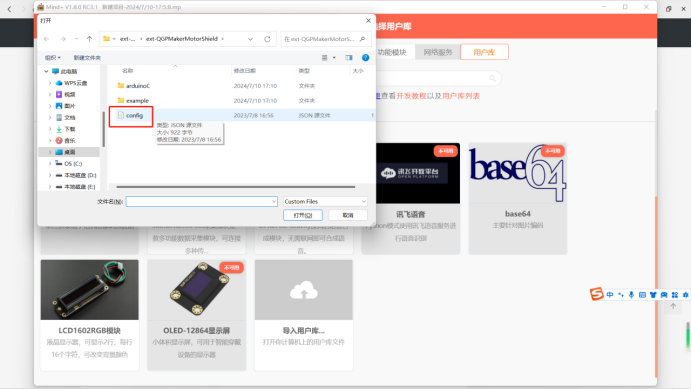
③打开用户库,选择导入用户库

④导入解压缩的库文件,注意选择文件夹里config文件。选中文件后迅速出现无线驱动器V5.5的图片,幸福不?

⑤库加载后返回编程界面,首先要做的是电机编号的检验。也就是确定4个电机,谁是M1、M2、M3、M4的问题。编程时代码要对照官方的手柄按键,逐个试电机。
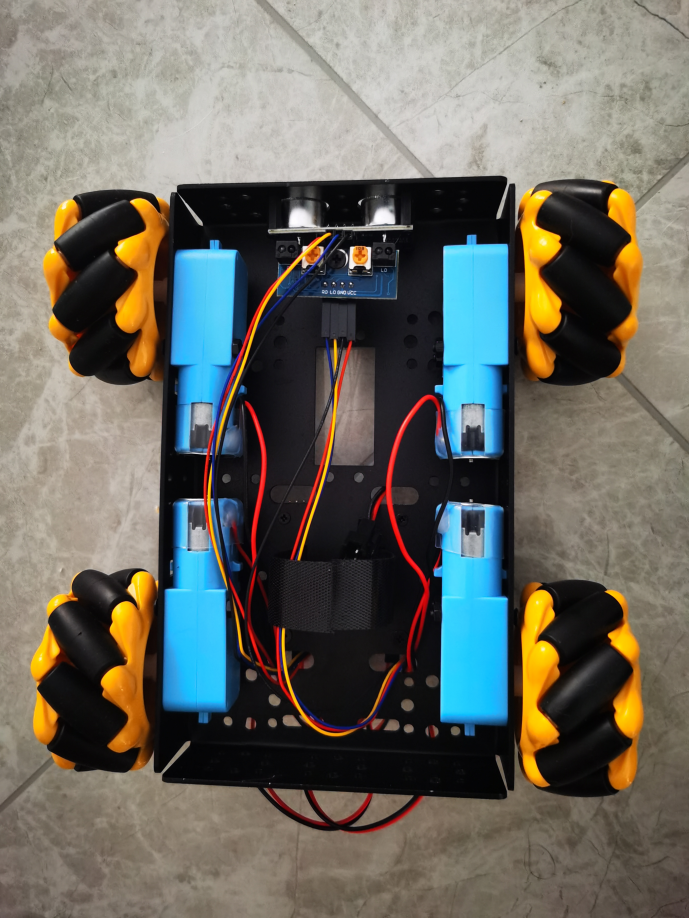

我试出来的电机是这样的,上方两个黑框是超声波传感器。
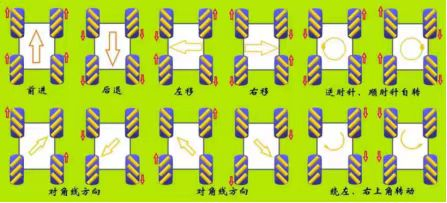
4. 用方向键控制麦克纳轮小车尝试
麦克纳轮小车的运动有12种形式,参照一下图片编写各种运动方式。
编程我尝试过了,用子函数的形式编写程序小车不运行。
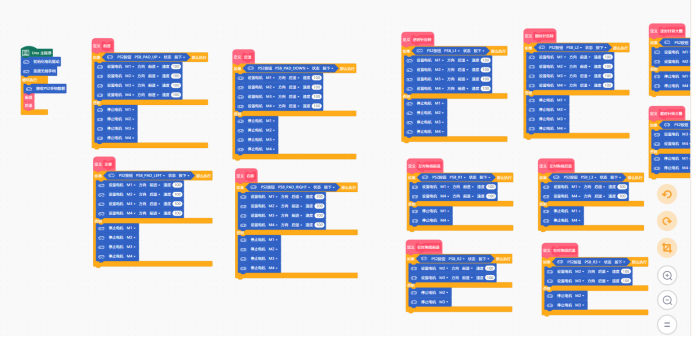
子函数程序上传时总是报错,看起来程序想简洁用子函数就是用不成!
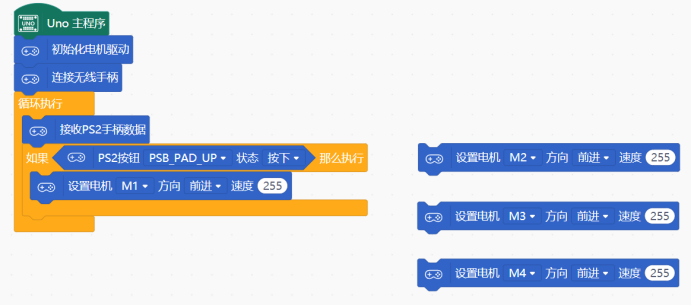
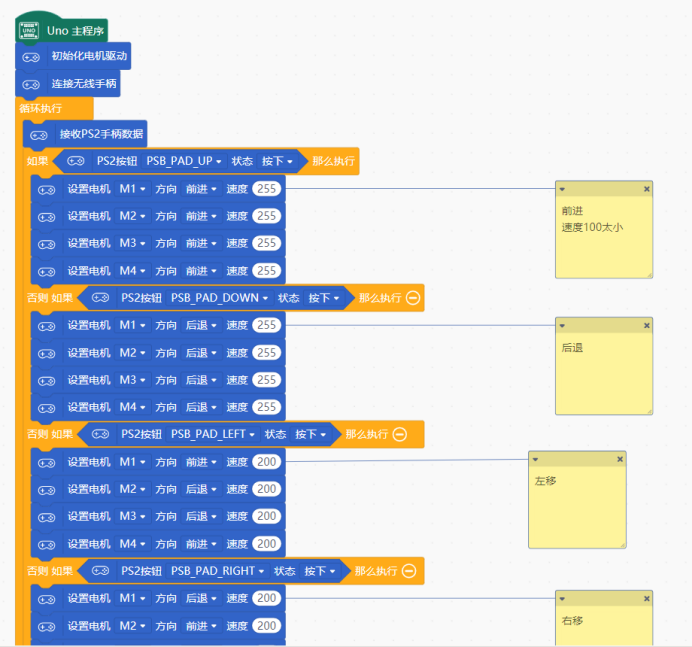
编程用如果……那么执行,小车运行时轮子晃一下就不动了。

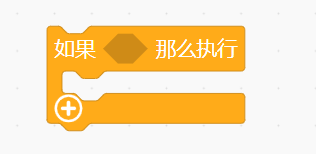
小车要能顺利运行,常用的编程方法行不通了。因为小车时刻在检测是按下了遥控器那个键,不按时立刻停止运动。而且电机速度设为100小车直线运动太慢了,就得255最大。最后想到了用如果……那么执行+,这个代码,小车顺利运动。
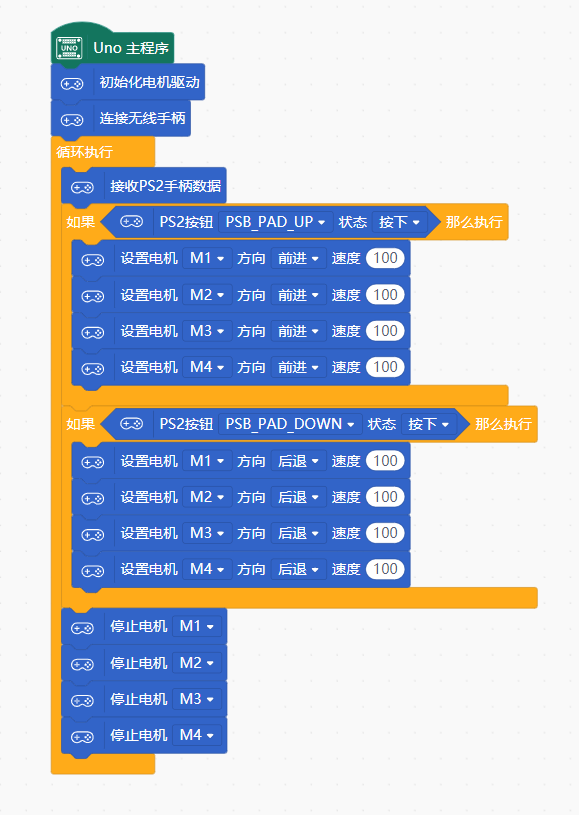
5. 正确代码


小车能够顺利动起来了,硬件体验感和编程成功感满级!!!


 他的勋章
他的勋章



评论