 返回首页
返回首页
 回到顶部
回到顶部
第三课:机器人做数学运算
一、情景引入
小麦知道了掌控板板载传感器和执行器的秘密后,心想:成为这么厉害的机器人,可不能太平庸了!小麦想到当时学习编程计算数学问题的知识,能不能在机器人里实现这些功能,小麦要让自己变成一个能力超群的机器人。
二、进阶学习
学习任务一
小麦想先用实时模式来解决加法数学运算的问题,首先要做的事同学们想到了吗?看小麦是怎么做的。
1.建立加数1和加数2两个变量
打开程序说做就做 图3-1
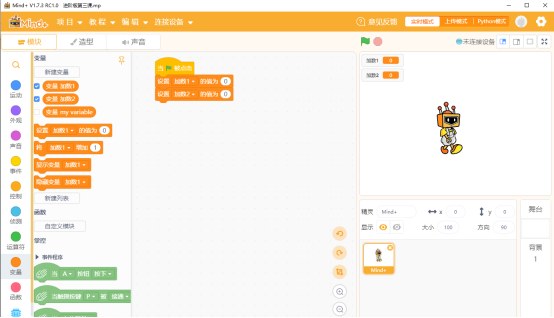
3-1
实时模式下的编程和上传模式下编程还是有很多不一样的地方,我们在学习的时候要注意对比哦。
2.在机器人编程中,我们可以借助掌控板上的按键来改变加数的数值,可以出现多种数值的加法运算。小麦用A键控制加数1,用B键控制加数2,并且把当前的数值都显示在掌控板的屏幕上。图3-2

3-2
3.通过摇一摇的方式来控制,将加数1和加数2相加,并且将得到的和显示在掌控板的屏幕上。图3-3
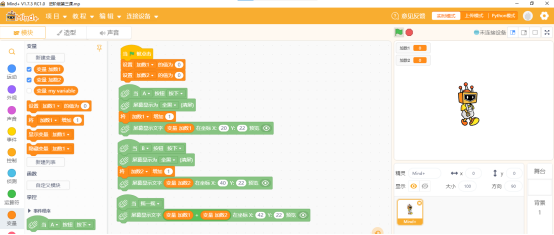
3-3
4.将掌控板连接电脑并与软件相连,看看效果。呀,有的数字离得太近了!不行,程序需要调整。调整如下。图3-4
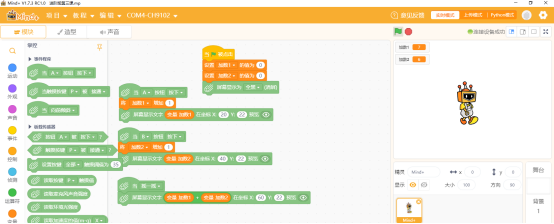
3-4
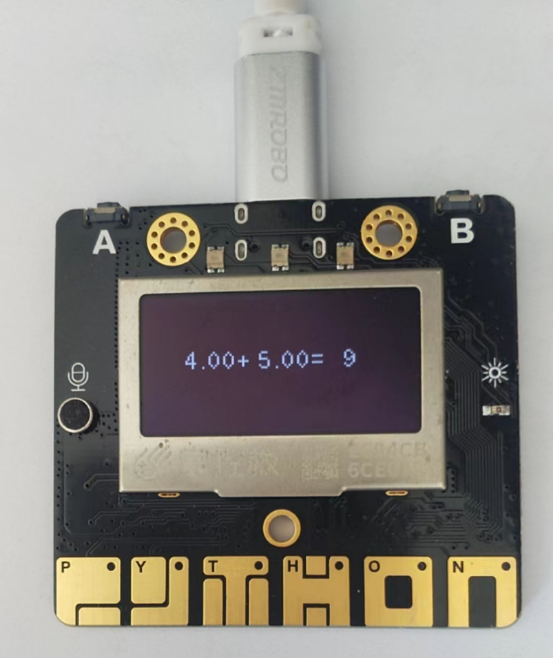
调整后的掌控板屏幕显示效果。图3-5

3-5
同学们可以根据上面的数字变化,再进一步完善掌控板屏幕数字显示效果,至于为什么这样调整我们以后再讲。
学习任务二
我们再学习一下上传模式的加法运算。小麦学起来总是要打破砂锅问到底。
1.设置加数1和加数2变量
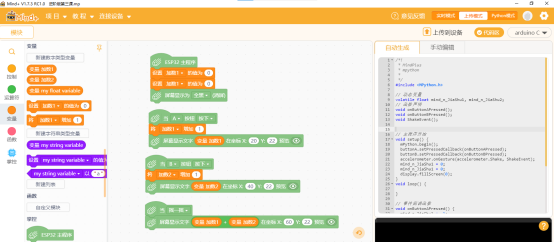
将编程界面调整到上传模式,并加载掌控板模块,在变量模块组建立加数1和加数2变量。图3-6
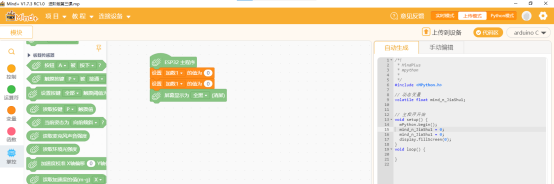
3-6
2.和实时模式下一样,用A键控制加数1,用B键控制加数2,并且把所有的当前数值都显示在掌控板的屏幕上。通过摇一摇的方式来控制将加数1和加数2相加,将得到的和显示在掌控板的屏幕上。图3-7
3-7
3. 将掌控板连接电脑并与软件相连,点击上传到设备,将程序烧录到掌控板,上传成功后测试。图3-8
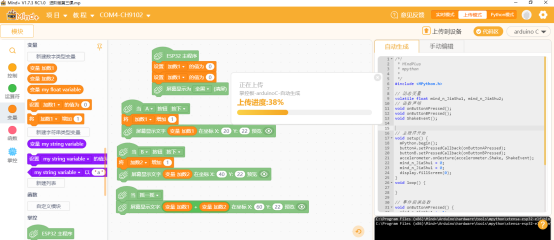
3-8
经过测试发现,清屏效果不好,用摇一摇方法由于掌控板移动过程中会产生摇动,所以将清屏改成用触摸键P,计算加数的和用触摸键N,效果很好。所以对程序进行调整后是下图的样子。图3-9
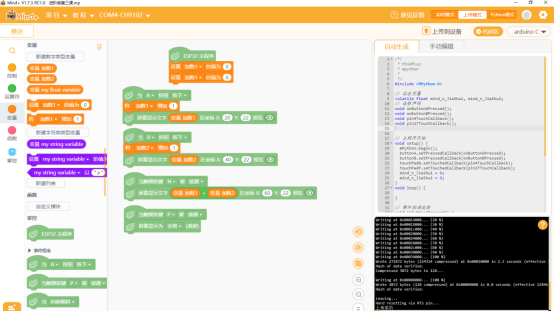
3-9
再来测试一下吧!刚刚好。图3-10

3-10
聪明的小麦边学边改进,使程序得到以进一步完善,你还想挑战小麦吗?那就要把程序完善的更好,用事实说话。
三、总结与收获
(一)学习目标:
1.掌握小麦做数学运算的代码命令模块,和来自哪个模块组。
2.熟悉实时模式和上传模式的相同点和区别。
3.理解机器人编程的编程过程和一般思路
(二)想法和收获
小麦总结要点是:实时模式下掌控板编程的程序和上传模式下掌控板编程的程序是不一样的,但是都可以得到我们进行运算的结果,只是使用的环境不一样。
学习手册:
四、知识拓展
试着总结实时模式下和上传模式下编程的区别与联系。
通过编程的方法完善掌控板屏幕显示的内容。图3-11
3-11


 他的勋章
他的勋章








评论