 返回首页
返回首页
 回到顶部
回到顶部
第二课:板载传感器的秘密
一、情景引入
小麦对掌控板非常感兴趣,想要揭开掌控板的秘密,又开始了机器人编程的学习之旅。以前的实时模式下,操作机器人掌控板是不能脱离电脑的辅助运行,这次小麦要用上传模式,在电脑里编程完成后,要把程序内容烧录到掌控板里离开电脑独立运行。呵,太了不起了!真正到了大显身手的时候了。开始吧!
二、进阶学习
说起传感器小麦访问了百度百科,百度百科里说:
传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。它是实现自动检测和自动控制的首要环节。传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。通常根据其基本感知功能,可分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。
这么多的功能啊。小麦决定先研究掌控板自带的传感器:声音传感器(麦克风)、光线传感器、磁场传感器(摇一摇)。
学习任务一
1.点击编程界面的上传模式,点击扩展按钮选中掌控板,加载到程序里,然后返回到编程界面。图2-1
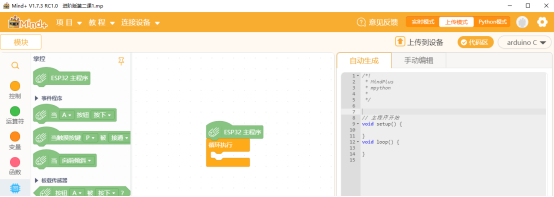
2-1
2.编写程序测试麦克风感知声音强弱,做一个噪音检测器.图2-2

2-2
3.将掌控板与电脑相连接,并且在编程软件里相连接,点击界面右上角的上传到设备,界面出现上传进度条,等到上传成功后界面右下方出现“上传成功”。一般我们把这个过程称做烧录。图2-3
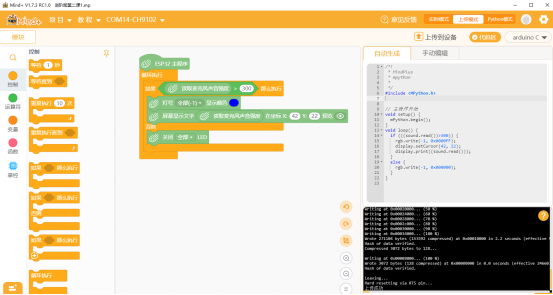
2-3
此时掌控板检测到电脑旁边的声音值是大于300的,出现灯光不断闪亮,屏幕出现的数值是2603。随着掌控板的移动声音值的大小不断变化。图2-4

2-4
这时,小麦发现看到当灯光不亮的时候数值也是很大,这是什么原因能?原来还是我们的程序有漏洞,小麦试着更改着程序。如图2-5
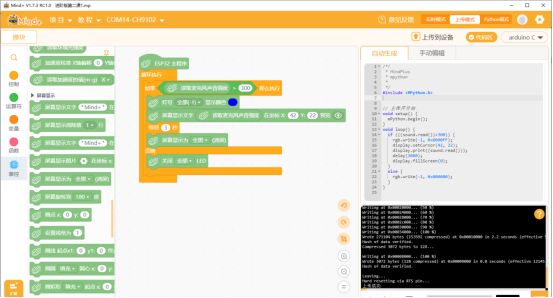
2-5
4.可以试着调整参考数值大小,看看有什么变化。
学习任务二
1.编写程序测试光线传感器,感知光线强弱,做一个光线检测器。
编写程序,光线亮度大只有屏幕显示光线数值,如果光线强度小于10,掌控板清屏显示当前光线值,板载的蜂鸣器播放音乐两秒钟后三个灯全亮蓝色光线三秒钟后重新检测光线强度,如果光线强度大于10,不播放声音、三个灯全不亮。编写程序完成后连接掌控板,将程序烧录到掌控板里。图2-6
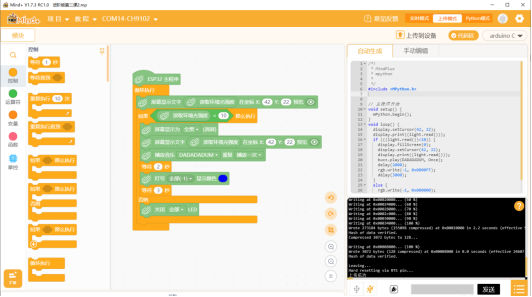
2-6
2.等待上传成功后,开始检测程序。开始灯不亮是因为光线数值为80,此时为正常室内光线,光线比较亮。图2-7
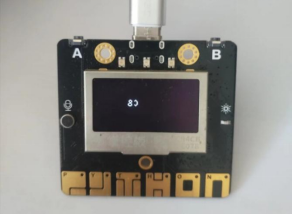
2-7
在实际测试的时候小麦发现:用手将掌控板遮挡后,灯开始亮,又不亮,说明遮挡掌控板后光线变暗,数值小于10,当灯亮起来光线值大于10,灯又关闭。将光线传感器遮挡后播放音乐、灯光亮,数值为4。分析两种情况的原因。图2-8
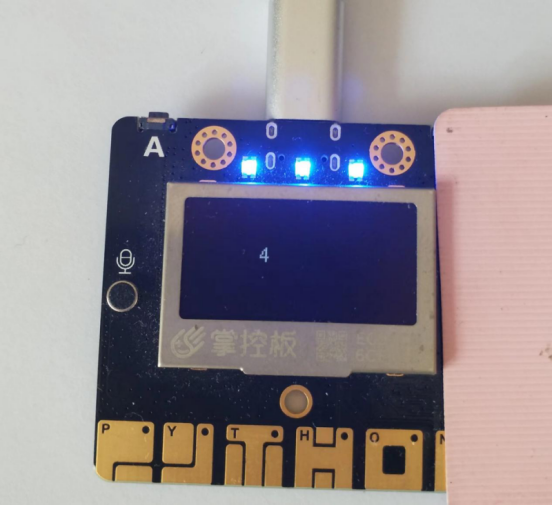
2-8
3.试着对程序数值进行调整,看看调整后与调整前有什么不同,寻找规律。
学习任务三
1.编写程序,做一个计数器
新建变量 item 图2-9
2-9
2.当掌控板摇动一下,变量就增加数值1,并将数值显示在屏幕上。将编好的程序烧录到掌控板。图2-10
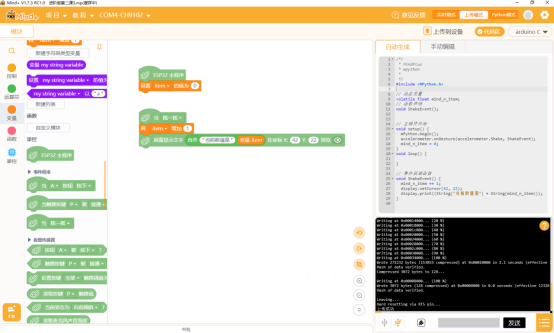
2-10
3.测试掌控板,每摇动一次掌控板数值增加1,符合预期结果。图2-11
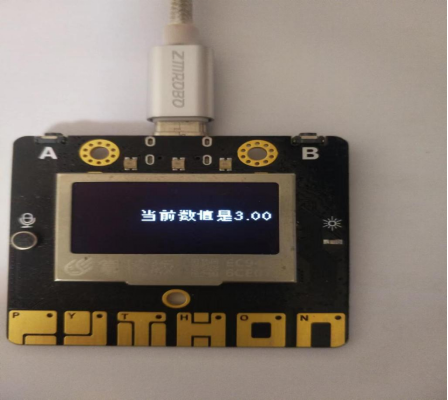
2-11
小麦与掌控板合为一体,变成了一个真正的机器人,小麦初次体验传感器的秘密成功了,小麦将进行新的探索,我们拭目以待吧!
三、总结与收获
(一)学习目标
1.掌握小麦操作机器人编程的代码命令模块,和来自哪个模块组。
2.熟悉机器人编程和烧录的操作。
3.理解编程的一般思路
(二)想法和收获
小麦总结的要点是:掌控板的传感器探秘其实离不开执行器,小麦感觉到的声音值,要通过掌控板的屏幕显示,通过喇叭将乐曲播放出来。感知光线强度数值显示在屏幕上,通过灯光来提醒。摇一摇的数值变化通过屏幕显示,等等……都是相互结合使用,各自发挥自己的优势功能,才能完成一个完美的程序设计。
学习手册:
四、知识拓展
继续完善改进光强度检测器,声音检测器,计数器的功能和使用的体验性。


 他的勋章
他的勋章








评论