 返回首页
返回首页
 回到顶部
回到顶部
我从《超能陆战队》中“大白”的角色产生灵感,特别羡慕主人公有“大白”这样的好朋友,所以就想自己也制作一个能跟着我的“小白”,不管我走到哪,它都能跟着我。
一般人们用超声波传器传感器做避障小车,感应到某个数值的时候小车就停止或转弯,我想能不能反过来,感应不到障碍的时候就停止,感应到障碍的时候就转向障碍物方向移动,然后跟着障碍物的方向进行移动,就像人在走,小宠物跟着的效果。
要让小车跟着障碍走,并不停判断障碍的位置,我设想用两个超声波,左边一个,右边一个,然后两个超声波返回的数值,判断哪边有物体,后来老师提示可以让舵机带动超声波来回转动,用左边返回的值和右边返回的值,也可以实现相同的功能。
基本思路:就是当超声波转向左边测得的数值和转向右边测得的数值都小于40时,可以判定前方有障碍物,所以小车按一定的速度前进;当左边的数值小于40,而右边的数值大于40时,判定左边有障碍,小车向左行驶;相反,左边数值小于40而右边小于40时,右边有障碍,小车右转,向右行驶;当两边的数值都大于40时,判定没有障碍,小车停止。
硬件清单:
制作过程:
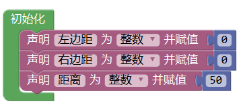
1、米思奇编写程序。先定义两个变量,分别是左边距和右边距,用舵机转动的两个角度确定超声波左、右返回的数值。

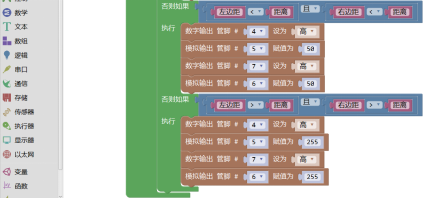
2、主程序因为有4种情况,所以用:如果——否则如果语句。如果左边距小于50(初始化里加了一个变量距离,这样就不用需要改变数值的时候,手动一个个改)且右边距大小50,左电机7、6管脚(7是数字管脚高电平,6模拟管脚设定电机转动速度,范围0—255,255停止,0慢),以10的速度转动,右电机4、5管脚以100的速度,向左行驶。否则如果左大于50,右小于50,左以100速度,右以10速度,向右行驶。当左和右都小于50时,左和右都以50的速度,直线行驶;否则如果左和右都大于50时,左、右都255,电机停止转动。

3、先连接主板,TT电机驱动模块和超声波,制作小车底盘。纸板画出“小白”造型,头如图,用瓦楞纸圈起来,粘贴在一起,裁纸刀刻出超声波的位置,当眼睛,胶枪固定。
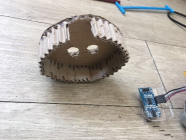


4、吸管用胶枪粘成“工”字形,一头和90度舵机固定,一头和超声波支架固定,效果如图。

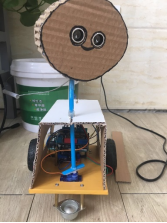
5、如图,割一块硬纸板,两边留孔,方便主板接源和下载程序。中间留孔,方便吸管插进去,热熔胶固定,身体和后面的纸板热熔胶粘贴,最后效果如图。



6、下载程序,测试。


 他的勋章
他的勋章




评论