 返回首页
返回首页
 回到顶部
回到顶部
Arduino是一个开放源码的电子原型平台,它可以让你用简单的硬件和软件来创建各种互动的项目。Arduino的核心是一个微控制器板,它可以通过一系列的引脚来连接各种传感器、执行器、显示器等外部设备。Arduino的编程是基于C/C++语言的,你可以使用Arduino IDE(集成开发环境)来编写、编译和上传代码到Arduino板上。Arduino还有一个丰富的库和社区,你可以利用它们来扩展Arduino的功能和学习Arduino的知识。
Arduino的特点是:
1、开放源码:Arduino的硬件和软件都是开放源码的,你可以自由地修改、复制和分享它们。
2、易用:Arduino的硬件和软件都是为初学者和非专业人士设计的,你可以轻松地上手和使用它们。
3、便宜:Arduino的硬件和软件都是非常经济的,你可以用很低的成本来实现你的想法。
4、多样:Arduino有多种型号和版本,你可以根据你的需要和喜好来选择合适的Arduino板。
5、创新:Arduino可以让你用电子的方式来表达你的创意和想象,你可以用Arduino来制作各种有趣和有用的项目,如机器人、智能家居、艺术装置等。

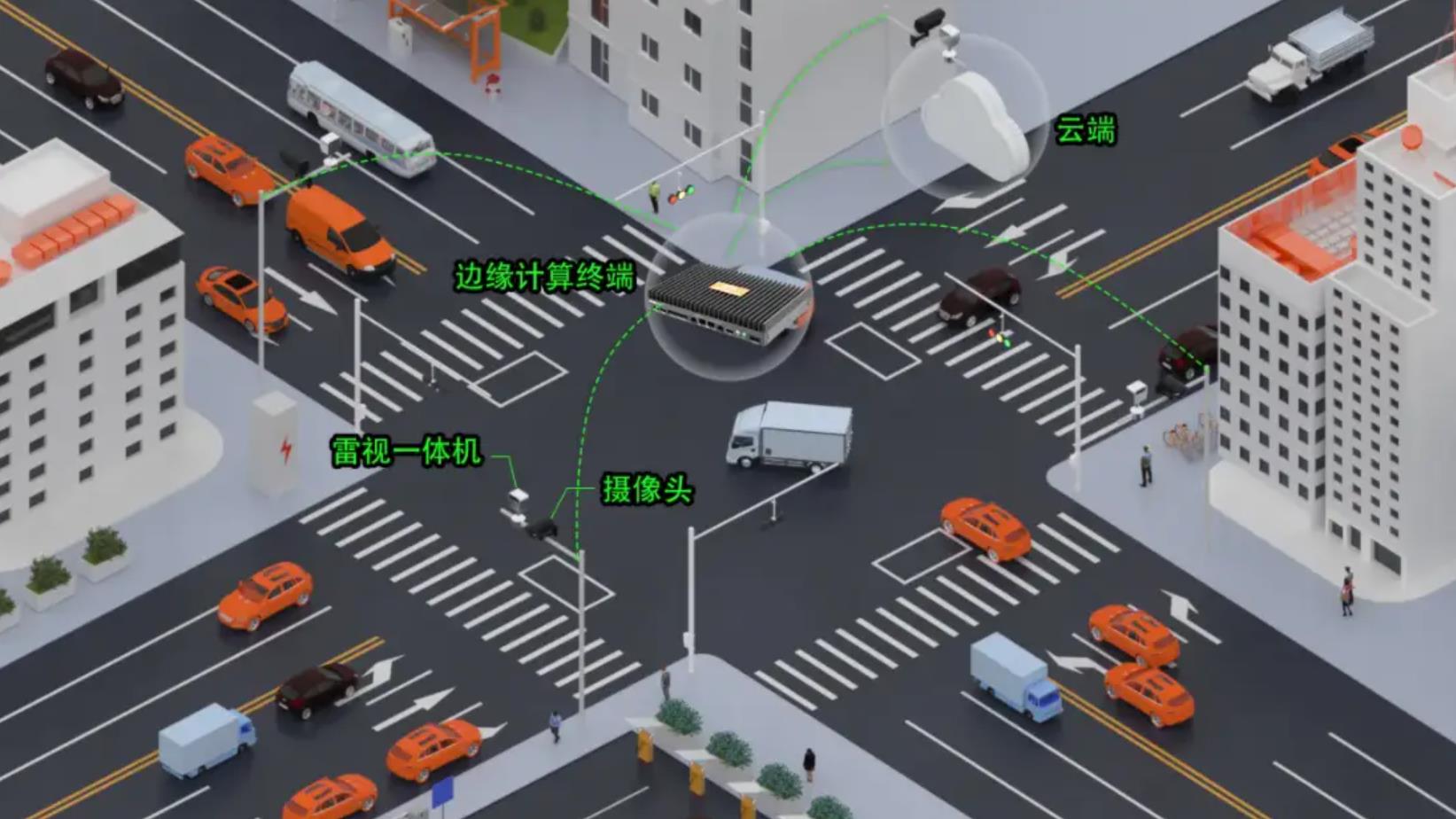
Arduino智慧交通是一种基于Arduino技术的智能交通系统,旨在提供交通管理和优化方案。下面将详细解释其主要特点、应用场景以及需要注意的事项。
主要特点:
1、实时数据采集和处理功能:系统可以通过连接传感器和Arduino控制器,实时采集交通相关数据,如交通流量、车辆速度、道路状态等。通过数据处理和分析,可以生成实时的交通信息和统计数据。
2、智能交通控制和优化功能:系统可以根据采集到的数据,实现智能的交通控制和优化。通过控制信号灯、调整道路限速、优化车辆流量等方式,改善交通拥堵、提高交通效率。
3、交通事故预警和安全管理功能:系统可以通过数据分析和模式识别,实现交通事故的预警和安全管理。一旦检测到异常情况,如交通事故风险区域、超速行驶等,可以及时发出警报并采取相应的安全措施。
4、用户信息服务和智能导航功能:系统可以向用户提供实时的交通信息服务和智能导航功能。通过连接到移动设备或车载导航系统,为用户提供最佳的路线规划、交通拥堵提示等服务。
应用场景:
1、城市交通管理:系统可应用于城市交通管理,通过智能交通控制和优化,改善交通拥堵、提高交通效率。可以在城市主要道路、交叉口等关键位置部署传感器和控制装置,实现交通流量的实时监测和控制。
2、高速公路管理:系统可用于高速公路的交通管理。通过部署传感器和摄像头,实时监测车辆流量、限速情况等,并提供交通事故预警和安全管理服务,提高高速公路的安全性和通行效率。
3、智能车辆导航和驾驶辅助:系统可与车载导航系统集成,为驾驶员提供智能导航和交通信息服务。通过实时的交通信息和路况提示,帮助驾驶员选择最佳路线,避免交通拥堵和事故风险。
需要注意的事项:
1、数据隐私和安全:在采集和处理交通数据时,需要保护用户的隐私和数据安全。合理采用数据加密、访问控制等措施,确保交通数据不被泄露或滥用。
2、系统可靠性和稳定性:智慧交通系统需要具备高可靠性和稳定性,以确保交通信息的准确性和实时性。系统的硬件设备和软件应具备良好的稳定性和容错性,以应对突发状况和故障。
3、法律法规和道路安全:在使用智慧交通系统时,需要遵守相关的法律法规和道路安全规定。系统设计和使用应符合交通法规,保障交通安全和秩序。
总结而言,Arduino智慧交通具有实时数据采集和处理、智能交通控制和优化、交通事故预警和安全管理、用户信息服务和智能导航等主要特点。它适用于城市交通管理、高速公路管理和智能车辆导航等场景。在使用此技术时,需要注意数据隐私和安全、系统可靠性和稳定性,以及法律法规和道路安全等事项。
Arduino智慧交通之停车场空位监测与导航程序是一种基于Arduino平台开发的智慧交通解决方案。下面我将以专业的视角为您详细解释该程序的主要特点、应用场景以及需要注意的事项。
主要特点:
停车位监测:该程序利用Arduino板和传感器技术,可以实时监测停车场内每个停车位的占用情况。通过安装传感器或使用计算机视觉技术,可以检测车辆是否停放在停车位上,并将数据反馈给程序进行处理。数据处理与分析:Arduino智慧交通程序可以收集和处理大量的停车位数据。通过数据处理和分析算法,可以实时计算停车位的空闲或占用状态,并提供准确的空位信息。导航功能:该程序可以根据停车场的实时空位信息,为驾驶员提供导航功能。驾驶员可以在导航设备上或手机应用上查看停车场的空位分布,并导航至最近的空闲停车位,提高停车效率。用户界面友好:Arduino智慧交通程序通常具有用户友好的界面,可以直观地显示停车场的空位分布图、导航路径和其他相关信息。用户可以轻松地进行操作和查看所需的信息。应用场景:
市区停车场:该程序适用于市区停车场,包括室内和室外停车场。通过实时监测和导航功能,可以帮助驾驶员快速找到空闲停车位,减少寻找停车位的时间和交通拥堵。商业中心和购物中心:在商业中心和购物中心等高密度的停车场环境中,停车位监测与导航程序可以提供实时的停车位信息,为驾驶员提供方便快捷的停车服务,提高顾客满意度。机场和车站:在机场和车站等交通枢纽场所,停车场常常庞大且复杂。通过使用Arduino智慧交通程序,可以有效管理停车场,减少停车位的浪费和拥堵,提供便捷的停车导航服务。智能停车楼和地下停车场:Arduino智慧交通程序可适用于智能停车楼和地下停车场,通过传感器技术监测停车位占用情况,并为驾驶员提供准确的空位导航,提高停车楼和地下停车场的利用率和效率。需要注意的事项:
传感器选择:在选择停车位监测传感器时,需要考虑其准确性、稳定性和适应不同环境的能力。根据具体停车场的特点选择合适的传感器类型,例如磁敏传感器、压力传感器或计算机视觉技术等。数据准确性:停车位监测与导航程序的准确性对于用户体验至关重要。确保传感器和数据处理算法的准确性,以提供可靠的停车位信息和导航指引。通信和数据安全:停车场空位监测与导航程序通常需要与其他设备或系统进行通信,例如导航设备或云服务器。确保通信过程的安全性和数据的保护,以防止数据泄露或未经授权的访问。可靠性和维护:智慧停车场系统需要具备可靠性和稳定性,以确保长期运行和有效的停车导航。定期进行传感器的校准和设备的维护,以及及时处理故障和问题,是确保系统可靠性的关键。法律和隐私:停车场空位监测与导航程序涉及到用户的位置信息和车辆信息,需要遵守相关的法律法规和隐私政策。在设计和实施时,需要采取适当的措施来保护用户隐私和合规性。综上所述,Arduino智慧交通之停车场空位监测与导航程序具有停车位监测、数据处理与分析、导航功能和用户界面友好等主要特点。它适用于市区停车场、商业中心、机场、车站和智能停车楼等场景,并需要注意传感器选择、数据准确性、通信和数据安全、可靠性和维护,以及法律和隐私等事项。希望这些信息对您有所帮助。

下面是几个实际运用程序参考代码案例,涉及Arduino智慧交通中的停车场空位监测与导航:
案例1、停车场空位监测:
const int sensorPin = A0;
const int threshold = 500;
void setup() {
pinMode(sensorPin, INPUT);
Serial.begin(9600);
}
void loop() {
int sensorValue = analogRead(sensorPin);
if (sensorValue < threshold) {
Serial.println("Parking space available");
} else {
Serial.println("Parking space occupied");
}
delay(1000);
}要点解读:
在setup()函数中,通过pinMode()函数将传感器引脚设置为输入模式。
在loop()函数中,使用analogRead()函数读取传感器的值。
根据传感器值与阈值的比较,判断停车位是否被占用。
使用Serial.println()函数向串口打印停车位状态信息。
使用delay()函数控制状态检测的时间间隔。
案例2、停车场导航显示:
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 16, 2);
const int sensorPin = A0;
const int threshold = 500;
void setup() {
lcd.begin(16, 2);
lcd.print("Parking: ");
pinMode(sensorPin, INPUT);
Serial.begin(9600);
}
void loop() {
int sensorValue = analogRead(sensorPin);
if (sensorValue < threshold) {
lcd.setCursor(9, 0);
lcd.print("Available");
Serial.println("Parking space available");
} else {
lcd.setCursor(9, 0);
lcd.print("Occupied ");
Serial.println("Parking space occupied");
}
delay(1000);
}要点解读:
在setup()函数中,通过lcd.begin()函数初始化LCD显示屏,设置显示行数和列数。
使用lcd.print()函数在显示屏上打印初始文本。
在loop()函数中,使用analogRead()函数读取传感器的值。
根据传感器值与阈值的比较,判断停车位是否被占用,并在LCD显示屏上更新相应的信息。
使用Serial.println()函数向串口打印停车位状态信息。
使用delay()函数控制状态检测和显示更新的时间间隔。
案例3、停车场导航语音提示:
#include <SoftwareSerial.h>
#include <DFRobotDFPlayerMini.h>
SoftwareSerial mySoftwareSerial(10, 11); // 软串口连接DFPlayer Mini
DFRobotDFPlayerMini myDFPlayer;
const int sensorPin = A0;
const int threshold = 500;
void setup() {
mySoftwareSerial.begin(9600);
Serial.begin(9600);
if (!myDFPlayer.begin(mySoftwareSerial)) {
Serial.println("Unable to begin:");
Serial.println("1.Please recheck the connection!");
Serial.println("2.Please insert the SD card!");
while (true);
}
myDFPlayer.volume(20); // 设置音量(0-30)
myDFPlayer.outputDevice(DFPLAYER_DEVICE_SD);
pinMode(sensorPin, INPUT);
}
void loop() {
int sensorValue = analogRead(sensorPin);
if (sensorValue < threshold) {
Serial.println("Parking space available");
myDFPlayer.play(1); // 播放音频文件1
} else {
Serial.println("Parking space occupied");
myDFPlayer.play(2); // 播放音频文件2
}
delay(1000);
}要点解读:
在setup()函数中,通过SoftwareSerial库创建一个软串口对象,并将其连接到DFPlayer Mini,同时初始化串口通信。
使用myDFPlayer.begin()函数初始化DFPlayer Mini,如果失败则打印错误信息并停止程序。
使用myDFPlayer.volume()函数设置音量大小。
使用myDFPlayer.outputDevice()函数设置音频输出设备为SD卡。
在loop()函数中,使用analogRead()函数读取传感器的值。
根据传感器值与阈值这些示例代码提供了Arduino智慧交通中停车场空位监测与导航的实际运用程序参考。它们可以根据具体需求进行修改和扩展,以适应不同的停车场场景。关键的要点如下:
1、停车场空位监测:
使用模拟输入(analogRead)读取传感器的值。
通过设定阈值(threshold)来判断停车位是否被占用。
使用串口(Serial)打印停车位状态信息。
2、停车场导航显示:
使用LiquidCrystal_I2C库控制I2C接口的液晶显示屏。
初始化显示屏,并打印初始文本。
根据传感器值与阈值的比较,在显示屏上更新相应的停车位状态信息。
3、停车场导航语音提示:
使用SoftwareSerial库创建一个软串口对象,并将其连接到DFPlayer Mini音频模块。
初始化DFPlayer Mini,并设置音量和音频输出设备。
根据传感器值与阈值的比较,在串口上打印相应的停车位状态信息,并通过DFPlayer Mini播放相应的音频文件。
这些示例代码演示了不同的停车场智能化方案,从简单的串口打印到更复杂的液晶显示和语音提示。根据项目需求和预算,可以选择适合自己的方案,并根据具体情况进行修改和扩展。

以下是几个实际运用的Arduino智慧交通停车场空位监测与导航程序的参考代码案例,并给予要点解读:
案例4、停车场空位监测程序
// 定义超声波传感器引脚
const int trigPin = 2;
const int echoPin = 3;
// 定义LED指示灯引脚
const int ledPin = 13;
// 定义停车场空位数量
int availableSpaces = 0;
void setup() {
// 配置超声波传感器引脚
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// 配置LED指示灯引脚
pinMode(ledPin, OUTPUT);
// 初始化串口通信
Serial.begin(9600);
}
void loop() {
// 触发超声波传感器
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// 接收超声波回波时间
long duration = pulseIn(echoPin, HIGH);
// 计算距离(假设声音速度为340m/s)
float distance = duration * 0.034 / 2;
// 判断空位数量
if (distance > 10 && distance < 200) {
// 有空位
digitalWrite(ledPin, HIGH);
availableSpaces++;
} else {
// 没有空位
digitalWrite(ledPin, LOW);
}
// 输出空位数量到串口
Serial.print("Available Spaces: ");
Serial.println(availableSpaces);
// 延迟一段时间
delay(1000);
}要点解读:
使用超声波传感器来检测停车位的可用性,并通过LED指示灯和串口输出进行反馈。
在setup()函数中,配置超声波传感器引脚为输出和输入,配置LED指示灯引脚为输出,并初始化串口通信。
在loop()函数中,触发超声波传感器并接收回波时间,根据测量距离判断停车位的可用性。如果距离在10到200之间,则认为有停车位可用,并点亮LED指示灯。然后输出可用停车位数量到串口,并延迟一段时间。
案例5、停车场导航程序
// 定义超声波传感器引脚
const int trigPin = 2;
const int echoPin = 3;
// 定义LED指示灯引脚
const int ledPin = 13;
// 定义停车位状态
enum ParkingSpaceState {
AVAILABLE,
OCCUPIED
};
// 定义停车位数组
ParkingSpaceState parkingSpaces[5];
void setup() {
// 配置超声波传感器引脚
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// 配置LED指示灯引脚
pinMode(ledPin, OUTPUT);
// 初始化停车位状态
for (int i = 0; i < 5; i++) {
parkingSpaces[i] = AVAILABLE;
}
}
void loop() {
// 触发超声波传感器
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// 接收超声波回波时间
long duration = pulseIn(echoPin, HIGH);
// 计算距离(假设声音速度为340m/s)
float distance = duration * 0.034 / 2;
// 判断停车位状态
if (distance > 10 && distance < 200) {
// 有车辆停在该停车位上
digitalWrite(ledPin, HIGH);
int nearestSpace = findNearestAvailableSpace();
if (nearestSpace != -1) {
parkingSpaces[nearestSpace] = OCCUPIED;
}
} else{
// 没有车辆停在该停车位上
digitalWrite(ledPin, LOW);
int nearestSpace = findNearestOccupiedSpace();
if (nearestSpace != -1) {
parkingSpaces[nearestSpace] = AVAILABLE;
}
}
// 延迟一段时间
delay(1000);
}
// 寻找最近的可用停车位
int findNearestAvailableSpace() {
for (int i = 0; i < 5; i++) {
if (parkingSpaces[i] == AVAILABLE) {
return i;
}
}
return -1;
}
// 寻找最近的被占用停车位
int findNearestOccupiedSpace() {
for (int i = 0; i < 5; i++) {
if (parkingSpaces[i] == OCCUPIED) {
return i;
}
}
return -1;
}要点解读:
使用超声波传感器来检测停车位的可用性,并通过LED指示灯和停车位状态数组进行反馈。
在setup()函数中,配置超声波传感器引脚为输出和输入,配置LED指示灯引脚为输出,并初始化停车位状态数组为全部可用。
在loop()函数中,触发超声波传感器并接收回波时间,根据测量距离判断停车位的状态。如果距离在10到200之间,则认为有车辆停在该停车位上,并点亮LED指示灯。根据停车位状态更新停车位数组。
使用findNearestAvailableSpace()函数和findNearestOccupiedSpace()函数分别寻找最近的可用停车位和被占用停车位的索引。
案例6、停车场空位监测与导航程序
// 定义超声波传感器引脚
const int trigPin = 2;
const int echoPin = 3;
// 定义LED指示灯引脚
const int ledPin = 13;
// 定义停车位状态
enum ParkingSpaceState {
AVAILABLE,
OCCUPIED
};
// 定义停车位数组
ParkingSpaceState parkingSpaces[5];
void setup() {
// 配置超声波传感器引脚
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// 配置LED指示灯引脚
pinMode(ledPin, OUTPUT);
// 初始化停车位状态
for (int i = 0; i < 5; i++) {
parkingSpaces[i] = AVAILABLE;
}
// 初始化串口通信
Serial.begin(9600);
}
void loop() {
// 触发超声波传感器
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// 接收超声波回波时间
long duration = pulseIn(echoPin, HIGH);
// 计算距离(假设声音速度为340m/s)
float distance = duration * 0.034 / 2;
// 判断停车位状态
if (distance > 10 && distance < 200) {
// 有车辆停在该停车位上
digitalWrite(ledPin, HIGH);
int nearestSpace = findNearestAvailableSpace();
if (nearestSpace != -1) {
parkingSpaces[nearestSpace] = OCCUPIED;
}
} else {
// 没有车辆停在该停车位上
digitalWrite(ledPin, LOW);
int nearestSpace = findNearestOccupiedSpace();
if (nearestSpace != -1) {
parkingSpaces[nearestSpace] = AVAILABLE;
}
}
// 输出停车位状态到串口
Serial.println("Parking Spaces:");
for (int i = 0; i < 5; i++) {
if (parkingSpaces[i] == AVAILABLE) {
Serial.println("Space " + String(i) + ": Available");
} else {
Serial.println("Space " + String(i) + ": Occupied");
}
}
// 延迟一段时间
delay(1000);
}
// 寻找最近的可用停车位
int findNearestAvailableSpace() {
for (int i = 0; i < 5; i++) {
if (parkingSpaces[i] == AVAILABLE) {
return i;
}
}
return -1;
}
// 寻找最近的被占用停车位
int findNearestOccupiedSpace() {
for (int i = 0; i < 5; i++) {
if (parkingSpaces[i] == OCCUPIED) {
return i;
}
}
return -1;
}要点解读:
这个程序结合了停车位空位监测和导航功能。
在setup()函数中,配置超声波传感器引脚为输出和输入,配置LED指示灯引脚为输出,并初始化停车位状态数组为全部可用。同时初始化串口通信。
在loop()函数中,触发超声波传感器并接收回波时间,根据测量距离判断停车位的状态。如果距离在10到200之间,则认为有车辆停在该停车位上,并点亮LED指示灯。根据停车位状态更新停车位数组。
在loop()函数中,输出停车位状态到串口,以便进行监测和导航显示。使用串口通信可以将停车位状态传输到其他设备或显示器。
使用findNearestAvailableSpace()函数和findNearestOccupiedSpace()函数分别寻找最近的可用停车位和被占用停车位的索引。
这些参考代码案例演示了如何使用Arduino来实现停车场空位监测和导航功能。通过超声波传感器测量距离,判断停车位的可用性,并通过LED指示灯和停车位状态数组进行反馈。在第三个案例中,还添加了通过串口通信输出停车位状态的功能,可以与其他设备进行数据传输和显示。这些代码可以根据具体的硬件配置和需求进行修改和扩展。
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。



 他的勋章
他的勋章

三春牛-创客2024.05.02
不错