 返回首页
返回首页
 回到顶部
回到顶部

项目背景
X星球,由于世界各国之间矛盾不断,爆发了核战争,人类被迫转入地下居住。星球表面终日笼罩着烟雾、有毒气体,大气环境异常变化。
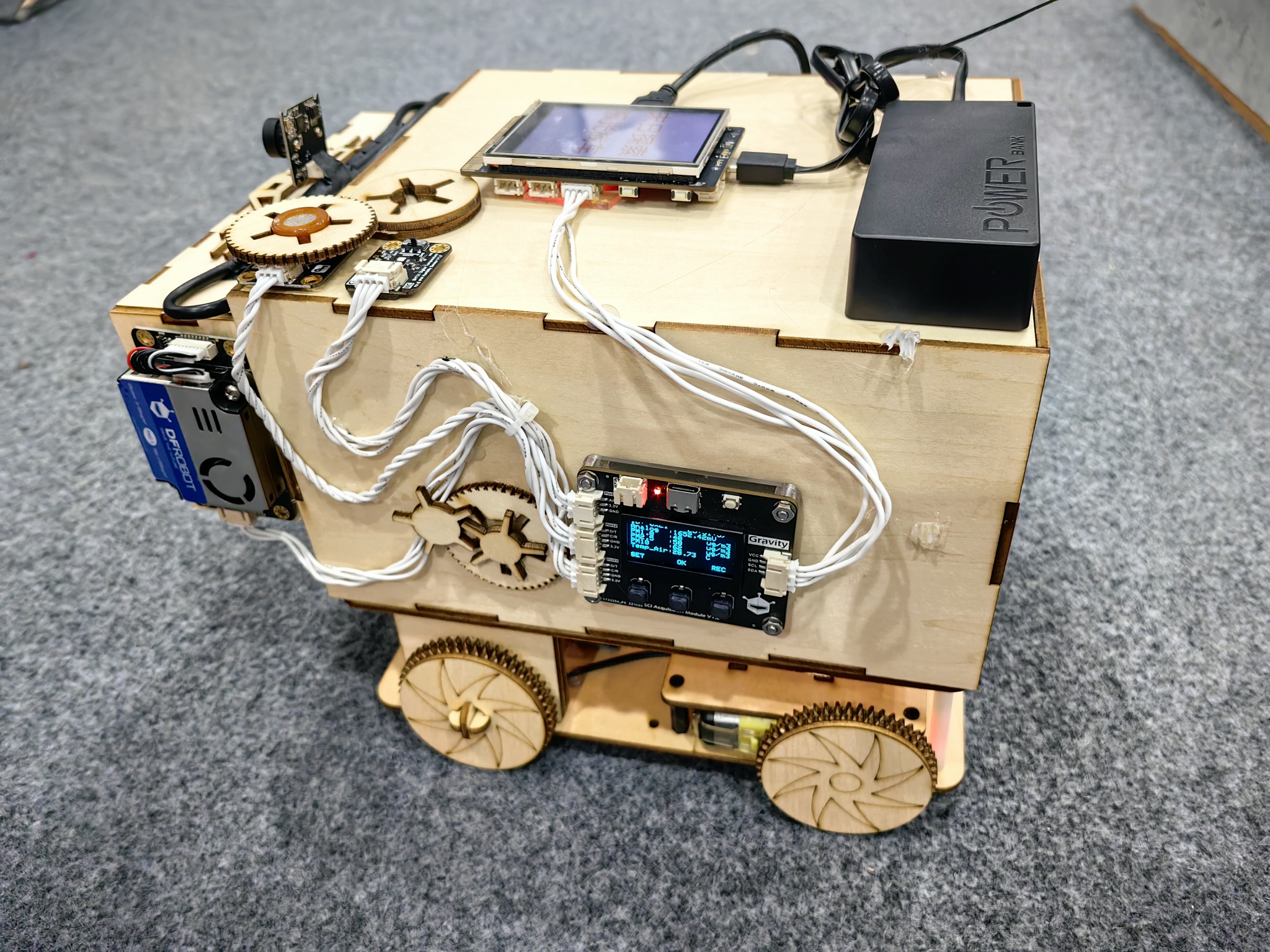
几十年后,大气环境逐渐趋于平稳,为了检测各个地面的环境,人们造出了末日环境之极光探险战车。可以远程操作战车在地表形式,并实时回传画面及各项环境参数。
步骤1 制作过程及遇到的问题
确定了作品方向及目标后,开始制作过程分成后面的几个步骤
碰到的问题:
1、制作过程中碰到一个神奇的问题,电机驱动板本来已经调试好了,可以控制马达正转反转了,结果第二天要继续做的时候确怎么也动不了,没时间调试,换了一个其他类型的驱动板继续完成作品。
2、可视化界面不够方便。如果可以更自由的排版及设计就更好了,还有增加一些可编程的交互,比如收到数据后,可以切换页面等等。
3、摄像头连接行空板有时会卡,不知道是不是路由器问题。
4、可视化界面会自动断开和SIOT的连接。
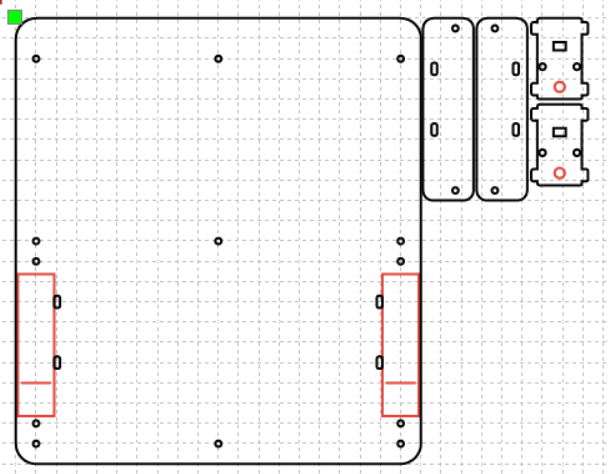
步骤2 底盘元件连接及测试
设计底盘结构,并组装,将左右TT马达连接到电机驱动板上,通过ESP32连接SIOT。

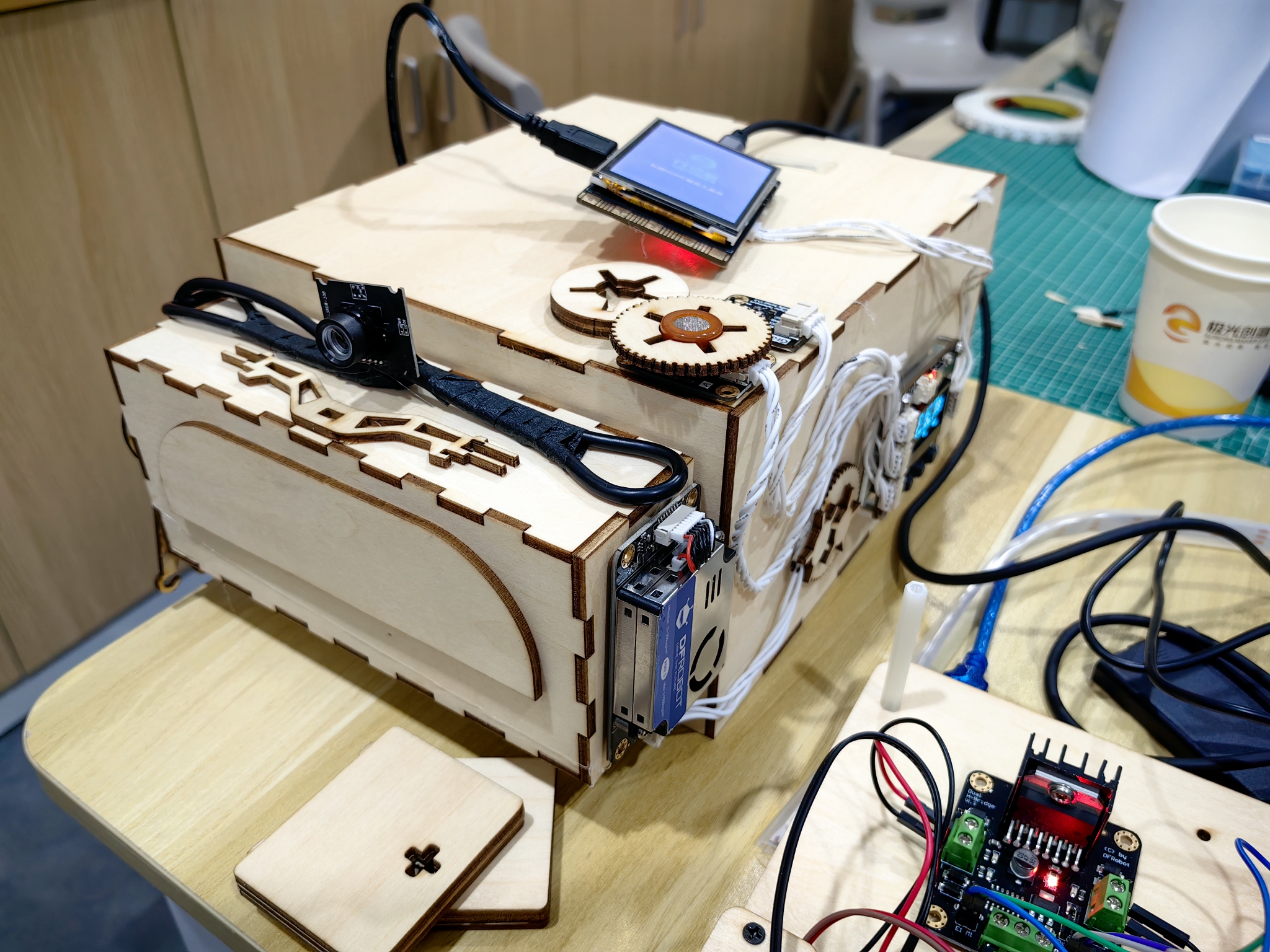
步骤3 车体的元件连接及测试
设计车体结构并组装,将PM2.5传感器、一氧化碳传感器、温湿度传感器连接到SCI采集模块上。
采集模块连接到行空板。摄像头也连接到行空板。
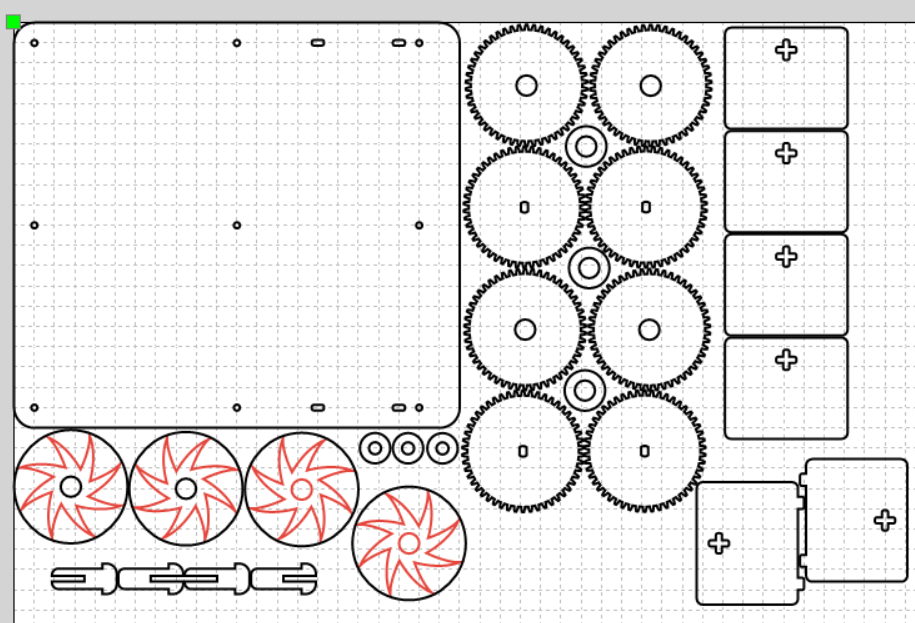
步骤4 切割并组装轮子

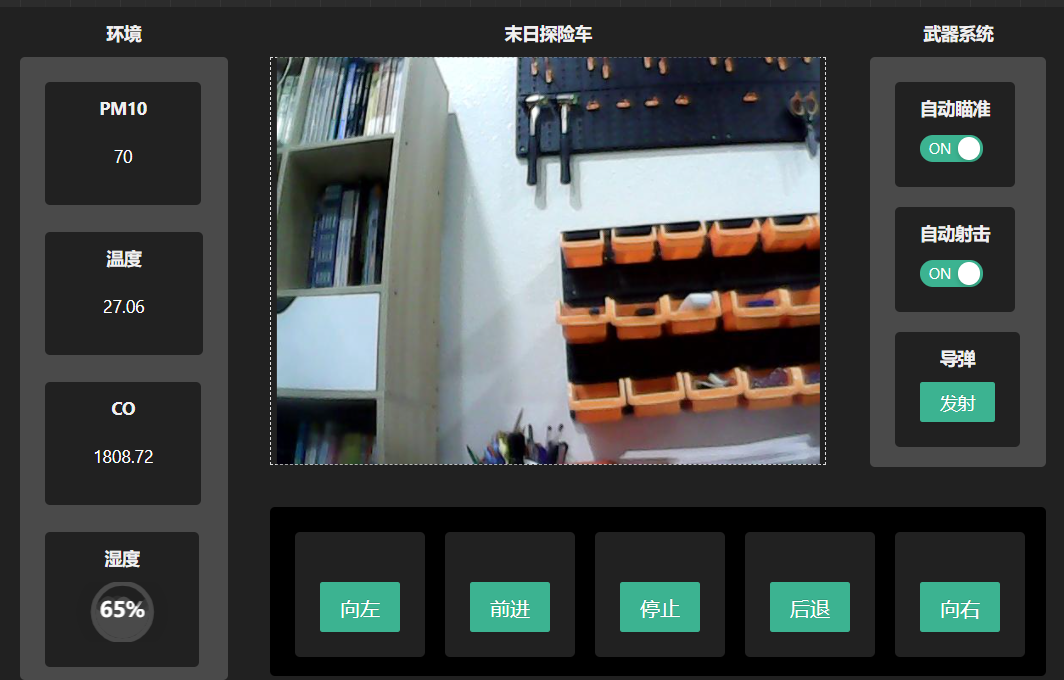
步骤5 编写可视化界面
可视化界面的编辑不够方便,颜色不好调,定位不好调,控件大小也不好调。花了挺多时间调整也只能让界面看起来协调一些。希望可视化界面的功能能更丰富些。
如果可以进行简单的编辑就更好了,比如接收到数据,可以切换页面。
步骤6 将底盘和车体组合起来调试
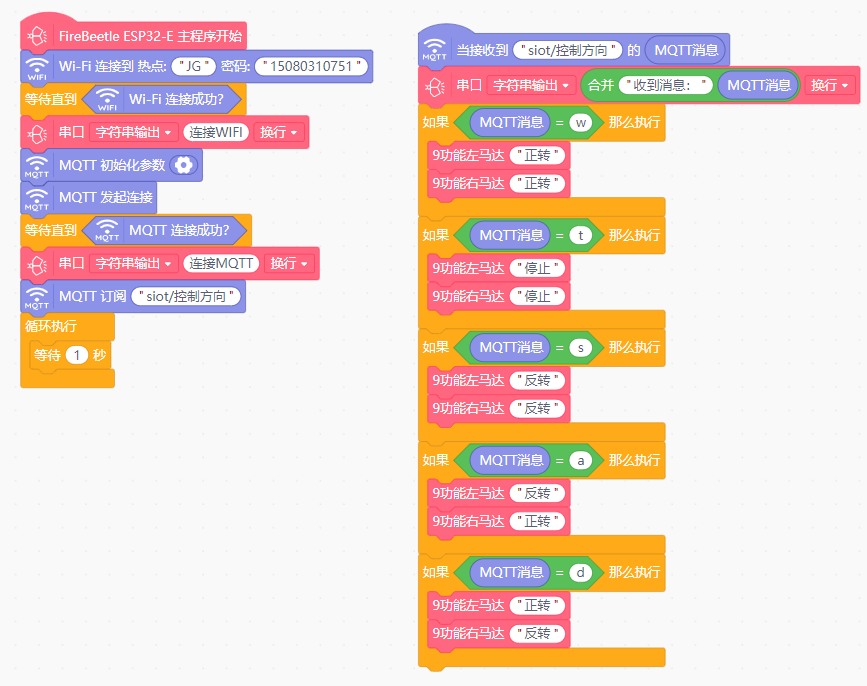
步骤7 ESP32程序
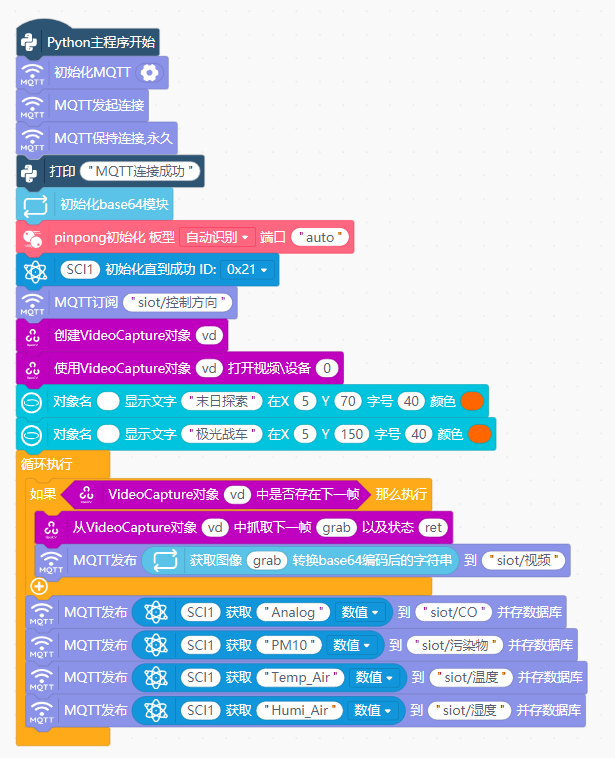
步骤8 行空板程序


 他的勋章
他的勋章
9mm2023.08.30
6