 返回首页
返回首页
 回到顶部
回到顶部

一、项目介绍
“魔镜传奇 勇敢救小猪”是一款交互型迷宫闯关游戏。它和普通迷宫区别在于不仅要根据强大的思维逻辑能力找出迷宫路径还要完成开源硬件交互关卡才能通过!
做这个项目的创意来源是在书店看到我家4岁小朋友特别喜欢看闯迷宫的游戏,并且乐此不疲。我就想着给她增加游戏乐趣。因此,想到了把开源硬件和普通迷宫整合在一起。
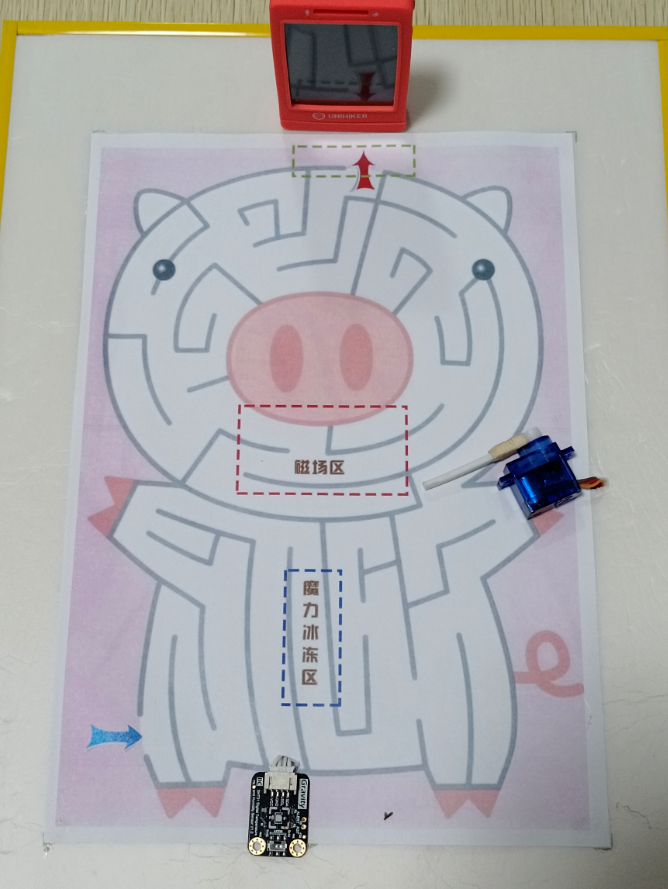
在拯救小猪的路上设置有四个交互关卡,分别是魔力冰冻区、隐藏机关门、磁场风暴区和魔镜归位区。
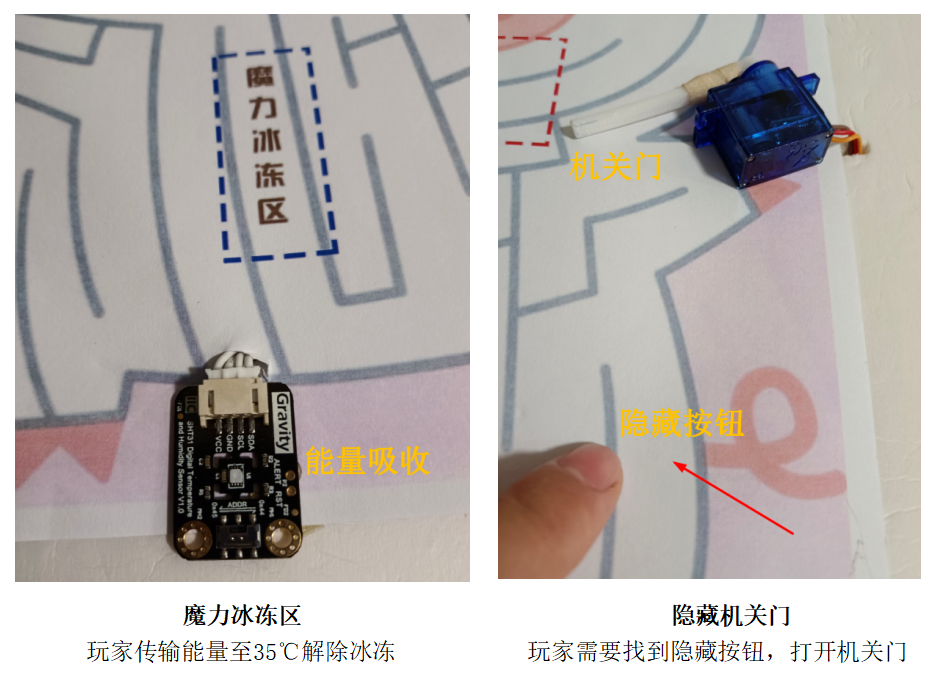
魔力冰冻区是假设迷宫必经之路上某处存在一个特殊的魔力冰冻区,异常“寒冷”,需要玩家传输能量(热量)到温度传感器,温度达到35摄氏度,才能解除冰冻,通过魔力冰冻区。
隐藏机关门是一个由舵机和按钮组成的系统,玩家需要根据“魔镜”路线提示找到隐藏按钮,按下开关才能打开机关门(舵机)。
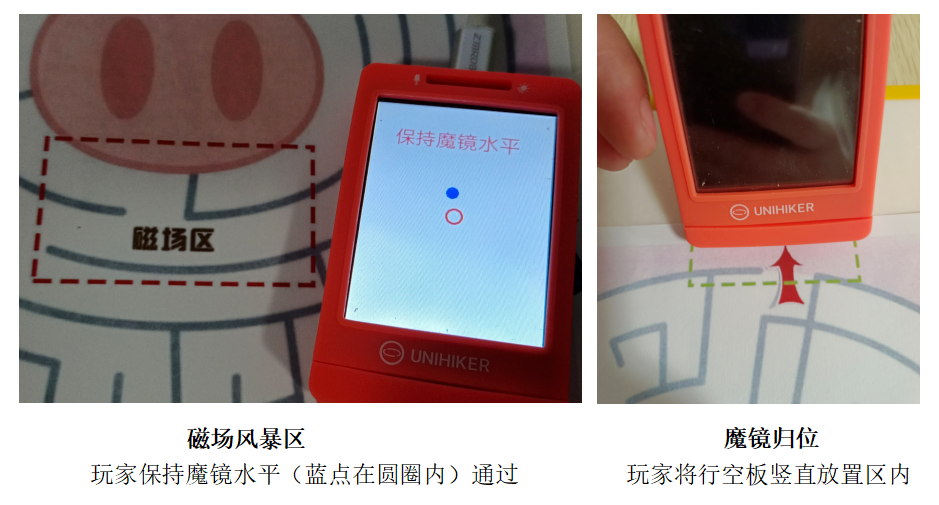
磁场风暴区是一个充满磁场风暴的危险区域,玩家只有手持“魔镜“,保持水平,稳住重心,才能通过磁场风暴。
魔镜归位区是一个感应区,玩家需要把魔镜(行空板)竖立在归位区中,才能彻底激发魔镜的力量,解救小猪。
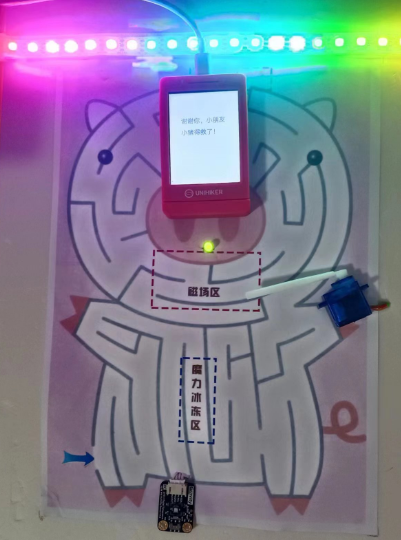
可视化面板介绍
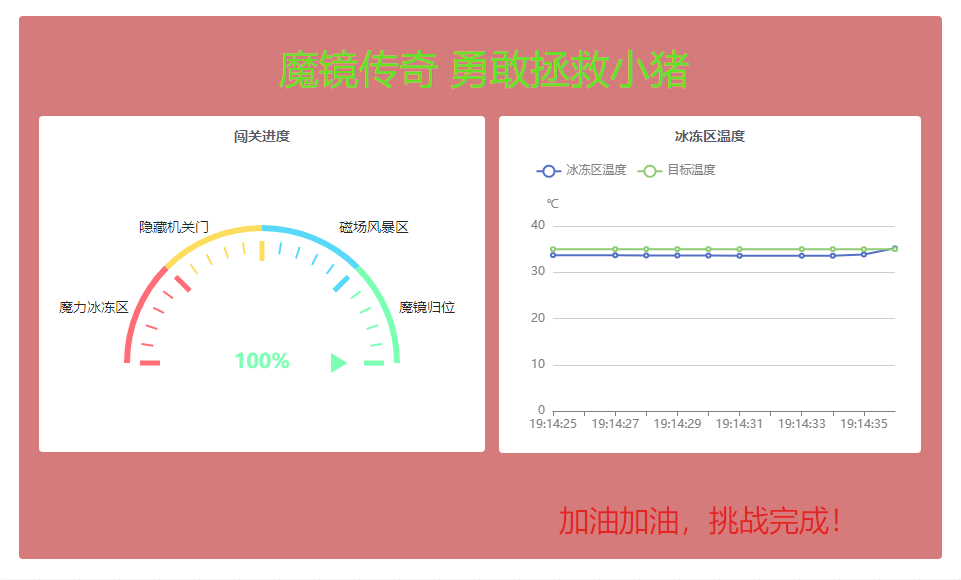
可视化面板只有两个主要功能:显示游戏进度和显示冰冻区实时温度。游戏进度分为四个部分对应上述四个交互区,每个交互区站25%的进度。
材料清单
- 行空板 X1
- SCI模块 X1
- Romeo开发板 X1
- OBLOQ物联网模块 X1
- 温湿度传感器 X1
- 按键开关 X1
- 180度舵机 X1
二、思路分析
由于只有一块行空板,游戏情境中温度、按键开关、舵机的控制是由Remeo开发板控制的,然后再再过OBLOQ物联网模块把数据发送的SIOT物联网,再传输到行空板。行空板主要用于显示迷宫闯关提示信息,路径指南以及加速度传感器感受平衡,其数据同样传输到SIOT物联网。
三、视频演示
1. 功能解说
2.游戏演示
四、项目反思与不足
1.舵机来回抖动。原因我网上查了下,Obloq物联网模块串口通信和舵机servo都要使用定时器,Obloq物联网模块一直要发送数据到物联网,就会产生PWM信号,导致舵机抖动。解决办法参考:https://blog.csdn.net/wzxxtt62267018/article/details/79785690
2.语音提示不足。魔镜应该显示和播放规则文字提示和阅读声音,这样才更贴切小朋友玩。当前作品是作者自己朗读和引导小朋友玩。这个功能需要解决两个问题:第一、把文字转换成语音,推荐pyttsx3。第二、行空板播放音频(连接USB音箱或者蓝牙音箱,参考教程 小含糊online老师的 https://makelog.dfrobot.com.cn/article-313038.html)
3.关卡未做“到达”检测,只有“完成”检测。比如冰冻区,玩家什么时候到达,不明确。这就直接导致游戏时屏幕显示的提示和进度不匹配,我是事先大概朗读记录所需时间,然后再使用“等待*秒”来实现的。如果后期多增加一些传感器检测“玩家到达”,再播放提示效果更佳。


 他的勋章
他的勋章
2023.12.16
厉害厉害
许培享2023.12.11
不错哟
腿毛利小五郎2023.10.25
666
少东2023.09.04
配音演员和主角的完美配合,太赞了!
9mm2023.08.28
666