 返回首页
返回首页
 回到顶部
回到顶部
全球碳排放中,垃圾处理环节占比超5%,其中可回收物若未被有效分类,将导致资源浪费与额外碳排放(如焚烧塑料产生CO₂、填埋纸张释放甲烷)。传统回收依赖人工分拣,效率低且数据缺失,难以量化环保贡献。
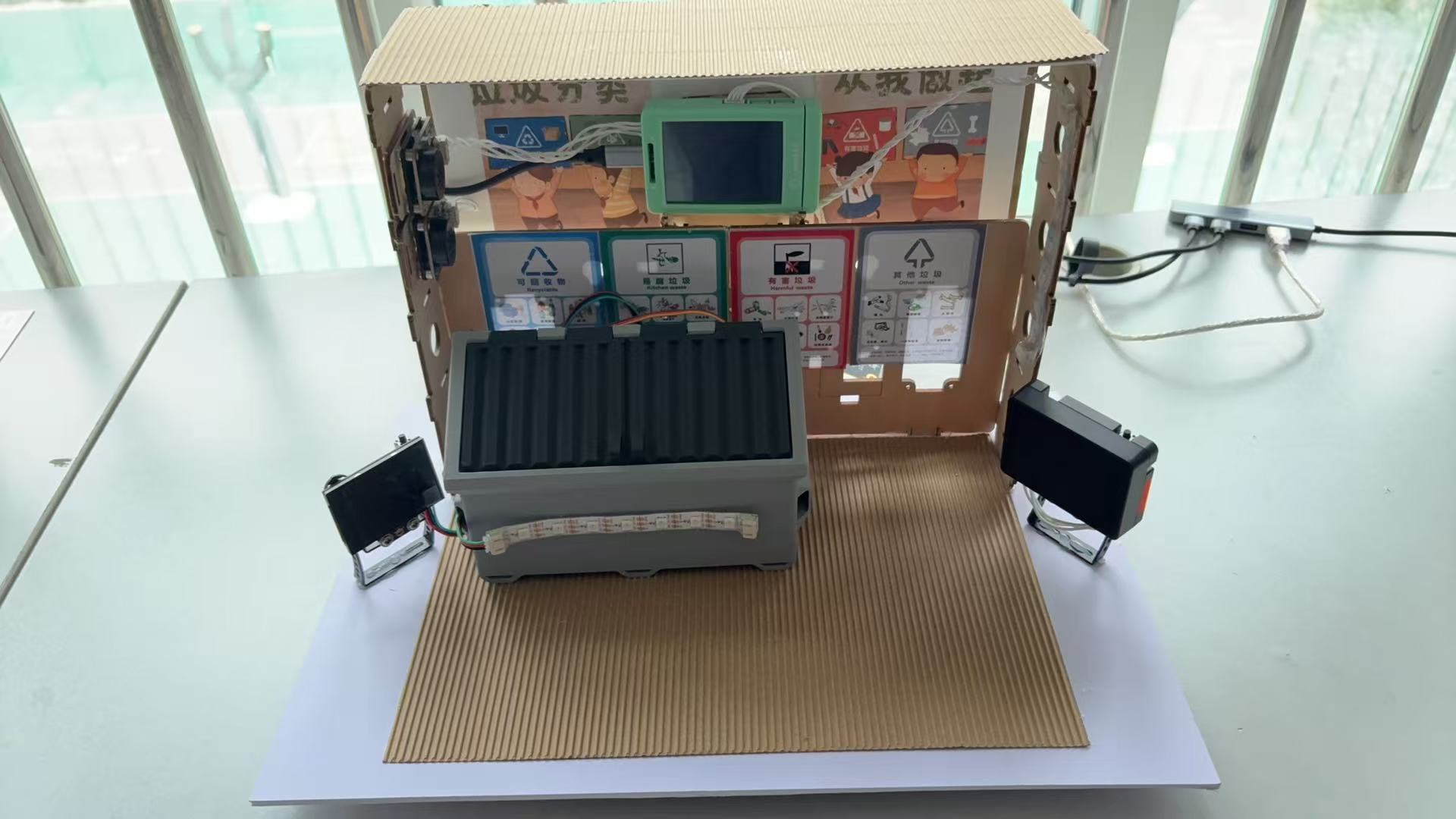
最近用两块开发板(昵称“Arduino”和“行空板”)搭了个智能垃圾分类系统,搭配定制垃圾桶,实现了“精准识别-趣味科普-数据统计”的全流程环保互动。
一、系统架构:分工明确的双机协作模式
- 二哈2(识别核心)
- 功能:基于轻量化AI模型(Mind+公测版),通过物体分类常见的塑料瓶以及易拉罐纸箱等可回收利用资源,通过二哈2实时检测透明瓶、有色瓶、易拉罐三类物品,识别准确率达92%.
- 二代的自学习分类,相比于一代的物体分类的准确率更高,更不容易被颜色不同而进行干扰,并且如识别到已学习的物体,屏幕将以彩色方框框出该物体,并在上方显示“name: IDx 置信度” 还可以在设置中自定义这个物体的名字,并非像一代只能是物体一,物体二这样
- 项目背景,本来计划应用在社区或者其他地方的可回收垃圾资源的分类,目的是解决当前垃圾分类的困境-那就是即使我们严格按照垃圾分类的标准去分类,最后还是被一辆垃圾车混合拉走了由此诞生了一个想法,那就是我们只回收可回收资源,但是这个应用起来有困境,在社区垃圾种类较为混杂的情况下可能效果并不理想,后续可以尝试在学校内,垃圾种类较为单一,且可回收资源多。并且最后可以将这部分垃圾回收的钱捐助给山区或者需要的人
步骤1 整体分成两个部分,二哈一负责检测分类舵机负责开盖,这里的垃圾桶是是从社区找的模型,二哈二负责检测垃圾类型,根据不同的垃圾类型,播放回收的漫画
步骤2 链接硬件
硬件的连接要注意,二哈一可以直接连接在I2C接口上,但是二哈二需要额外的一块转接板,直接连接一个I2C接口可能会由于供电不稳定频繁重启

图片来源:https://wiki.dfrobot.com.cn/_SKU_SEN0638_Gravity_HUSKYLENS_2_AI_Camera_Vision_Sensor
大家可以参考文档
然后就是结构件搭建了,我的这个结构比较简单,外框是用青科赛比赛现场孩子带回来的搭建木制结构件改造的(不是因为懒,主要是体现可回收哈哈哈)
垃圾桶模型是在拓竹社区找的,控制打开就很简单了,舵机上粘了小木柴


接下来就是程序了
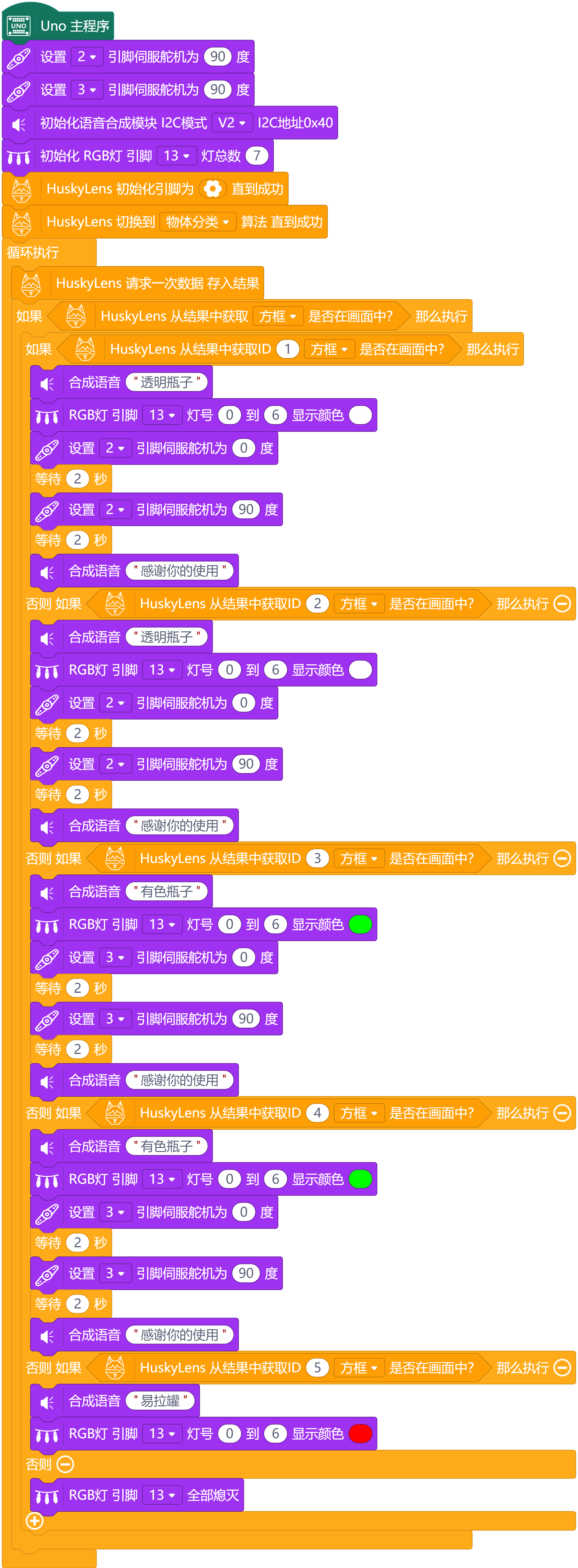
控制垃圾桶打开这里用到的是多重分支
二哈二控制行空板展示图片
材料清单
- Arduino uno X1
- 180°舵机 X2
- 语音合成 X2
- 灯带 X2
- 行空板M10 X1
- 二哈1 X1
- 二哈2 X1
附件
写在最后,可能是公测版的原因,2.0在使用UNO的时候建议加上像1.8一样的一件安装驱动,或者可能是有,但是我没在页面找到。一件安装驱动对于刚开始的新手还是比较重要的。最后希望Mind+2.0越来越好。期待2026的mind+


 他的勋章
他的勋章

评论