 返回首页
返回首页
 回到顶部
回到顶部

10.1
国庆快乐
【学习目标】
在这个帖子中,记录用K10小智的GPIO口控制舵机的学习笔记。
学习@闪电蘑菇老师小智语音自由控制舵机参考教程:

【【小智AI】MCP神技解锁!语音自由控制舵机任意角度✨ (附源码解析)】 https://www.bilibili.com/video/BV1ng8gzHEuP/?share_source=copy_web&vd_source=bf02494b705eb3767ac801cc064e1021
详细的代码原理讲解在上面的视频链接中。
@闪电蘑菇老师开源的教程资料:
## 增加舵机小智AI为1.8.1版本源码地址
github: https://github.com/shenjingnan/xiaozhi-esp32/tree/main/main/boards/bread-compact-wifi-with-servo
gitee: https://gitee.com/shenjingnan/xiaozhi-esp32/tree/feature/board-sg90/main/boards/bread-compact-wifi-with-servo
下面记录的内容,是我尝试把@闪电蘑菇老师的代码从面包板小智迁移到行空板K10小智上并进行测试的过程。
测试视频:
材料清单
- 行空板K10 X1
- DF MG90舵机 X1
步骤1 学习@闪电蘑菇 老师视频,了解小智源码MCP控制GPIO口工作原理
老师在视频中有详细的讲解,并且附有流程图,可以通过在线编辑器查看。
(因为我并没有搞明白控制逻辑,所以下面文字主要由DeepSeek总结)
参与舵机控制的重要文件有四个:
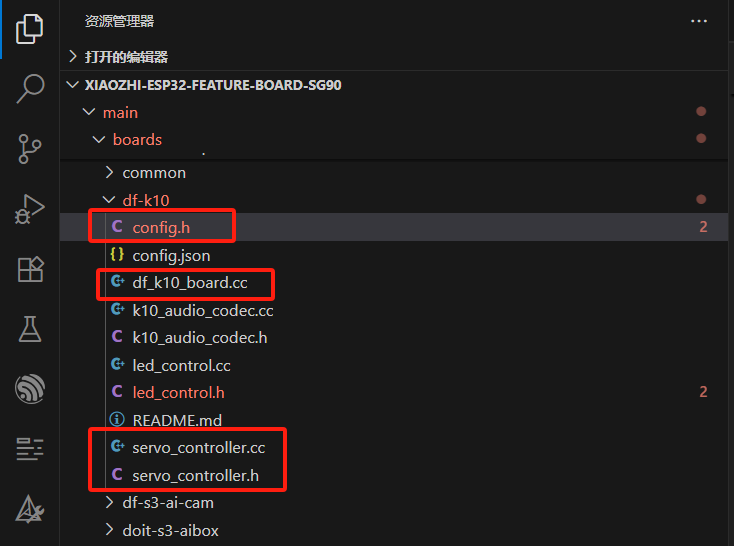
1. config.h - 硬件配置定义
作用:集中管理所有硬件引脚和参数配置
关键配置:
// 舵机控制引脚
#define SERVO_GPIO GPIO_NUM_1
// 舵机运动参数
#define SERVO_MIN_DEGREE 0 // 最小角度
#define SERVO_MAX_DEGREE 180 // 最大角度
#define SERVO_DEFAULT_ANGLE 90 // 默认中心位置
#define SERVO_MIN_PULSEWIDTH_US 500 // 最小脉宽(0度)
#define SERVO_MAX_PULSEWIDTH_US 2500 // 最大脉宽(180度)
2. servo_controller.h - 舵机控制类声明
作用:定义舵机控制器的接口和数据结构
核心功能:
舵机初始化和配置
角度控制(绝对/相对)
扫描模式
运动状态管理
任务队列处理
关键设计模式:
命令模式:通过队列异步处理控制命令
回调机制:运动完成事件通知
资源管理:自动管理PWM通道和任务
3. servo_controller.cc - 舵机控制实现
作用:实现具体的舵机控制逻辑
核心算法:
PWM信号计算:
// 角度转PWM占空比
0° → 0.5ms脉冲 → 2.5%占空比
90° → 1.5ms脉冲 → 7.5%占空比
180° → 2.5ms脉冲 → 12.5%占空比
平滑运动算法:
void SmoothMoveTo(int target_angle, int speed_ms) {
// 将运动分解为多个小步
// 每步之间延时实现平滑移动
// 支持急停功能
}
任务处理流程:
主线程发送命令到队列
ServoTask从队列取出命令
根据命令类型执行相应动作
更新状态并触发回调
4. df_k10_board.cc - 系统集成层
作用:集成所有硬件组件,提供统一接口
初始化流程:
1. InitializeI2c() // I2C总线
2. InitializeIoExpander() // IO扩展器
3. InitializeSpi() // SPI总线
4. InitializeDisplay() // 显示屏
5. InitializeButtons() // 按钮
6. InitializeServoController() // 舵机 ← 关键步骤!
7. InitializeIot() // IoT功能
8. InitializeCamera() // 摄像头
MCP工具集成:
将舵机控制功能暴露为AI可调用的工具
支持角度设置、旋转、扫描、状态查询等操作
控制流程详解
硬件控制流程
应用程序 → ServoController → LEDC PWM → GPIO引脚 → SG90舵机
软件架构流程
MCP命令 → 命令队列 → ServoTask任务 → 角度计算 → PWM输出
关键参数说明
PWM频率:50Hz(20ms周期)
PWM分辨率:14位(16383级)
角度范围:0-180度
脉宽范围:500-2500微秒
平滑移动:避免舵机抖动,延长寿命
使用示例
基本控制
ServoController servo(SERVO_GPIO);
servo.Initialize();
servo.SetAngle(90); // 设置到中心位置
servo.RotateClockwise(45); // 顺时针旋转45度
MCP远程控制
通过AI调用以下工具:
self.servo.set_angle - 设置绝对角度
self.servo.rotate_clockwise - 顺时针旋转
self.servo.rotate_counterclockwise - 逆时针旋转
self.servo.sweep - 自动扫描模式
self.servo.get_position - 获取当前位置
步骤2 汇报行空板K10小智AI的源码文件
1、修改config.h文件 - 舵机配置
作用:集中管理所有硬件引脚和参数配置
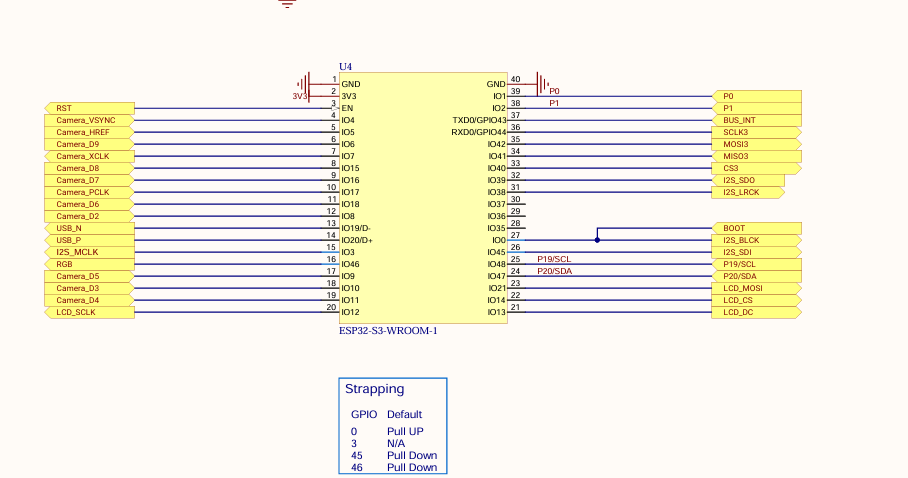
由上图可知,行空板的P0、P1引脚对应ESP32 S3 GPIO1、2。
在本帖子中,舵机接在P0--GPIO1。
这个文件中,增加如下代码:
#ifndef _BOARD_CONFIG_H_
#define _BOARD_CONFIG_H_
#include <driver/gpio.h>
#define AUDIO_INPUT_SAMPLE_RATE 24000
#define AUDIO_OUTPUT_SAMPLE_RATE 24000
#define AUDIO_INPUT_REFERENCE true
#define AUDIO_I2S_GPIO_MCLK GPIO_NUM_3
#define AUDIO_I2S_GPIO_WS GPIO_NUM_38
#define AUDIO_I2S_GPIO_BCLK GPIO_NUM_0
#define AUDIO_I2S_GPIO_DIN GPIO_NUM_39
#define AUDIO_I2S_GPIO_DOUT GPIO_NUM_45
#define AUDIO_CODEC_PA_PIN GPIO_NUM_NC
#define AUDIO_CODEC_I2C_SDA_PIN GPIO_NUM_47
#define AUDIO_CODEC_I2C_SCL_PIN GPIO_NUM_48
#define AUDIO_CODEC_ES8311_ADDR ES8311_CODEC_DEFAULT_ADDR
#define AUDIO_CODEC_ES7210_ADDR 0x23
#define BUILTIN_LED_GPIO GPIO_NUM_46
#define BOOT_BUTTON_GPIO GPIO_NUM_0
#define VOLUME_UP_BUTTON_GPIO GPIO_NUM_NC
#define VOLUME_DOWN_BUTTON_GPIO GPIO_NUM_NC
/* Expander */
#define DRV_IO_EXP_INPUT_MASK (IO_EXPANDER_PIN_NUM_2 | IO_EXPANDER_PIN_NUM_12)
#define DISPLAY_WIDTH 240
#define DISPLAY_HEIGHT 320
#define DISPLAY_MIRROR_X false
#define DISPLAY_MIRROR_Y true
#define DISPLAY_SWAP_XY false
#define DISPLAY_OFFSET_X 0
#define DISPLAY_OFFSET_Y 0
#define DISPLAY_BACKLIGHT_PIN GPIO_NUM_NC
#define DISPLAY_BACKLIGHT_OUTPUT_INVERT false
/* DFRobot K10 Camera pins */
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 7
#define VSYNC_GPIO_NUM 4
#define HREF_GPIO_NUM 5
#define PCLK_GPIO_NUM 17
#define SIOD_GPIO_NUM 20
#define SIOC_GPIO_NUM 19
/* Camera pins */
#define CAMERA_PIN_PWDN PWDN_GPIO_NUM
#define CAMERA_PIN_RESET RESET_GPIO_NUM
#define CAMERA_PIN_XCLK XCLK_GPIO_NUM
#define CAMERA_PIN_SIOD SIOD_GPIO_NUM
#define CAMERA_PIN_SIOC SIOC_GPIO_NUM
#define CAMERA_PIN_D9 6
#define CAMERA_PIN_D8 15
#define CAMERA_PIN_D7 16
#define CAMERA_PIN_D6 18
#define CAMERA_PIN_D5 9
#define CAMERA_PIN_D4 11
#define CAMERA_PIN_D3 10
#define CAMERA_PIN_D2 8
#define CAMERA_PIN_VSYNC VSYNC_GPIO_NUM
#define CAMERA_PIN_HREF HREF_GPIO_NUM
#define CAMERA_PIN_PCLK PCLK_GPIO_NUM
#define XCLK_FREQ_HZ 20000000
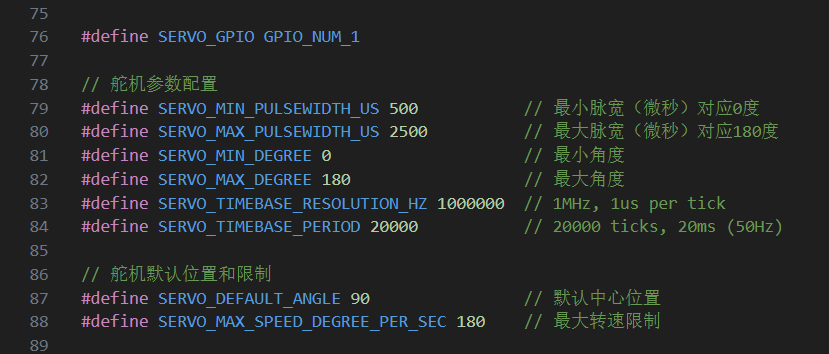
#define SERVO_GPIO GPIO_NUM_1
// 舵机参数配置
#define SERVO_MIN_PULSEWIDTH_US 500 // 最小脉宽(微秒)对应0度
#define SERVO_MAX_PULSEWIDTH_US 2500 // 最大脉宽(微秒)对应180度
#define SERVO_MIN_DEGREE 0 // 最小角度
#define SERVO_MAX_DEGREE 180 // 最大角度
#define SERVO_TIMEBASE_RESOLUTION_HZ 1000000 // 1MHz, 1us per tick
#define SERVO_TIMEBASE_PERIOD 20000 // 20000 ticks, 20ms (50Hz)
// 舵机默认位置和限制
#define SERVO_DEFAULT_ANGLE 90 // 默认中心位置
#define SERVO_MAX_SPEED_DEGREE_PER_SEC 180 // 最大转速限制
#endif // _BOARD_CONFIG_H_
2、servo_controller.h - 舵机控制类声明
作用:定义舵机控制器的接口和数据结构
这个文件从@闪电蘑菇老师代码直接复制过来,没有修改,保留原有角度控制(绝对/相对)、扫描模式等全部控制功能。
#ifndef __SERVO_CONTROLLER_H__
#define __SERVO_CONTROLLER_H__
#include <driver/ledc.h>
#include <driver/gpio.h>
#include <esp_log.h>
#include <freertos/FreeRTOS.h>
#include <freertos/task.h>
#include <freertos/queue.h>
#include <functional>
#include "config.h"
#include "mcp_server.h"
class ServoController {
public:
ServoController(gpio_num_t servo_pin);
~ServoController();
// 基本控制方法
bool Initialize();
void InitializeTools(); // 初始化MCP工具
void SetAngle(int angle);
int GetCurrentAngle() const { return current_angle_; }
// 运动控制方法
void RotateClockwise(int degrees);
void RotateCounterclockwise(int degrees);
void SweepBetween(int min_angle, int max_angle, int speed_ms = 1000);
void Stop();
void Reset(); // 回到中心位置(90度)
// 状态查询
bool IsMoving() const { return is_moving_; }
bool IsSweeping() const { return is_sweeping_; }
// 设置回调函数(当运动完成时调用)
void SetOnMoveCompleteCallback(std::function<void()> callback) {
on_move_complete_callback_ = callback;
}
private:
// 硬件相关
gpio_num_t servo_pin_;
ledc_channel_t ledc_channel_;
ledc_timer_t ledc_timer_;
// 状态变量
int current_angle_;
int target_angle_;
bool is_moving_;
bool is_sweeping_;
bool stop_requested_;
// 任务和队列
TaskHandle_t servo_task_handle_;
QueueHandle_t command_queue_;
// 回调函数
std::function<void()> on_move_complete_callback_;
// 命令类型
enum CommandType {
CMD_SET_ANGLE,
CMD_ROTATE_CW,
CMD_ROTATE_CCW,
CMD_SWEEP,
CMD_STOP,
CMD_RESET
};
// 命令结构
struct ServoCommand {
CommandType type;
int param1; // 角度或度数
int param2; // 最大角度(用于扫描)或速度
int param3; // 速度参数
};
// 私有方法
void WriteAngle(int angle);
uint32_t AngleToCompare(int angle);
bool IsValidAngle(int angle) const;
int ConstrainAngle(int angle) const;
// 任务函数
static void ServoTask(void* parameter);
void ProcessCommands();
void ExecuteSetAngle(int angle);
void ExecuteRotate(int degrees, bool clockwise);
void ExecuteSweep(int min_angle, int max_angle, int speed_ms);
void SmoothMoveTo(int target_angle, int speed_ms = 500);
};
#endif // __SERVO_CONTROLLER_H__
3. servo_controller.cc - 舵机控制实现
作用:实现具体的舵机控制逻辑
这个文件从@闪电蘑菇老师代码直接复制过来,没有修改。
#include "servo_controller.h"
#include <esp_log.h>
#include <cmath>
#define TAG "ServoController"
ServoController::ServoController(gpio_num_t servo_pin)
: servo_pin_(servo_pin)
, ledc_channel_(LEDC_CHANNEL_0)
, ledc_timer_(LEDC_TIMER_0)
, current_angle_(SERVO_DEFAULT_ANGLE)
, target_angle_(SERVO_DEFAULT_ANGLE)
, is_moving_(false)
, is_sweeping_(false)
, stop_requested_(false)
, servo_task_handle_(nullptr)
, command_queue_(nullptr)
, on_move_complete_callback_(nullptr) {
}
ServoController::~ServoController() {
Stop();
if (servo_task_handle_ != nullptr) {
vTaskDelete(servo_task_handle_);
}
if (command_queue_ != nullptr) {
vQueueDelete(command_queue_);
}
}
bool ServoController::Initialize() {
ESP_LOGI(TAG, "初始化SG90舵机控制器,引脚: %d", servo_pin_);
// 配置LEDC定时器 (ESP32-S3最大支持14位分辨率)
ledc_timer_config_t timer_config = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.duty_resolution = LEDC_TIMER_14_BIT,
.timer_num = ledc_timer_,
.freq_hz = 50, // 50Hz for servo
.clk_cfg = LEDC_AUTO_CLK
};
esp_err_t ret = ledc_timer_config(&timer_config);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "LEDC定时器配置失败: %s", esp_err_to_name(ret));
return false;
}
// 配置LEDC通道
ledc_channel_config_t channel_config = {
.gpio_num = servo_pin_,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = ledc_channel_,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = ledc_timer_,
.duty = 0,
.hpoint = 0
};
ret = ledc_channel_config(&channel_config);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "LEDC通道配置失败: %s", esp_err_to_name(ret));
return false;
}
// 创建命令队列
command_queue_ = xQueueCreate(10, sizeof(ServoCommand));
if (command_queue_ == nullptr) {
ESP_LOGE(TAG, "创建命令队列失败");
return false;
}
// 创建舵机控制任务
BaseType_t task_ret = xTaskCreate(
ServoTask,
"servo_task",
4096,
this,
5,
&servo_task_handle_
);
if (task_ret != pdPASS) {
ESP_LOGE(TAG, "创建舵机任务失败");
return false;
}
// 设置初始位置
WriteAngle(current_angle_);
ESP_LOGI(TAG, "SG90舵机控制器初始化成功");
return true;
}
void ServoController::InitializeTools() {
auto& mcp_server = McpServer::GetInstance();
ESP_LOGI(TAG, "开始注册舵机MCP工具...");
// 设置舵机角度
mcp_server.AddTool("self.servo.set_angle",
"设置SG90舵机到指定角度。angle: 目标角度(0-180度)",
PropertyList({Property("angle", kPropertyTypeInteger, 90, 0, 180)}),
[this](const PropertyList& properties) -> ReturnValue {
int angle = properties["angle"].value<int>();
SetAngle(angle);
return "舵机设置到 " + std::to_string(angle) + " 度";
});
// 顺时针旋转
mcp_server.AddTool("self.servo.rotate_clockwise",
"顺时针旋转SG90舵机指定角度。degrees: 旋转角度(1-180度)",
PropertyList({Property("degrees", kPropertyTypeInteger, 30, 1, 180)}),
[this](const PropertyList& properties) -> ReturnValue {
int degrees = properties["degrees"].value<int>();
RotateClockwise(degrees);
return "舵机顺时针旋转 " + std::to_string(degrees) + " 度";
});
// 逆时针旋转
mcp_server.AddTool("self.servo.rotate_counterclockwise",
"逆时针旋转SG90舵机指定角度。degrees: 旋转角度(1-180度)",
PropertyList({Property("degrees", kPropertyTypeInteger, 30, 1, 180)}),
[this](const PropertyList& properties) -> ReturnValue {
int degrees = properties["degrees"].value<int>();
RotateCounterclockwise(degrees);
return "舵机逆时针旋转 " + std::to_string(degrees) + " 度";
});
// 获取当前位置
mcp_server.AddTool("self.servo.get_position",
"获取SG90舵机当前角度位置",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
int angle = GetCurrentAngle();
return "当前舵机角度: " + std::to_string(angle) + " 度";
});
// 扫描模式
mcp_server.AddTool("self.servo.sweep",
"SG90舵机扫描模式,在指定角度范围内来回摆动。"
"min_angle: 最小角度(0-179度); max_angle: 最大角度(1-180度); "
"speed: 摆动速度,毫秒(100-5000ms)",
PropertyList({Property("min_angle", kPropertyTypeInteger, 0, 0, 179),
Property("max_angle", kPropertyTypeInteger, 180, 1, 180),
Property("speed", kPropertyTypeInteger, 1000, 100, 5000)}),
[this](const PropertyList& properties) -> ReturnValue {
int min_angle = properties["min_angle"].value<int>();
int max_angle = properties["max_angle"].value<int>();
int speed = properties["speed"].value<int>();
SweepBetween(min_angle, max_angle, speed);
return "开始扫描模式: " + std::to_string(min_angle) + "° - " +
std::to_string(max_angle) + "°";
});
// 停止舵机
mcp_server.AddTool("self.servo.stop",
"立即停止SG90舵机运动",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Stop();
return "舵机已停止";
});
// 复位到中心位置
mcp_server.AddTool("self.servo.reset",
"将SG90舵机复位到中心位置(90度)",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Reset();
return "舵机已复位到中心位置(90度)";
});
// 获取舵机状态
mcp_server.AddTool("self.servo.get_status",
"获取SG90舵机当前状态",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
int angle = GetCurrentAngle();
bool moving = IsMoving();
bool sweeping = IsSweeping();
std::string status = "{\"angle\":" + std::to_string(angle) +
",\"moving\":" + (moving ? "true" : "false") +
",\"sweeping\":" + (sweeping ? "true" : "false") + "}";
return status;
});
ESP_LOGI(TAG, "舵机MCP工具注册完成");
}
void ServoController::SetAngle(int angle) {
if (!IsValidAngle(angle)) {
ESP_LOGW(TAG, "无效角度: %d,将限制在有效范围内", angle);
angle = ConstrainAngle(angle);
}
ServoCommand cmd = {CMD_SET_ANGLE, angle, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::RotateClockwise(int degrees) {
if (degrees <= 0) {
ESP_LOGW(TAG, "旋转角度必须大于0");
return;
}
ServoCommand cmd = {CMD_ROTATE_CW, degrees, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::RotateCounterclockwise(int degrees) {
if (degrees <= 0) {
ESP_LOGW(TAG, "旋转角度必须大于0");
return;
}
ServoCommand cmd = {CMD_ROTATE_CCW, degrees, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::SweepBetween(int min_angle, int max_angle, int speed_ms) {
if (!IsValidAngle(min_angle) || !IsValidAngle(max_angle)) {
ESP_LOGW(TAG, "扫描角度范围无效: %d - %d", min_angle, max_angle);
return;
}
if (min_angle >= max_angle) {
ESP_LOGW(TAG, "最小角度必须小于最大角度");
return;
}
ServoCommand cmd = {CMD_SWEEP, min_angle, max_angle, speed_ms};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::Stop() {
stop_requested_ = true;
ServoCommand cmd = {CMD_STOP, 0, 0, 0};
xQueueSend(command_queue_, &cmd, 0); // 不等待,立即发送停止命令
}
void ServoController::Reset() {
ServoCommand cmd = {CMD_RESET, SERVO_DEFAULT_ANGLE, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::WriteAngle(int angle) {
angle = ConstrainAngle(angle);
uint32_t compare_value = AngleToCompare(angle);
ledc_set_duty(LEDC_LOW_SPEED_MODE, ledc_channel_, compare_value);
ledc_update_duty(LEDC_LOW_SPEED_MODE, ledc_channel_);
current_angle_ = angle;
}
uint32_t ServoController::AngleToCompare(int angle) {
// 将角度转换为PWM占空比
// SG90: 0.5ms-2.5ms 对应 0-180度
// 50Hz周期 = 20ms
// 占空比 = (脉宽 / 周期) * 2^14 (ESP32-S3使用14位分辨率)
float pulse_width_ms = 0.5f + (angle / 180.0f) * 2.0f; // 0.5ms to 2.5ms
float duty_cycle = pulse_width_ms / 20.0f; // 20ms period
uint32_t compare_value = (uint32_t)(duty_cycle * 16383); // 14-bit resolution (2^14 - 1)
return compare_value;
}
bool ServoController::IsValidAngle(int angle) const {
return angle >= SERVO_MIN_DEGREE && angle <= SERVO_MAX_DEGREE;
}
int ServoController::ConstrainAngle(int angle) const {
if (angle < SERVO_MIN_DEGREE) return SERVO_MIN_DEGREE;
if (angle > SERVO_MAX_DEGREE) return SERVO_MAX_DEGREE;
return angle;
}
void ServoController::ServoTask(void* parameter) {
ServoController* controller = static_cast<ServoController*>(parameter);
controller->ProcessCommands();
}
void ServoController::ProcessCommands() {
ServoCommand cmd;
while (true) {
if (xQueueReceive(command_queue_, &cmd, pdMS_TO_TICKS(100)) == pdTRUE) {
if (stop_requested_ && cmd.type != CMD_STOP) {
continue; // 忽略非停止命令
}
switch (cmd.type) {
case CMD_SET_ANGLE:
ExecuteSetAngle(cmd.param1);
break;
case CMD_ROTATE_CW:
ExecuteRotate(cmd.param1, true);
break;
case CMD_ROTATE_CCW:
ExecuteRotate(cmd.param1, false);
break;
case CMD_SWEEP:
ExecuteSweep(cmd.param1, cmd.param2, cmd.param3);
break;
case CMD_STOP:
is_moving_ = false;
is_sweeping_ = false;
stop_requested_ = false;
ESP_LOGI(TAG, "舵机停止");
break;
case CMD_RESET:
ExecuteSetAngle(cmd.param1);
break;
}
}
}
}
void ServoController::ExecuteSetAngle(int angle) {
ESP_LOGI(TAG, "设置舵机角度: %d度", angle);
is_moving_ = true;
SmoothMoveTo(angle, 500);
is_moving_ = false;
if (on_move_complete_callback_) {
on_move_complete_callback_();
}
}
void ServoController::ExecuteRotate(int degrees, bool clockwise) {
int target = current_angle_ + (clockwise ? degrees : -degrees);
target = ConstrainAngle(target);
ESP_LOGI(TAG, "%s旋转 %d度,从 %d度 到 %d度",
clockwise ? "顺时针" : "逆时针", degrees, current_angle_, target);
is_moving_ = true;
SmoothMoveTo(target, 500);
is_moving_ = false;
if (on_move_complete_callback_) {
on_move_complete_callback_();
}
}
void ServoController::ExecuteSweep(int min_angle, int max_angle, int speed_ms) {
ESP_LOGI(TAG, "开始扫描模式: %d度 - %d度,速度: %dms", min_angle, max_angle, speed_ms);
is_sweeping_ = true;
is_moving_ = true;
bool direction = true; // true = 向最大角度,false = 向最小角度
while (is_sweeping_ && !stop_requested_) {
int target = direction ? max_angle : min_angle;
SmoothMoveTo(target, speed_ms);
if (stop_requested_) break;
direction = !direction;
vTaskDelay(pdMS_TO_TICKS(100)); // 短暂停顿
}
is_sweeping_ = false;
is_moving_ = false;
ESP_LOGI(TAG, "扫描模式结束");
if (on_move_complete_callback_) {
on_move_complete_callback_();
}
}
void ServoController::SmoothMoveTo(int target_angle, int speed_ms) {
target_angle = ConstrainAngle(target_angle);
if (target_angle == current_angle_) {
return; // 已经在目标位置
}
int start_angle = current_angle_;
int angle_diff = target_angle - start_angle;
int steps = abs(angle_diff);
if (steps == 0) return;
int delay_per_step = speed_ms / steps;
if (delay_per_step < 10) delay_per_step = 10; // 最小延迟
for (int i = 1; i <= steps && !stop_requested_; i++) {
int current_step_angle = start_angle + (angle_diff * i) / steps;
WriteAngle(current_step_angle);
vTaskDelay(pdMS_TO_TICKS(delay_per_step));
}
// 确保到达精确位置
if (!stop_requested_) {
WriteAngle(target_angle);
}
}
4、修改df_k10_board.cc代码
集成所有硬件(包括舵机)组件,提供统一接口
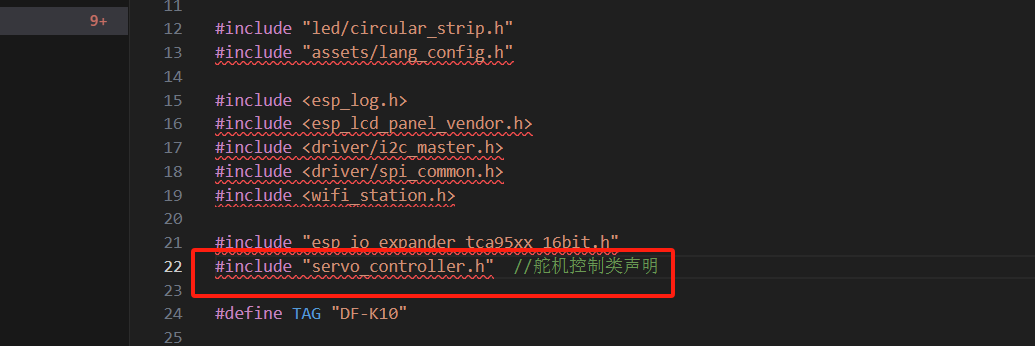
文件开头添加导入控制文件
舵机控制器成员变量声明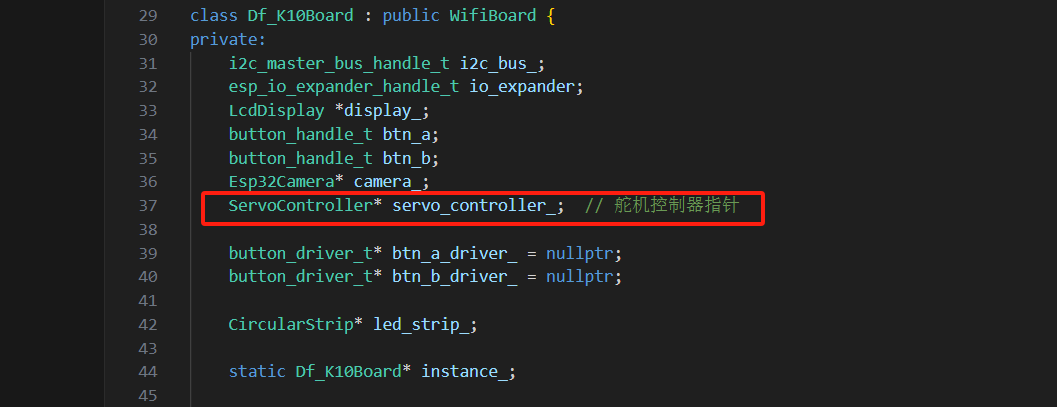
作用:
声明舵机控制器的对象指针
作为Df_K10Board类的成员,管理舵机控制器的生命周期
舵机初始化函数
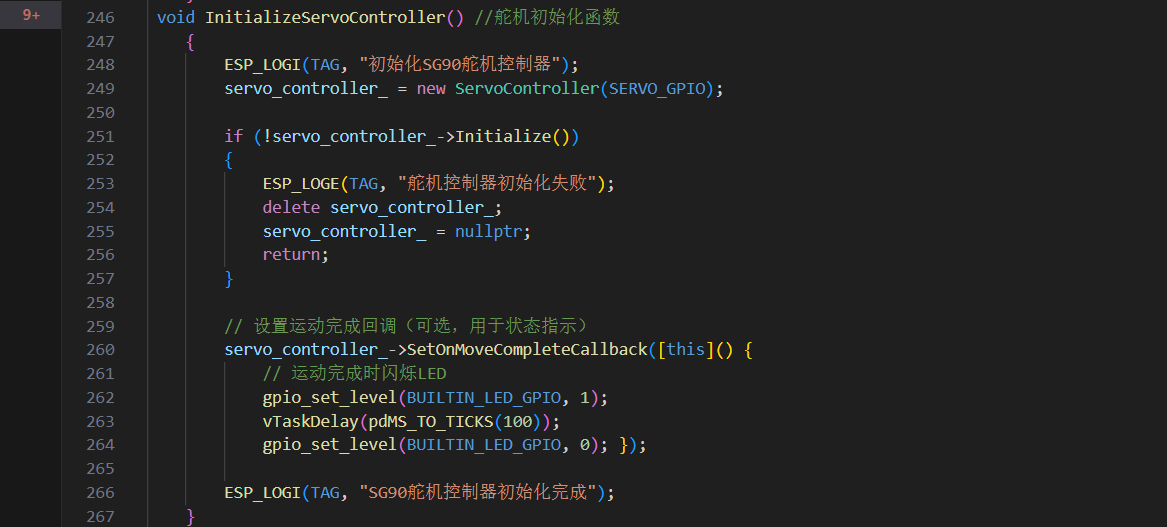
作用:
创建对象:实例化ServoController类
硬件初始化:调用Initialize()配置PWM硬件
错误处理:初始化失败时清理资源
回调设置:注册运动完成时的LED指示
状态日志:输出初始化状态信息
IoT功能初始化中的舵机注册
作用:
工具注册:将舵机控制功能注册为MCP工具
AI集成:使AI能够通过工具调用控制舵机
条件检查:确保舵机控制器已成功初始化
构造函数中的初始化调用
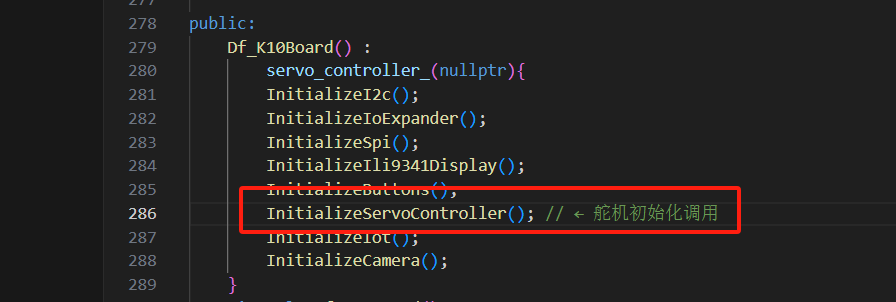
作用:
初始化顺序:在系统启动流程中调用舵机初始化
资源管理:确保在IoT注册前完成舵机初始化
依赖关系:正确的硬件初始化顺序
析构函数中的资源清理

作用:
内存管理:防止内存泄漏
资源释放:清理PWM硬件资源
安全关闭:确保系统退出时舵机停止
#include "wifi_board.h"
#include "k10_audio_codec.h"
#include "display/lcd_display.h"
#include "esp_lcd_ili9341.h"
#include "led_control.h"
#include "font_awesome_symbols.h"
#include "application.h"
#include "button.h"
#include "config.h"
#include "esp32_camera.h"
#include "led/circular_strip.h"
#include "assets/lang_config.h"
#include <esp_log.h>
#include <esp_lcd_panel_vendor.h>
#include <driver/i2c_master.h>
#include <driver/spi_common.h>
#include <wifi_station.h>
#include "esp_io_expander_tca95xx_16bit.h"
#include "servo_controller.h" //舵机控制类声明
#define TAG "DF-K10"
LV_FONT_DECLARE(font_puhui_20_4);
LV_FONT_DECLARE(font_awesome_20_4);
class Df_K10Board : public WifiBoard {
private:
i2c_master_bus_handle_t i2c_bus_;
esp_io_expander_handle_t io_expander;
LcdDisplay *display_;
button_handle_t btn_a;
button_handle_t btn_b;
Esp32Camera* camera_;
ServoController* servo_controller_; // 舵机控制器指针
button_driver_t* btn_a_driver_ = nullptr;
button_driver_t* btn_b_driver_ = nullptr;
CircularStrip* led_strip_;
static Df_K10Board* instance_;
void InitializeI2c() {
// Initialize I2C peripheral
i2c_master_bus_config_t i2c_bus_cfg = {
.i2c_port = (i2c_port_t)1,
.sda_io_num = AUDIO_CODEC_I2C_SDA_PIN,
.scl_io_num = AUDIO_CODEC_I2C_SCL_PIN,
.clk_source = I2C_CLK_SRC_DEFAULT,
.glitch_ignore_cnt = 7,
.intr_priority = 0,
.trans_queue_depth = 0,
.flags = {
.enable_internal_pullup = 1,
},
};
ESP_ERROR_CHECK(i2c_new_master_bus(&i2c_bus_cfg, &i2c_bus_));
}
void InitializeSpi() {
spi_bus_config_t buscfg = {};
buscfg.mosi_io_num = GPIO_NUM_21;
buscfg.miso_io_num = GPIO_NUM_NC;
buscfg.sclk_io_num = GPIO_NUM_12;
buscfg.quadwp_io_num = GPIO_NUM_NC;
buscfg.quadhd_io_num = GPIO_NUM_NC;
buscfg.max_transfer_sz = DISPLAY_WIDTH * DISPLAY_HEIGHT * sizeof(uint16_t);
ESP_ERROR_CHECK(spi_bus_initialize(SPI3_HOST, &buscfg, SPI_DMA_CH_AUTO));
}
esp_err_t IoExpanderSetLevel(uint16_t pin_mask, uint8_t level) {
return esp_io_expander_set_level(io_expander, pin_mask, level);
}
uint8_t IoExpanderGetLevel(uint16_t pin_mask) {
uint32_t pin_val = 0;
esp_io_expander_get_level(io_expander, DRV_IO_EXP_INPUT_MASK, &pin_val);
pin_mask &= DRV_IO_EXP_INPUT_MASK;
return (uint8_t)((pin_val & pin_mask) ? 1 : 0);
}
void InitializeIoExpander() {
esp_io_expander_new_i2c_tca95xx_16bit(
i2c_bus_, ESP_IO_EXPANDER_I2C_TCA9555_ADDRESS_000, &io_expander);
esp_err_t ret;
ret = esp_io_expander_print_state(io_expander);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Print state failed: %s", esp_err_to_name(ret));
}
ret = esp_io_expander_set_dir(io_expander, IO_EXPANDER_PIN_NUM_0,
IO_EXPANDER_OUTPUT);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Set direction failed: %s", esp_err_to_name(ret));
}
ret = esp_io_expander_set_level(io_expander, 0, 1);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Set level failed: %s", esp_err_to_name(ret));
}
ret = esp_io_expander_set_dir(
io_expander, DRV_IO_EXP_INPUT_MASK,
IO_EXPANDER_INPUT);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Set direction failed: %s", esp_err_to_name(ret));
}
}
void InitializeButtons() {
instance_ = this;
// Button A
button_config_t btn_a_config = {
.long_press_time = 1000,
.short_press_time = 0
};
btn_a_driver_ = (button_driver_t*)calloc(1, sizeof(button_driver_t));
btn_a_driver_->enable_power_save = false;
btn_a_driver_->get_key_level = [](button_driver_t *button_driver) -> uint8_t {
return !instance_->IoExpanderGetLevel(IO_EXPANDER_PIN_NUM_2);
};
ESP_ERROR_CHECK(iot_button_create(&btn_a_config, btn_a_driver_, &btn_a));
iot_button_register_cb(btn_a, BUTTON_SINGLE_CLICK, nullptr, [](void* button_handle, void* usr_data) {
auto self = static_cast<Df_K10Board*>(usr_data);
auto& app = Application::GetInstance();
if (app.GetDeviceState() == kDeviceStateStarting && !WifiStation::GetInstance().IsConnected()) {
self->ResetWifiConfiguration();
}
app.ToggleChatState();
}, this);
iot_button_register_cb(btn_a, BUTTON_LONG_PRESS_START, nullptr, [](void* button_handle, void* usr_data) {
auto self = static_cast<Df_K10Board*>(usr_data);
auto codec = self->GetAudioCodec();
auto volume = codec->output_volume() - 10;
if (volume < 0) {
volume = 0;
}
codec->SetOutputVolume(volume);
self->GetDisplay()->ShowNotification(Lang::Strings::VOLUME + std::to_string(volume));
}, this);
// Button B
button_config_t btn_b_config = {
.long_press_time = 1000,
.short_press_time = 0
};
btn_b_driver_ = (button_driver_t*)calloc(1, sizeof(button_driver_t));
btn_b_driver_->enable_power_save = false;
btn_b_driver_->get_key_level = [](button_driver_t *button_driver) -> uint8_t {
return !instance_->IoExpanderGetLevel(IO_EXPANDER_PIN_NUM_12);
};
ESP_ERROR_CHECK(iot_button_create(&btn_b_config, btn_b_driver_, &btn_b));
iot_button_register_cb(btn_b, BUTTON_SINGLE_CLICK, nullptr, [](void* button_handle, void* usr_data) {
auto self = static_cast<Df_K10Board*>(usr_data);
auto& app = Application::GetInstance();
if (app.GetDeviceState() == kDeviceStateStarting && !WifiStation::GetInstance().IsConnected()) {
self->ResetWifiConfiguration();
}
app.ToggleChatState();
}, this);
iot_button_register_cb(btn_b, BUTTON_LONG_PRESS_START, nullptr, [](void* button_handle, void* usr_data) {
auto self = static_cast<Df_K10Board*>(usr_data);
auto codec = self->GetAudioCodec();
auto volume = codec->output_volume() + 10;
if (volume > 100) {
volume = 100;
}
codec->SetOutputVolume(volume);
self->GetDisplay()->ShowNotification(Lang::Strings::VOLUME + std::to_string(volume));
}, this);
}
void InitializeCamera() {
camera_config_t config = {};
config.ledc_channel = LEDC_CHANNEL_2; // LEDC通道选择 用于生成XCLK时钟 但是S3不用
config.ledc_timer = LEDC_TIMER_2; // LEDC timer选择 用于生成XCLK时钟 但是S3不用
config.pin_d0 = CAMERA_PIN_D2;
config.pin_d1 = CAMERA_PIN_D3;
config.pin_d2 = CAMERA_PIN_D4;
config.pin_d3 = CAMERA_PIN_D5;
config.pin_d4 = CAMERA_PIN_D6;
config.pin_d5 = CAMERA_PIN_D7;
config.pin_d6 = CAMERA_PIN_D8;
config.pin_d7 = CAMERA_PIN_D9;
config.pin_xclk = CAMERA_PIN_XCLK;
config.pin_pclk = CAMERA_PIN_PCLK;
config.pin_vsync = CAMERA_PIN_VSYNC;
config.pin_href = CAMERA_PIN_HREF;
config.pin_sccb_sda = -1; // 这里如果写-1 表示使用已经初始化的I2C接口
config.pin_sccb_scl = CAMERA_PIN_SIOC;
config.sccb_i2c_port = 1; // 这里如果写1 默认使用I2C1
config.pin_pwdn = CAMERA_PIN_PWDN;
config.pin_reset = CAMERA_PIN_RESET;
config.xclk_freq_hz = XCLK_FREQ_HZ;
config.pixel_format = PIXFORMAT_RGB565;
config.frame_size = FRAMESIZE_VGA;
config.jpeg_quality = 12;
config.fb_count = 1;
config.fb_location = CAMERA_FB_IN_PSRAM;
config.grab_mode = CAMERA_GRAB_WHEN_EMPTY;
camera_ = new Esp32Camera(config);
}
void InitializeIli9341Display() {
esp_lcd_panel_io_handle_t panel_io = nullptr;
esp_lcd_panel_handle_t panel = nullptr;
// 液晶屏控制IO初始化
ESP_LOGD(TAG, "Install panel IO");
esp_lcd_panel_io_spi_config_t io_config = {};
io_config.cs_gpio_num = GPIO_NUM_14;
io_config.dc_gpio_num = GPIO_NUM_13;
io_config.spi_mode = 0;
io_config.pclk_hz = 40 * 1000 * 1000;
io_config.trans_queue_depth = 10;
io_config.lcd_cmd_bits = 8;
io_config.lcd_param_bits = 8;
ESP_ERROR_CHECK(esp_lcd_new_panel_io_spi(SPI3_HOST, &io_config, &panel_io));
// 初始化液晶屏驱动芯片
ESP_LOGD(TAG, "Install LCD driver");
esp_lcd_panel_dev_config_t panel_config = {};
panel_config.reset_gpio_num = GPIO_NUM_NC;
panel_config.bits_per_pixel = 16;
panel_config.color_space = ESP_LCD_COLOR_SPACE_BGR;
ESP_ERROR_CHECK(esp_lcd_new_panel_ili9341(panel_io, &panel_config, &panel));
ESP_ERROR_CHECK(esp_lcd_panel_reset(panel));
ESP_ERROR_CHECK(esp_lcd_panel_init(panel));
ESP_ERROR_CHECK(esp_lcd_panel_invert_color(panel, DISPLAY_BACKLIGHT_OUTPUT_INVERT));
ESP_ERROR_CHECK(esp_lcd_panel_swap_xy(panel, DISPLAY_SWAP_XY));
ESP_ERROR_CHECK(esp_lcd_panel_mirror(panel, DISPLAY_MIRROR_X, DISPLAY_MIRROR_Y));
ESP_ERROR_CHECK(esp_lcd_panel_disp_on_off(panel, true));
display_ = new SpiLcdDisplay(panel_io, panel,
DISPLAY_WIDTH, DISPLAY_HEIGHT, DISPLAY_OFFSET_X, DISPLAY_OFFSET_Y, DISPLAY_MIRROR_X, DISPLAY_MIRROR_Y, DISPLAY_SWAP_XY,
{
.text_font = &font_puhui_20_4,
.icon_font = &font_awesome_20_4,
.emoji_font = font_emoji_64_init(),
});
}
void InitializeServoController() //舵机初始化函数
{
ESP_LOGI(TAG, "初始化SG90舵机控制器");
servo_controller_ = new ServoController(SERVO_GPIO);
if (!servo_controller_->Initialize())
{
ESP_LOGE(TAG, "舵机控制器初始化失败");
delete servo_controller_;
servo_controller_ = nullptr;
return;
}
// 设置运动完成回调(可选,用于状态指示)
servo_controller_->SetOnMoveCompleteCallback([this]() {
// 运动完成时闪烁LED
gpio_set_level(BUILTIN_LED_GPIO, 1);
vTaskDelay(pdMS_TO_TICKS(100));
gpio_set_level(BUILTIN_LED_GPIO, 0); });
ESP_LOGI(TAG, "SG90舵机控制器初始化完成");
}
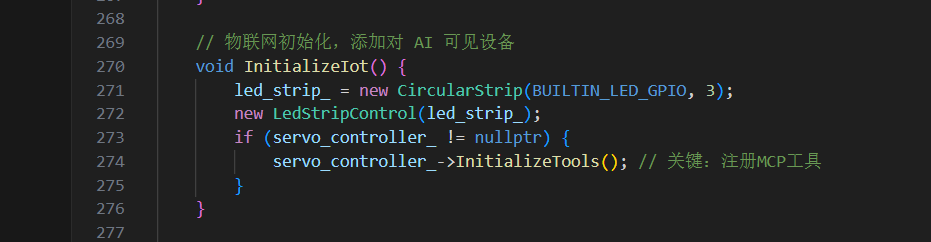
// 物联网初始化,添加对 AI 可见设备
void InitializeIot() {
led_strip_ = new CircularStrip(BUILTIN_LED_GPIO, 3);
new LedStripControl(led_strip_);
if (servo_controller_ != nullptr) {
servo_controller_->InitializeTools(); // 关键:注册MCP工具
}
}
public:
Df_K10Board() :
servo_controller_(nullptr){
InitializeI2c();
InitializeIoExpander();
InitializeSpi();
InitializeIli9341Display();
InitializeButtons();
InitializeServoController(); // ← 舵机初始化调用
InitializeIot();
InitializeCamera();
}
virtual ~Df_K10Board()
{
if (servo_controller_) {
delete servo_controller_;
}
}
virtual Led* GetLed() override {
return led_strip_;
}
virtual AudioCodec *GetAudioCodec() override {
static K10AudioCodec audio_codec(
i2c_bus_,
AUDIO_INPUT_SAMPLE_RATE,
AUDIO_OUTPUT_SAMPLE_RATE,
AUDIO_I2S_GPIO_MCLK,
AUDIO_I2S_GPIO_BCLK,
AUDIO_I2S_GPIO_WS,
AUDIO_I2S_GPIO_DOUT,
AUDIO_I2S_GPIO_DIN,
AUDIO_CODEC_PA_PIN,
AUDIO_CODEC_ES8311_ADDR,
AUDIO_CODEC_ES7210_ADDR,
AUDIO_INPUT_REFERENCE);
return &audio_codec;
}
virtual Camera* GetCamera() override {
return camera_;
}
virtual Display *GetDisplay() override {
return display_;
}
};
DECLARE_BOARD(Df_K10Board);
Df_K10Board* Df_K10Board::instance_ = nullptr;
配置、编译、烧录、测试
【小结】
当前系统的完整功能:
基本控制:设置绝对角度 (0-180°) 相对旋转(顺时针/逆时针)平滑运动控制
高级功能:自动扫描模式 急停控制 位置复位
状态管理:实时角度查询 运动状态监控 完成回调通知
远程控制:通过MCP工具与AI交互 完整的错误处理 详细的日志输出


 他的勋章
他的勋章
罗罗罗2025.12.01
666