 返回首页
返回首页
 回到顶部
回到顶部

步骤1 项目概述
本项目将传统木鱼与现代智能硬件结合,通过行空板K10控制舵机自动敲击木鱼,旋钮实时调节敲击速度,每敲一次功德值增加1。项目融合了物理计算、传感器应用和创意编程,在娱乐中学习编程思维和硬件控制原理。
步骤2 硬件清单

步骤3 系统架构
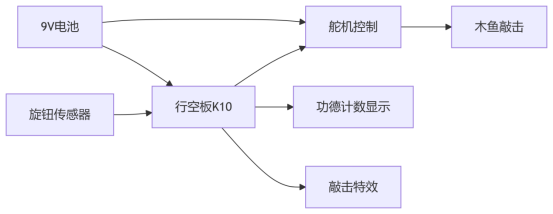
步骤4 功能实现方案
1. 木鱼敲击与功德计数
a.舵机控制:P1引脚输出PWM信号控制舵机角度
b.敲击动作:舵机从10°→60°→10°完成一次敲击
c.功德计数:每次敲击后变量功德值增加1
d.显示更新:功德值实时显示在行空板屏幕上
2. 旋钮控制功能
敲击速度调节:
顺时针旋转:增加敲击频率(0.2次/秒 → 1次/秒)
逆时针旋转:降低敲击频率
3. 敲击特效设计
a.木鱼被敲击时显示金色圆圈切换
b.速度联动特效:敲击速度越快,圆圈切换速度越快
步骤5 程序设计逻辑
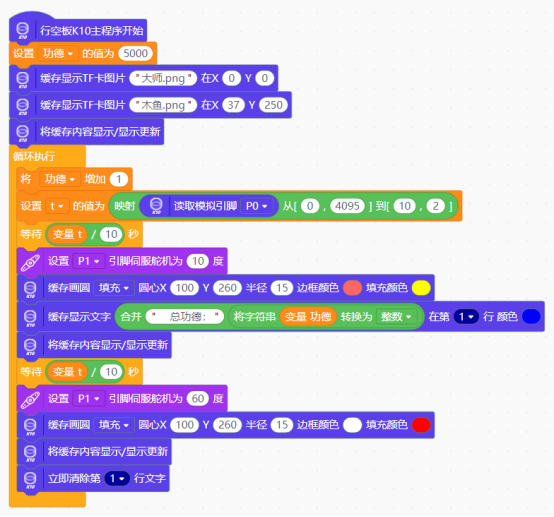
程序说明:
A.时间控制机制
电位器值 → 映射为整数10-2 → 除以10得到0.2-1秒
B.舵机动作序列
设置P1为10° # 抬起木槌(准备状态)
显示计数 # 更新屏幕显示
等待H秒 # H=映射值/10
设置P1为60° # 敲击木鱼(动作状态)
C.显示刷新优化
使用"立即清除第1行文字"而非全屏刷新
避免图片闪烁
红点位置不变(X100,Y260),仅作为动作指示器
步骤6 视频演示
作者公众号



 他的勋章
他的勋章


评论