 返回首页
返回首页
 回到顶部
回到顶部
6.29
【任务设想】
在上一个小作业中,学习了在M10上部署Blynk本地服务器并设为自启动,同时M10还可以做客户端接入搭建在自己系统里Blynk服务器和手机端app实现物联互动。

然后我就想用手机+M10+扩展板组合来做一个遥控的仰望小车。

材料清单
- M10 X1
- 电池扩展板组合 X1
- 乐高电机 X2
- 乐高舵机 X1
- 乐高积木 X
- 手机+Blynk app X
步骤1 在M10上部署Blynk本地自启动服务器
这个任务在昨天已完成。
当然也可以选用官方服务器,我想试试本地服务器在遥控时的响应速度是不是会快一点。
步骤2 搭建仰望小车M10版
我的M10版仰望小车是模块化设计,它分为前轮转向部分、后轮驱动部分和M10车体连接部分,在做其它项目时可以方便的拆开,用小车时可以快速组装。


步骤3 手机Blynk app项目设置
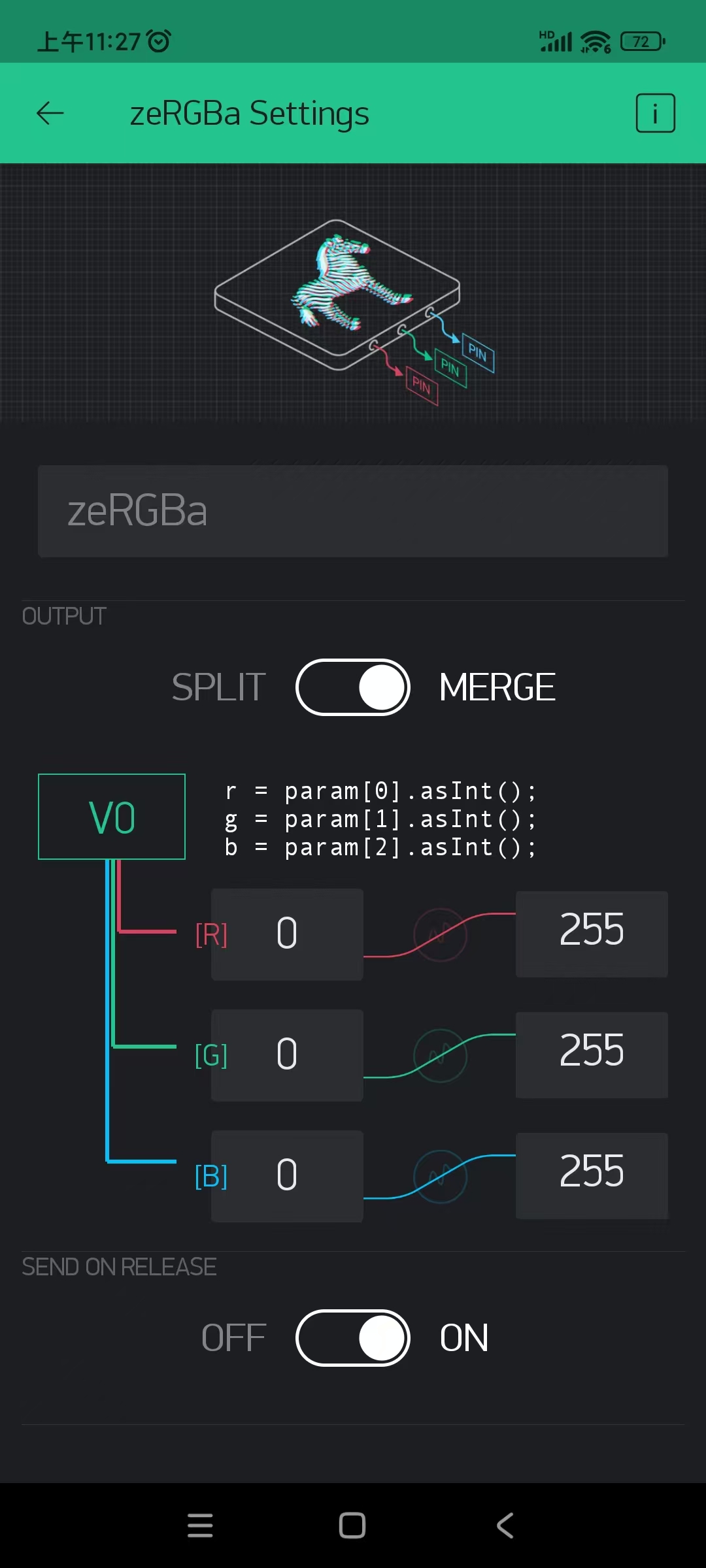
1、新建项目,命名为仰望遥控,添加zeRGBa和摇杆控件,初步计划用RGB控件控制小车上的RGB灯调色(这个均属无用装逼),用摇杆X向控制转向,摇杆Y控制小车的前进后退和停止。
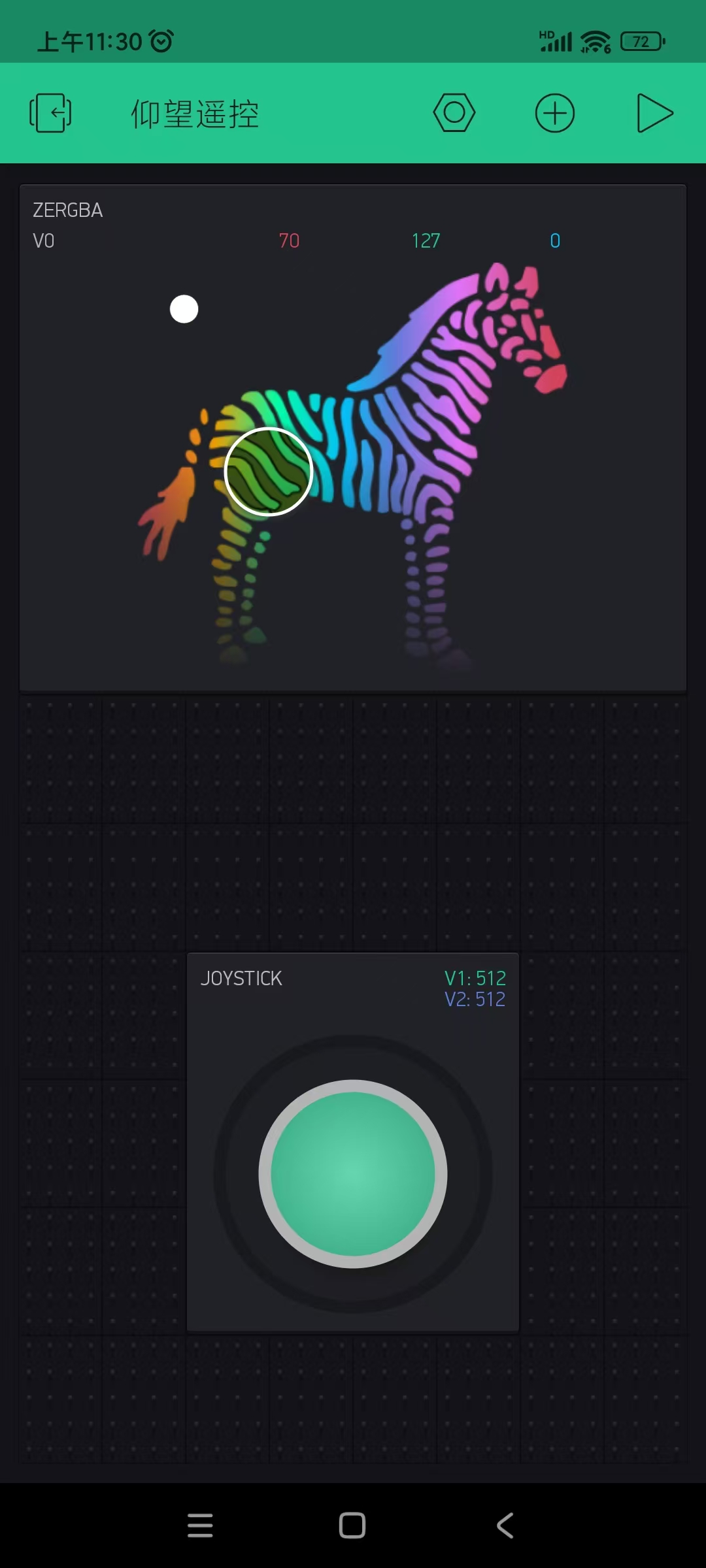
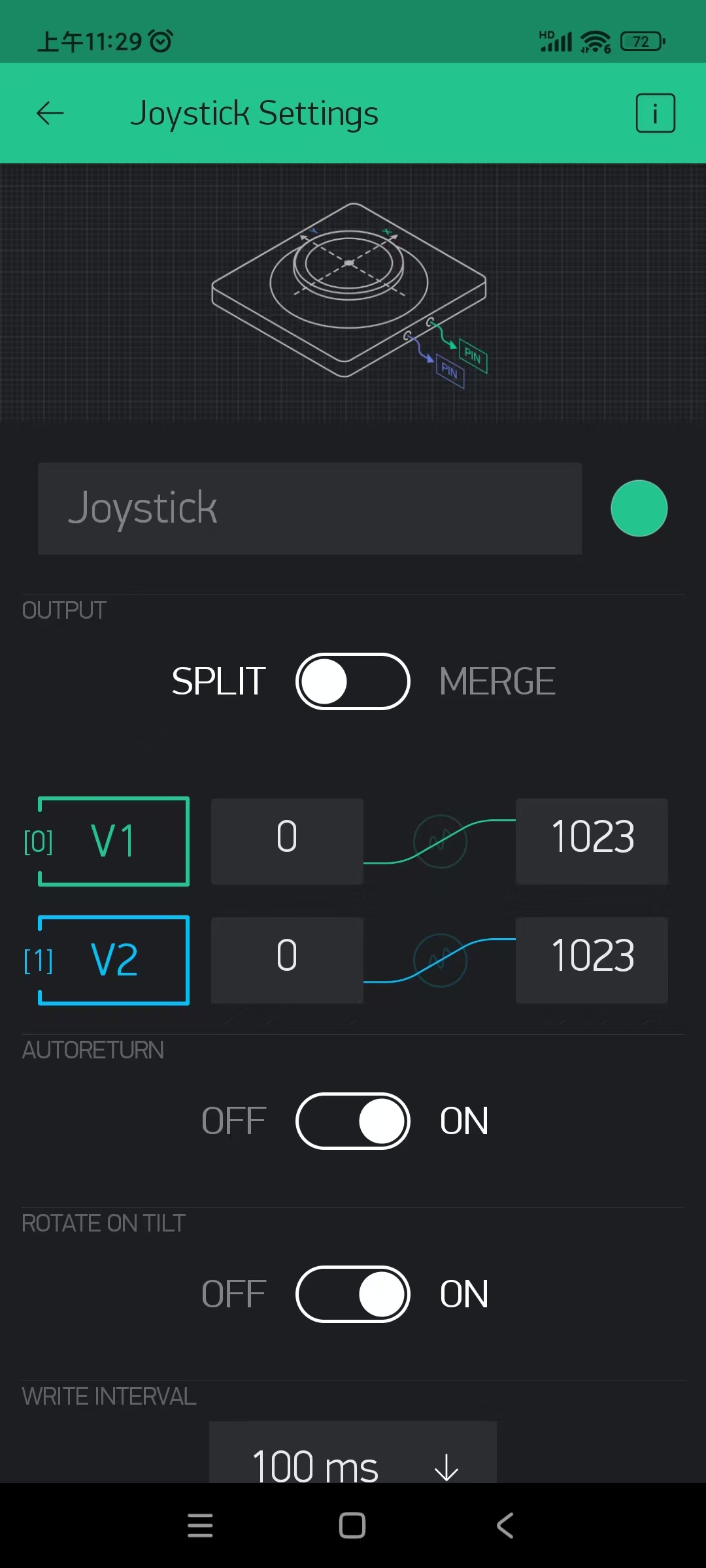
2、设置虚拟引脚,RGB--V0,摇杆X--V1,摇杆Y--V2。
3、Copy all获取项目授权码,转存到电脑上备用。

步骤4 仰望小车程序编写
1、Mind+--Python模式--加载行空板。

2、加载相关库。


3、M10程序。
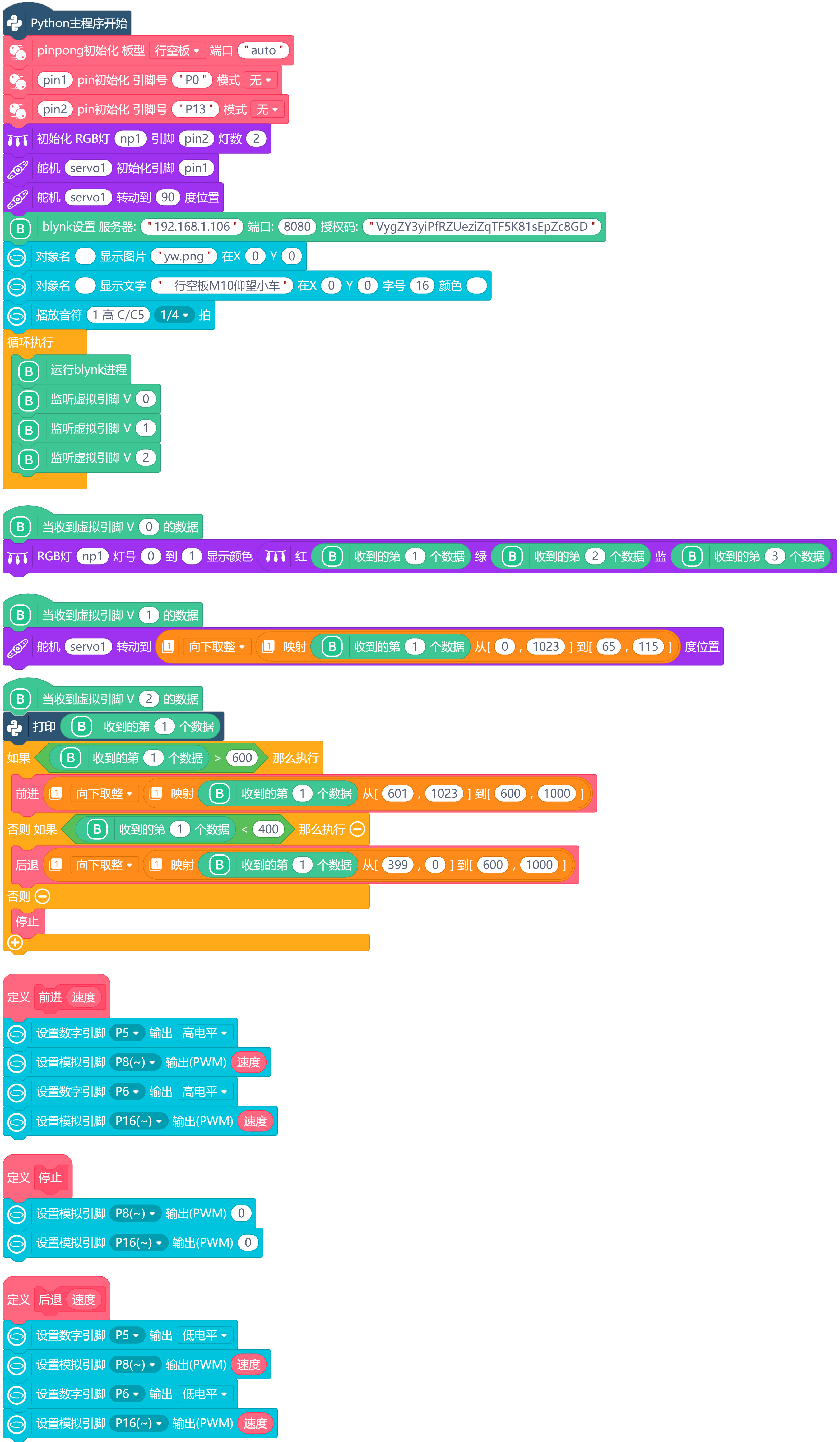
上传,调试通过。
V0三个数据对应RGB。
摇杆X--V1数据0-1023映射到舵机角度,取整。
摇杆Y--V2数据0-1023分成三组,>600前进,
小结:
1、项目中M10上部署了Blynk自启动服务器。
2、M10同时做客户端接入服务器做仰望小车主控,舵机和电机由扩展板提供接口和电力供应。
3、手机端运行Blynk app创建遥控项目,用虚拟摇杆通过虚拟引脚发送控制数据遥控小车运动。


 他的勋章
他的勋章

评论