 返回首页
返回首页
 回到顶部
回到顶部
5.31 阴/小雨 周六

感谢DF的新活动,收到M10扩展板的时节,端午到了。
香粽和艾草的清香漂散在空气中时,我在想,越过山丘,是否有人在守候。
北方的伙伴们,只在影像中看过龙舟,赛龙舟的景象确实激动人心啊。

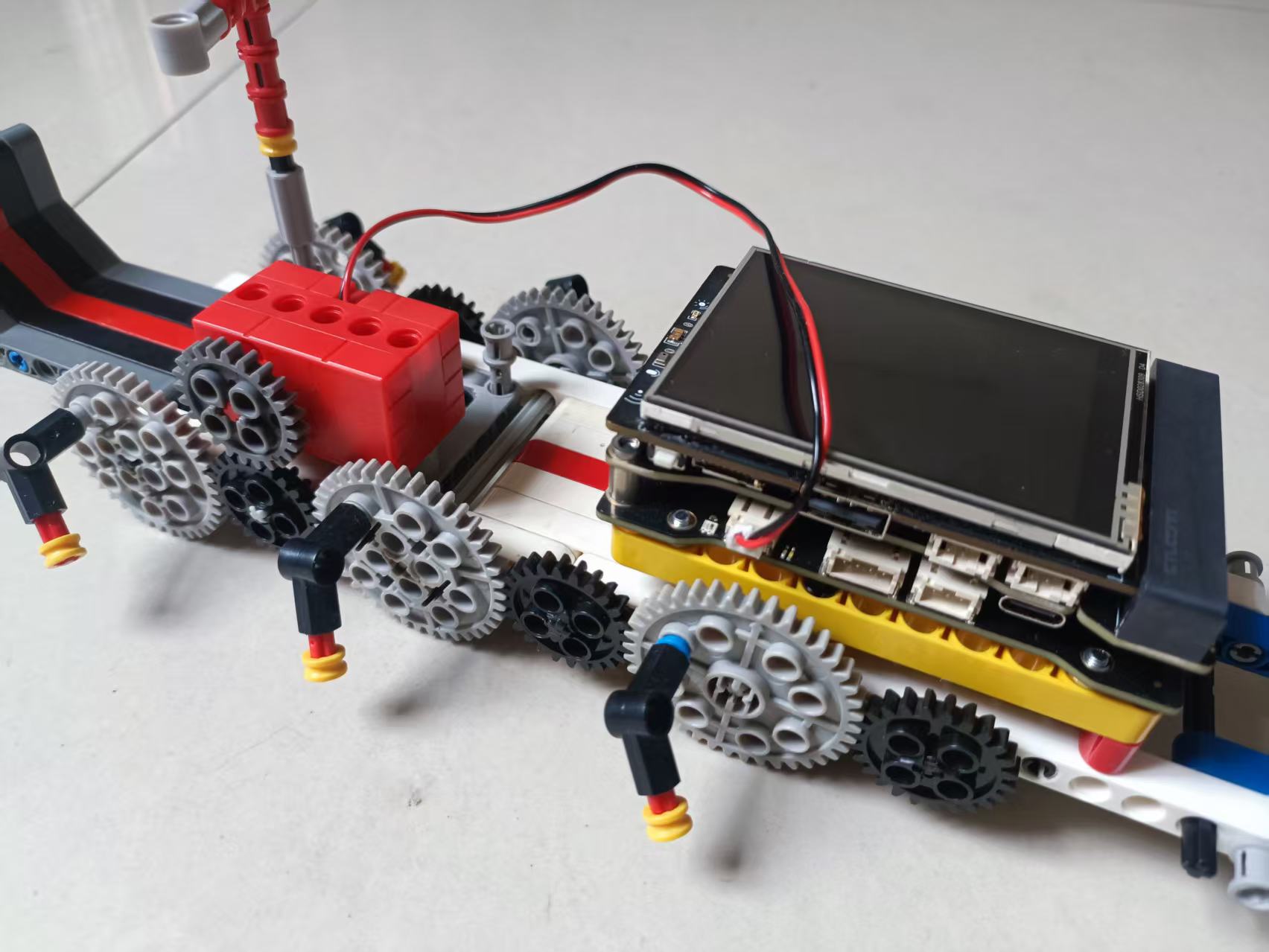
所以我的M10扩展板第一个小项目,我定为龙舟,这是一个二创项目,曾经,我用micro:bit、掌控板驱动过它,这一次,是有电源扩展板加持的M10,因为这个扩展板是兼容乐高孔距的,方便我们用乐高积木来完成小项目。

预设任务:
1、使用M10+扩展板组合驱动龙舟前进后退。
2、尝试用不同的方式来遥控龙舟的运动,比如掌控板的倾斜,行空板K10的语音,红外遥控器的按键,在不同遥控方式的设定中熟悉M10和它的扩展板的功能。
小贴士:
我写的帖子历来简单随意,愿意接受伙伴们的批评,同时要努力向伙伴们学习。
材料清单
- 行空板M10 X1
- 扩展板组合 X1
- 乐高电机 X1
- 乐高龙舟 X1
- 行空板K10 X1
步骤1 认识硬件
1、行空板M10
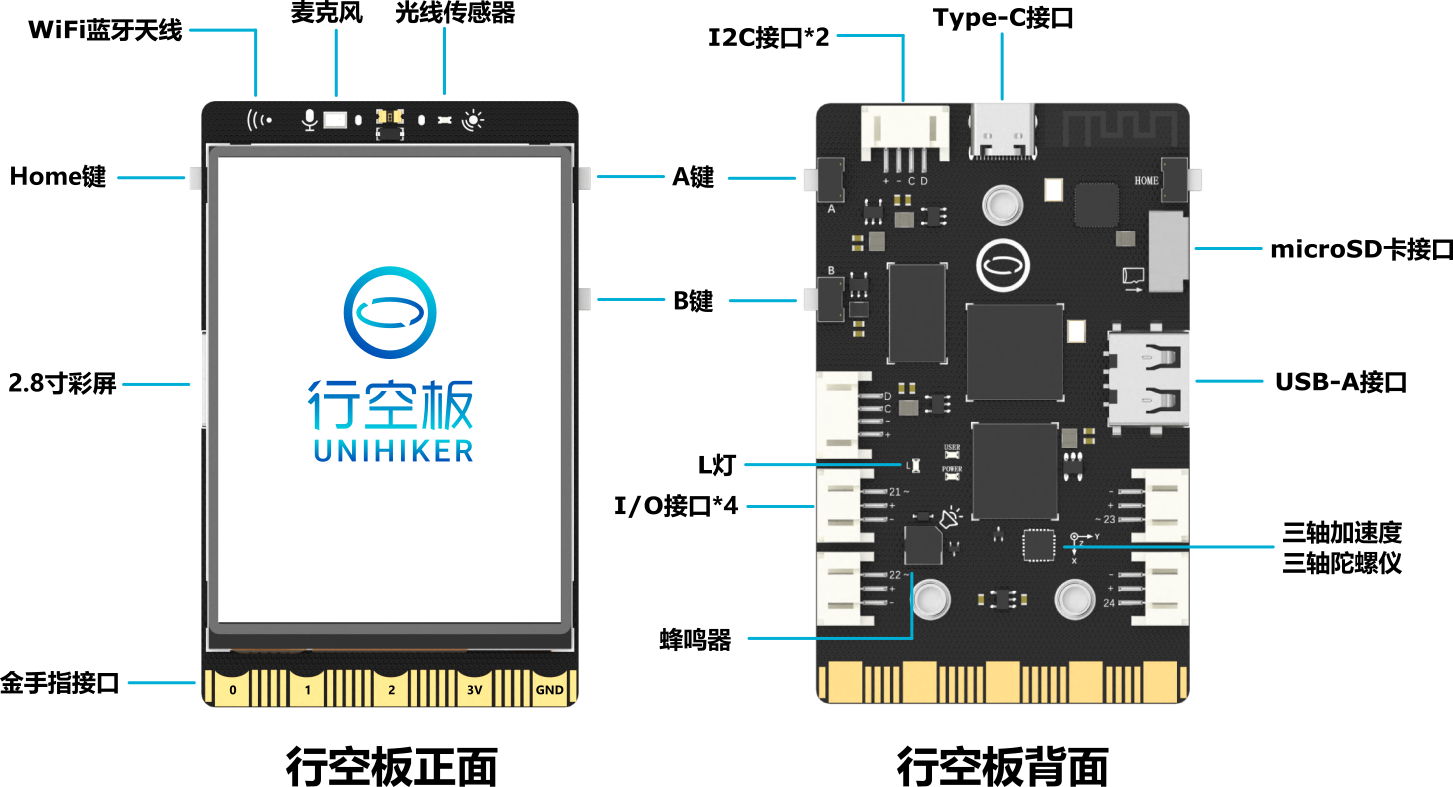
主板背面有P21、P22、P23、P24 四个I/O接口。
2、M10扩展板
双路电机驱动,精准动力输出
独立控制两路直流电机,支持PWM无级调速与正反转调节,板载信号指示灯实时反馈运行状态,适配智能小车、机械臂等高精度控制场景。
通过P5/P8(M1)、P6/P16(M2)四路I/O口即可完成驱动,简化接线复杂度。
在我用M10扩展板的第个小任务是,用M10+扩展板组合来驱动乐高龙舟上的一个电机,所以重点关注的是两个电机接口。
步骤2 尝试驱动电机
在一阵子没有摸M10了,先尝试驱动电机。
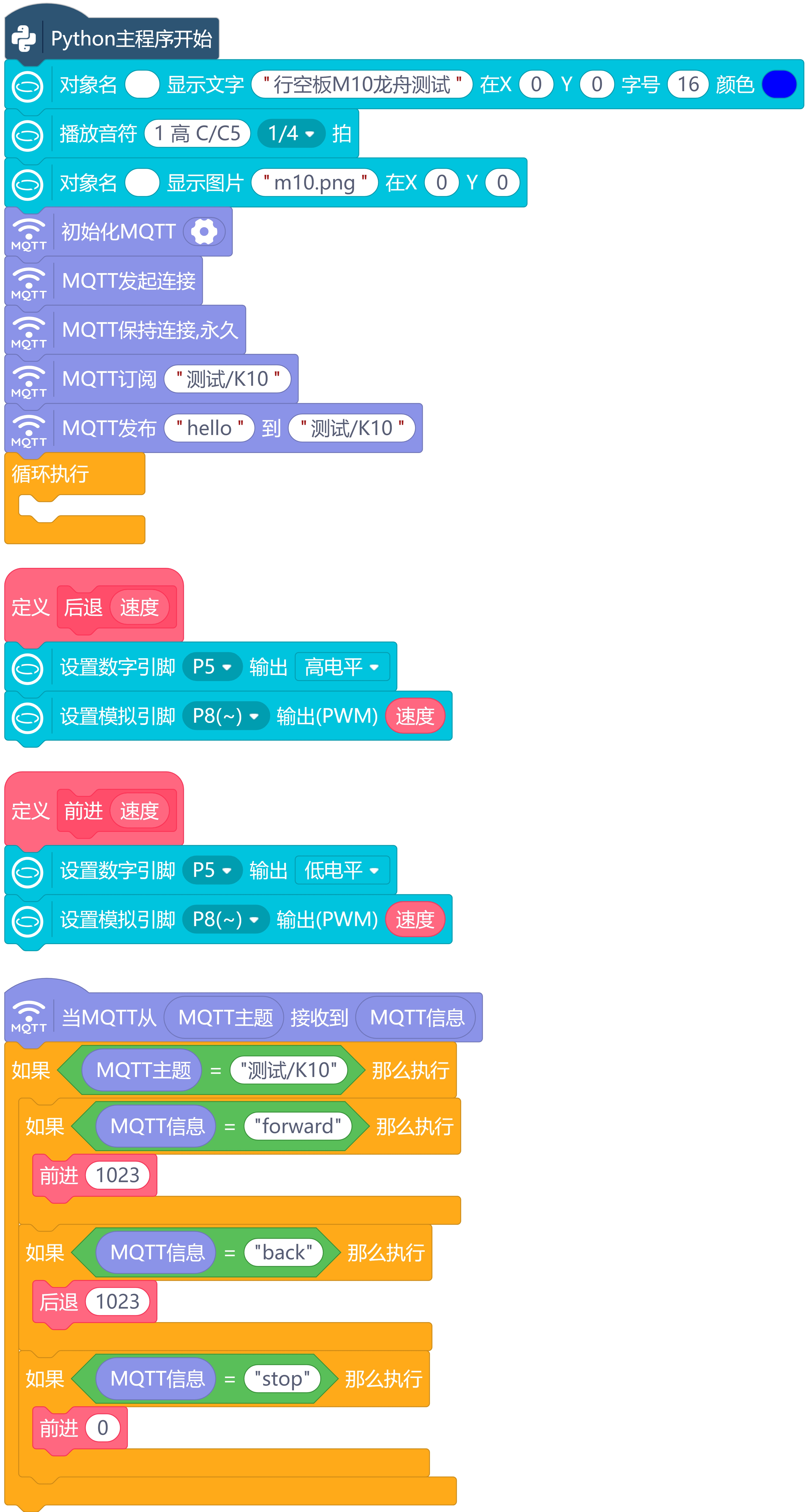
mind+1.8.2,Python模式:

龙舟只用一个乐高电机,接在M1,M1用P5数字口,P8模拟口,需要控制它的前进后退。
所自定义两个函数前进与后退。
测试程序如下:

前进后退都测试通过,开始下一步,遥控控制。
步骤3 插播内容,乐高龙舟的搭建
4月份,我搭建了龙舟模型,没有拆掉,所这次直接用了。
搭建图片如下(感谢章老师提供的图样):
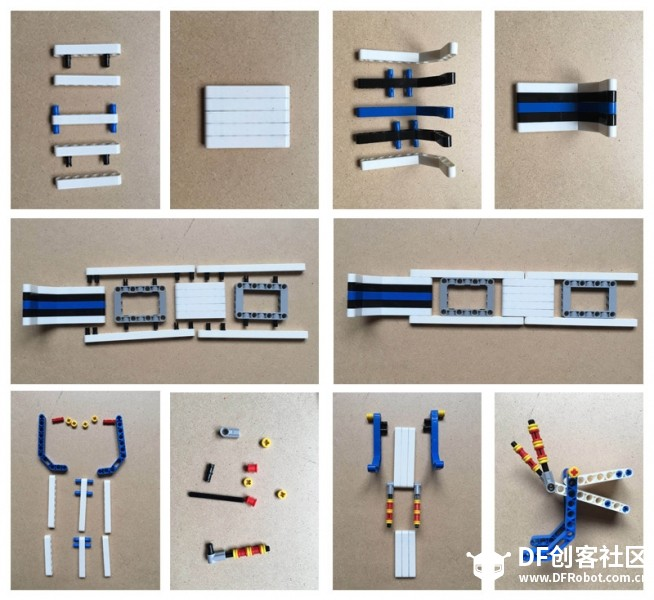
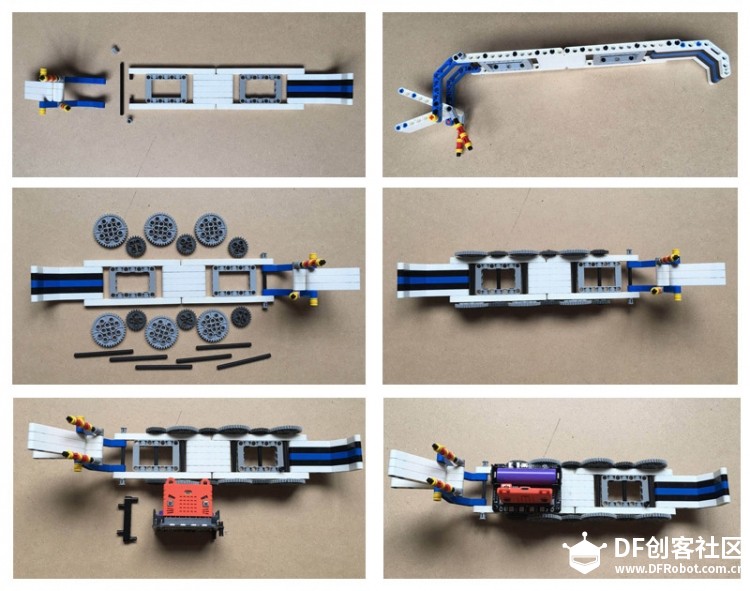
将乐高积木用螺丝拧在背板上,装在龙舟上就可。
步骤4 尝试用K10语音遥控--siot
用K10语音遥控,首先要在K10和M10间建立通信,先尝试用siot。

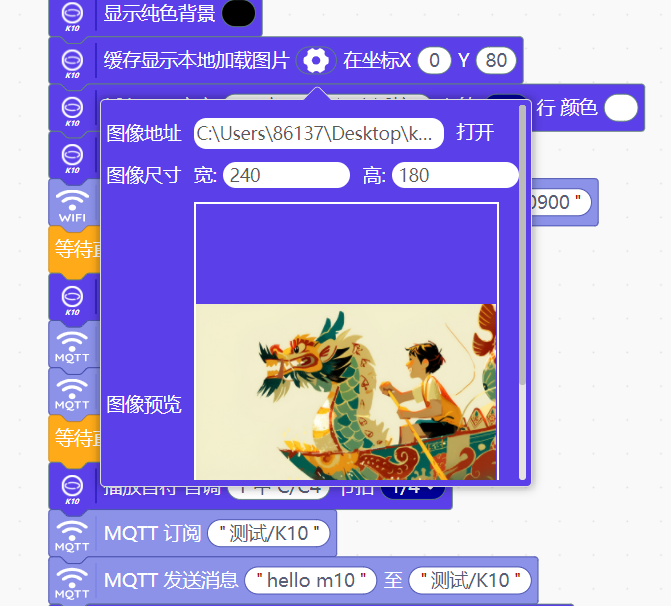
龙舟M10端:
启动siot,打开热点。




程序
开机图片,320*240,png。

siot配置

K10遥控端:


开机图片
siot配置

测试通过,使用时要M10先开机运行,然后K10开机接入siot。
附件
附件


 他的勋章
他的勋章

评论