 返回首页
返回首页
 回到顶部
回到顶部
前言:
这个系列帖子中,我在对以前制作的膝跳反射演示器进行优化尝试,发现并尝试解决制作及运行过程中的各种小问题,给尝试复刻的伙伴一些建议。
知识与资料准备:
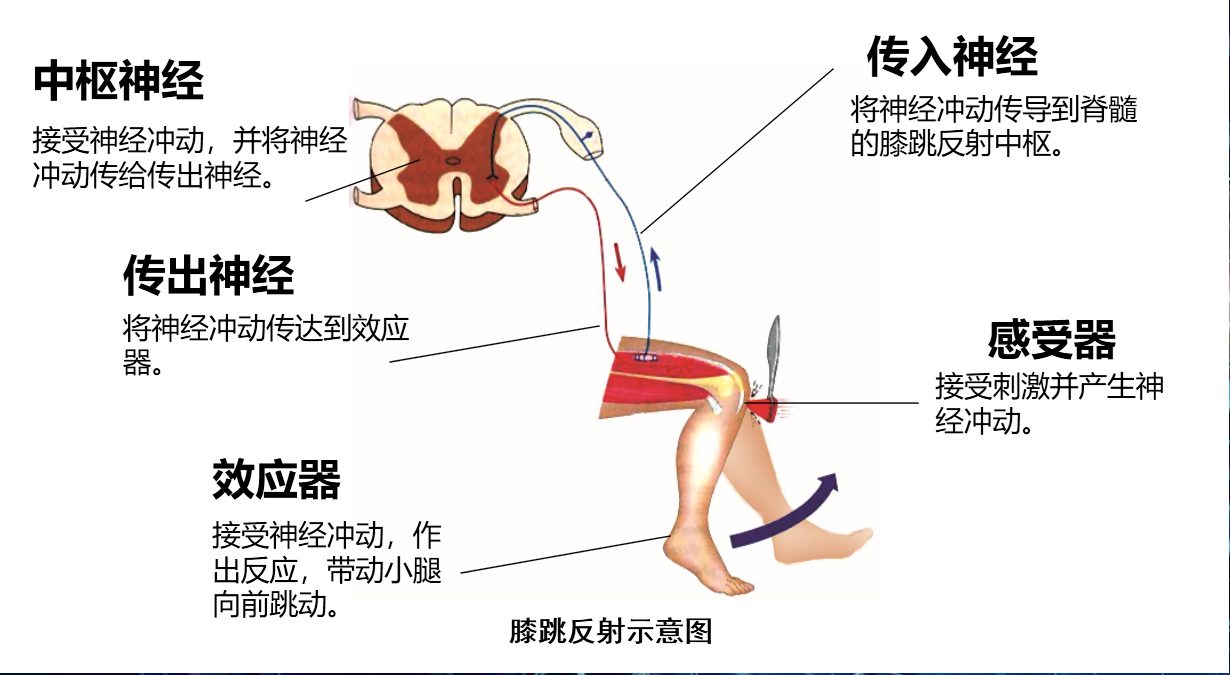
1、膝跳反射是通过叩击膝盖下方的股四头肌肌腱(髌韧带),引发股四头肌收缩、小腿急速前踢的反应 。
反射弧结构:
感受器:股四头肌肌腱内的肌梭(机械感受器),能感知肌肉牵拉刺激 。
传入神经:股神经中的感觉神经元,将信号传递至脊髓 。
神经中枢:脊髓灰质(腰部2-4节)的低级中枢,无中间神经元参与,属单突触反射(直接连接感觉和运动神经元) 。
传出神经:股神经中的运动神经元,将指令传至效应器 。
效应器:股四头肌收缩,同时股二头肌舒张,完成小腿前踢 。
2、苏教版8年级生物中的一页,模型外观计划参考这个图片,模型分成两部分脊髓+能弹跳的腿。
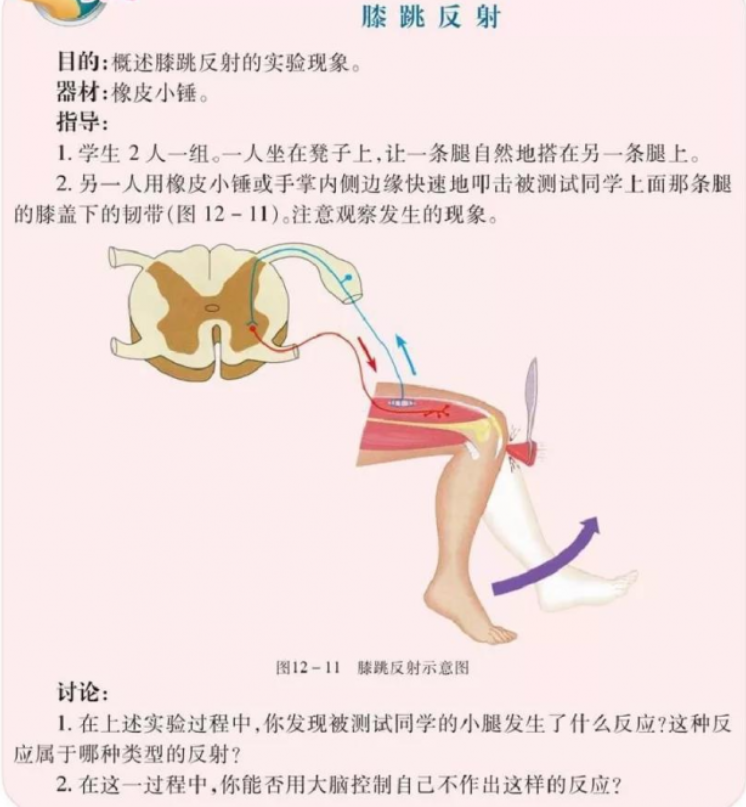
关于膝跳反射,初中生物中讲过,我教过初中生物的,相信大家也都比较了解。
3、更多的知识
在准备的过程中,我学习了高中生物的一些知识。比如膝跳反射是一个只需两个神经元的非条件反射。
下面这个视频中,更是演示了突触:兴奋在神经元间传递的过程(高中生物)。在膝跳反射中,两个神经元间兴奋的传递也是这样子的。
俗话说:好看的皮囊千篇一律,有趣的灵魂百里挑一。
实际上:颜值就是战斗力。
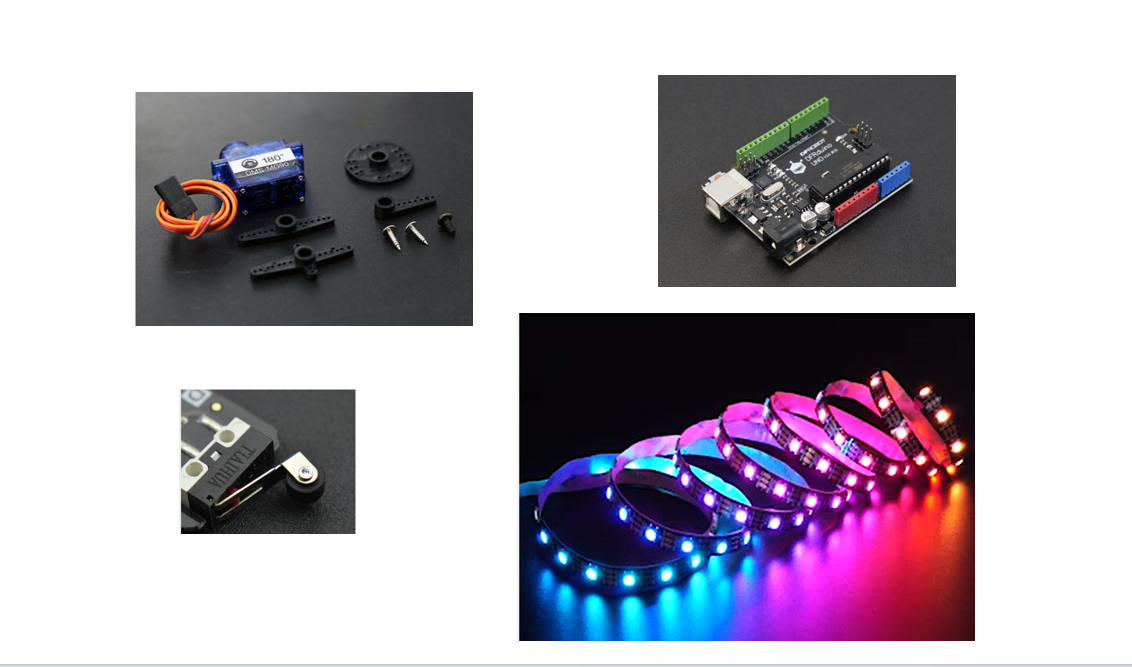
用任意一个主控板+舵机+灯带+碰撞传感器+简单的程序都可以做出一个简明的膝跳反射演示器。
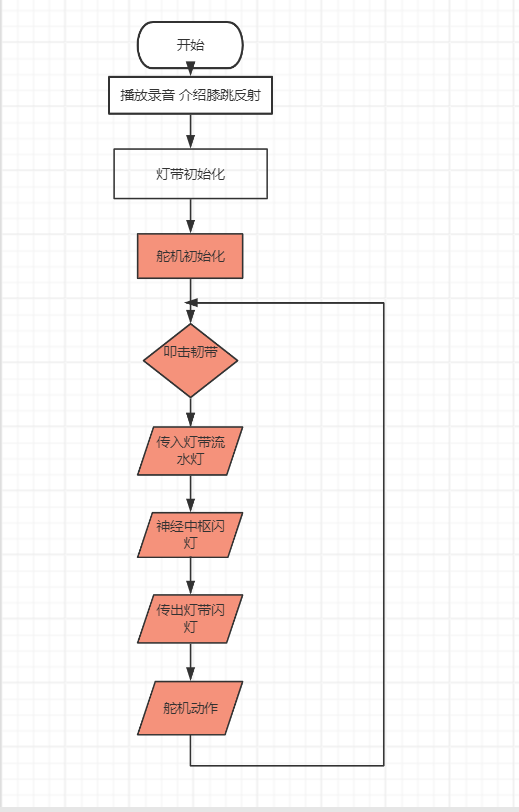
基本逻辑也很简单:
可是只有一堆电子件,虽然有灵魂有肌肉没有外观造型,它并不是一个合格的作品。
所以,膝跳反射演示器就是一个硬件和编程都简单,但其实造型更重要的一个实例。
多年前,我也做过一个膝跳反射演示器发在社区论坛,后来还发表在《爱上机器人》中。
现在看起来,当年的模型显得有点粗糙,所以今天的内容,就从做出一条有点好看的腿开始吧。
我多次做过膝跳反射装置模型,每一次的制作都是根据手里能找到的废旧材料来完成的,所每一个模型都是唯一的,这个制作是我经过多次迭代后发现的,制作比较方便,复刻也比较方便的参数规范,材料也比较固定,大家防制也可以按照指引进行材料准备,所专门写一个帖子来分享给大家。
成品如下,这是摸索中的第一版,再次制作会优化让它更好看些,因为手里只有蓝色材料,所以做出了蓝精灵样子的蓝腿,大家准备白色材料就可以。

我们要准备的材料有:
步骤1 材料准备,废品利用,能省就省
材料1:白色泡沫脚模,寻找它可以有两种方式,从自己同学朋友买的鞋子中找,从鞋店中找店员索要。
我手中这个长度17cm。

材料2:epe珍珠泡沫管,我用的是60*40的,可以用网上下单,选白色。这种材料轻巧,还能透一些光,这样子装在里的灯带也可以传出光来。和上面的脚结合可以造出腿的外部主体。

材料3:9g金属舵机,推荐DF出品,质量好,比较耐用。(不推荐塑料舵机)在装置中,它将扮演效应器的角色。

材料4:碰撞传感器,左右都行,DF商城有售,DF出品,必属精品。

材料5:3-4mm厚度高密度雪弗板,这个很常见,广告公司找一点边脚料就行,或者学校单位废旧宣传板找一块,准备大点的一块当作品背板。我找到的是4mm的,主打一个废品利用,能省就省。
知识:注意不是KT板
硬度与强度:雪弗板密度大、硬度高,可用于复杂模型雕刻或承重要求较高的场景,手指按压不易变形;而KT板内部为泡沫芯,质地较软,易被压扁,适合简单装饰 。
耐候性:雪弗板防水、防潮、耐腐蚀,适合户外长期使用;KT板耐候性较差,长时间暴露易褪色或起泡 。
加工性能:雪弗板可锯、刨、钉、粘,甚至焊接和油墨印刷,类似木材;KT板虽易切割,但无法直接雕刻复杂结构 。
步骤2 开始制作
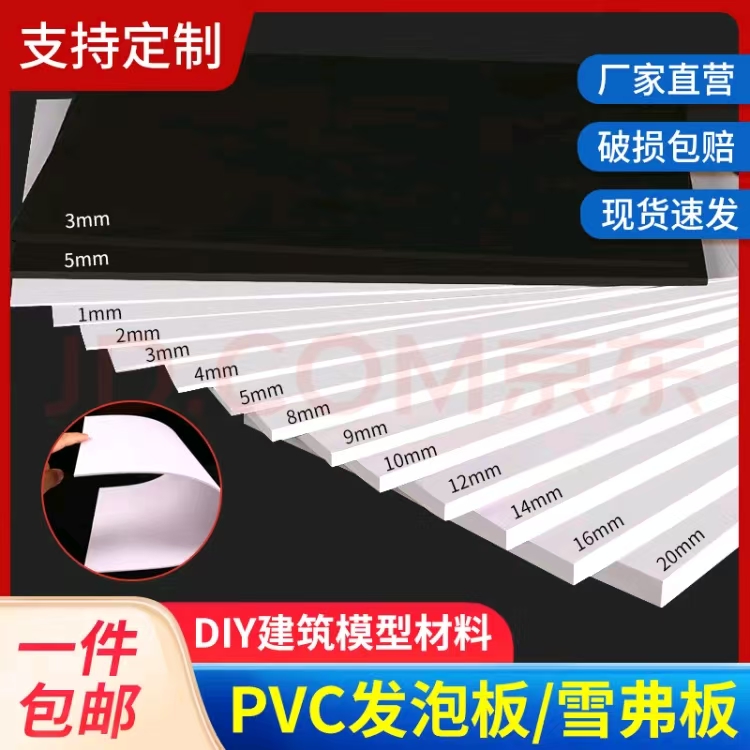
1、取epe珍珠泡沫管一段,约22-23cm。雪弗板一条宽约6.5cm长约18cm,画出小腿形,切割后塞入泡沫管(不合意处随时修改)塑形。雪弗板的作用一是作小腿骨架,为小腿塑形,二是为舵盘和碰撞传感器提供安装位。切削脚上部,胶枪打胶连接。


2、取18cm长一段泡沫管,切合造形梯形雪弗板,塞入,形成大腿造型。雪弗板同样起骨架作用,同时为舵机提供安装位。

分别大腿下部,小腿上部削去一部分。大腿合适位置画出舵机位,刻孔。
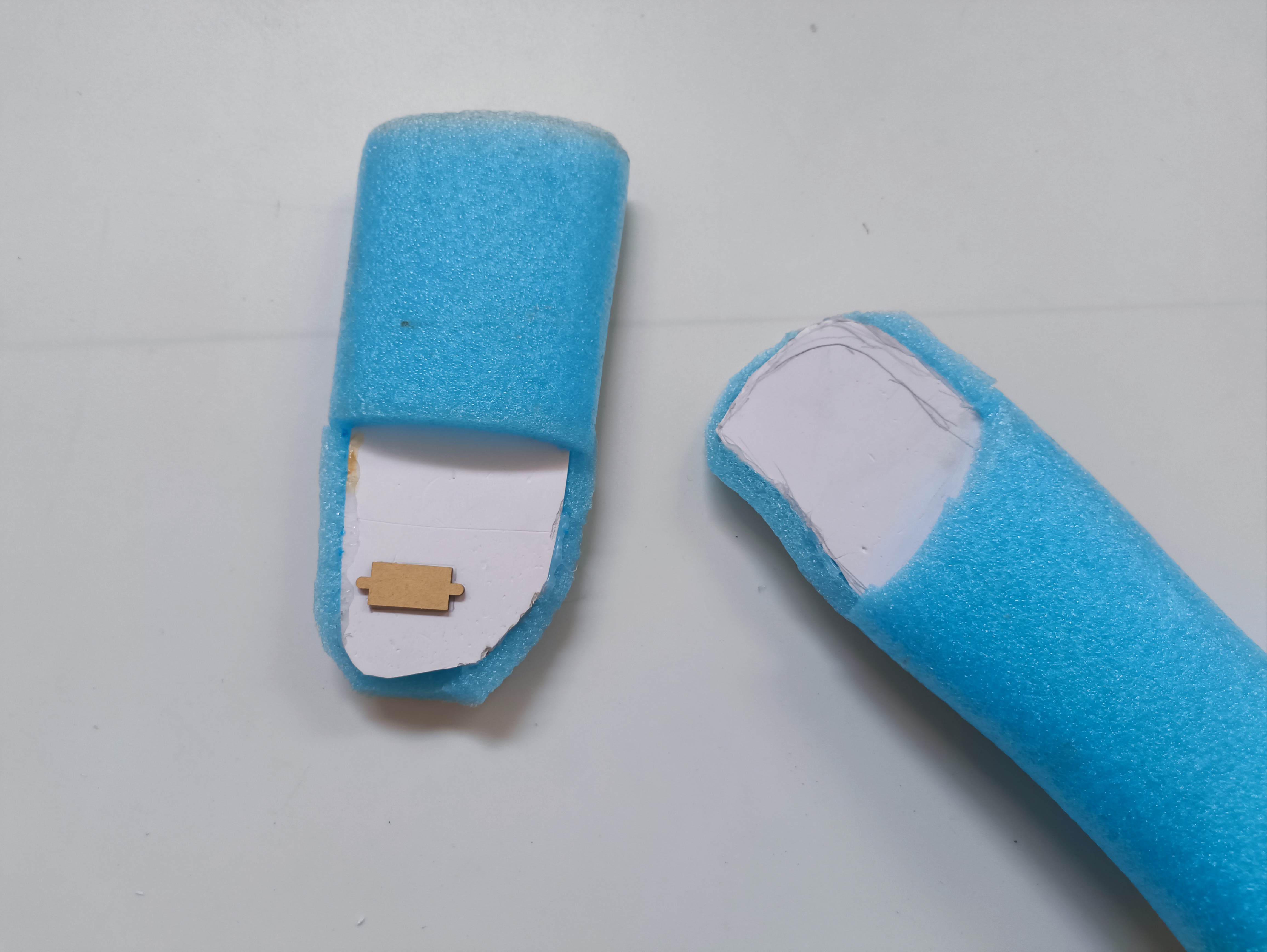
打胶粘紧舵机,注意要写程序将舵机调成90度。
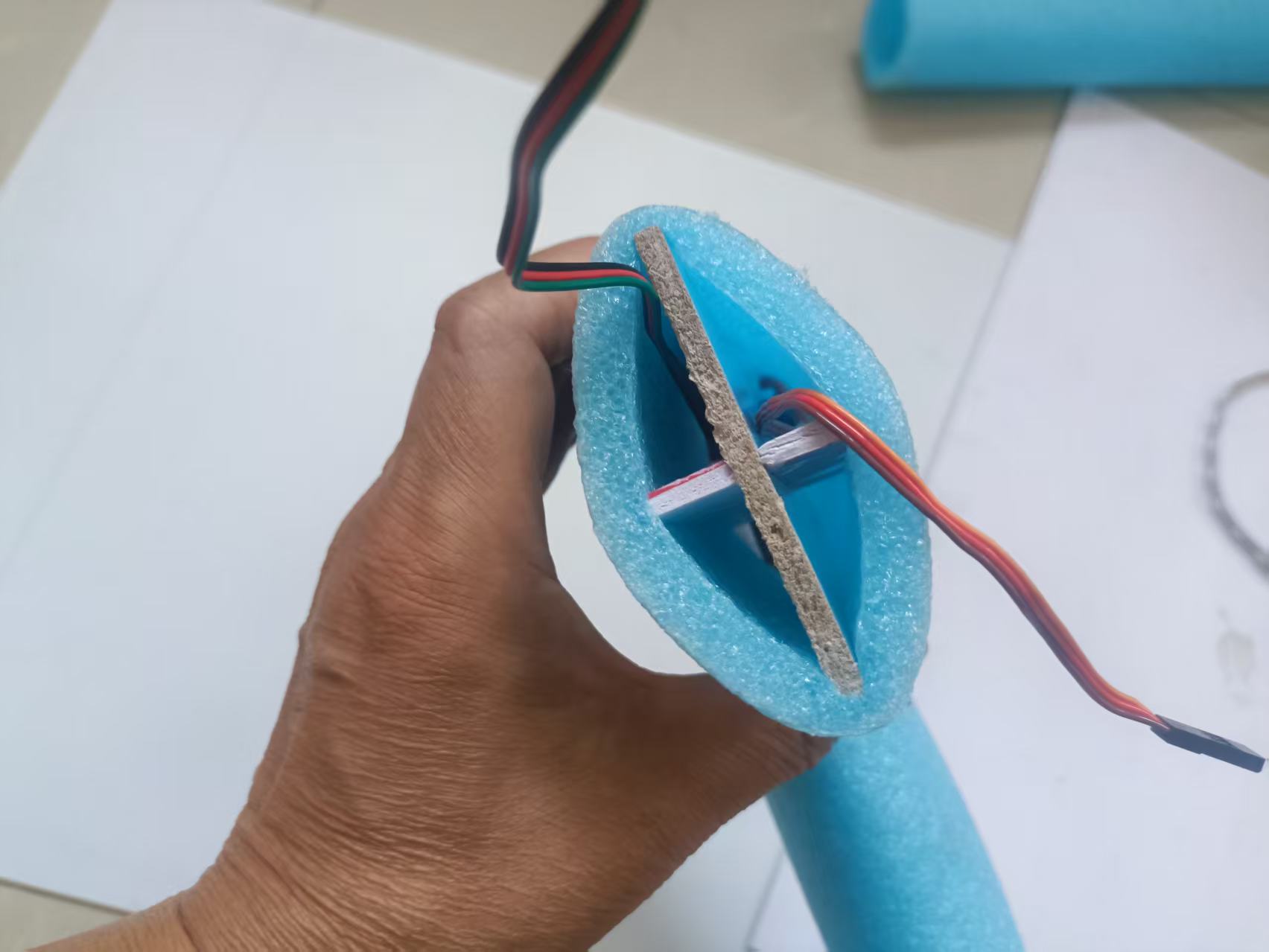
小腿合适位置用圆形舵盘画圆,刻去一层用于放置舵盘,不要全刻透。边沿用胶将雪弗板和泡沫管粘起来塑形。

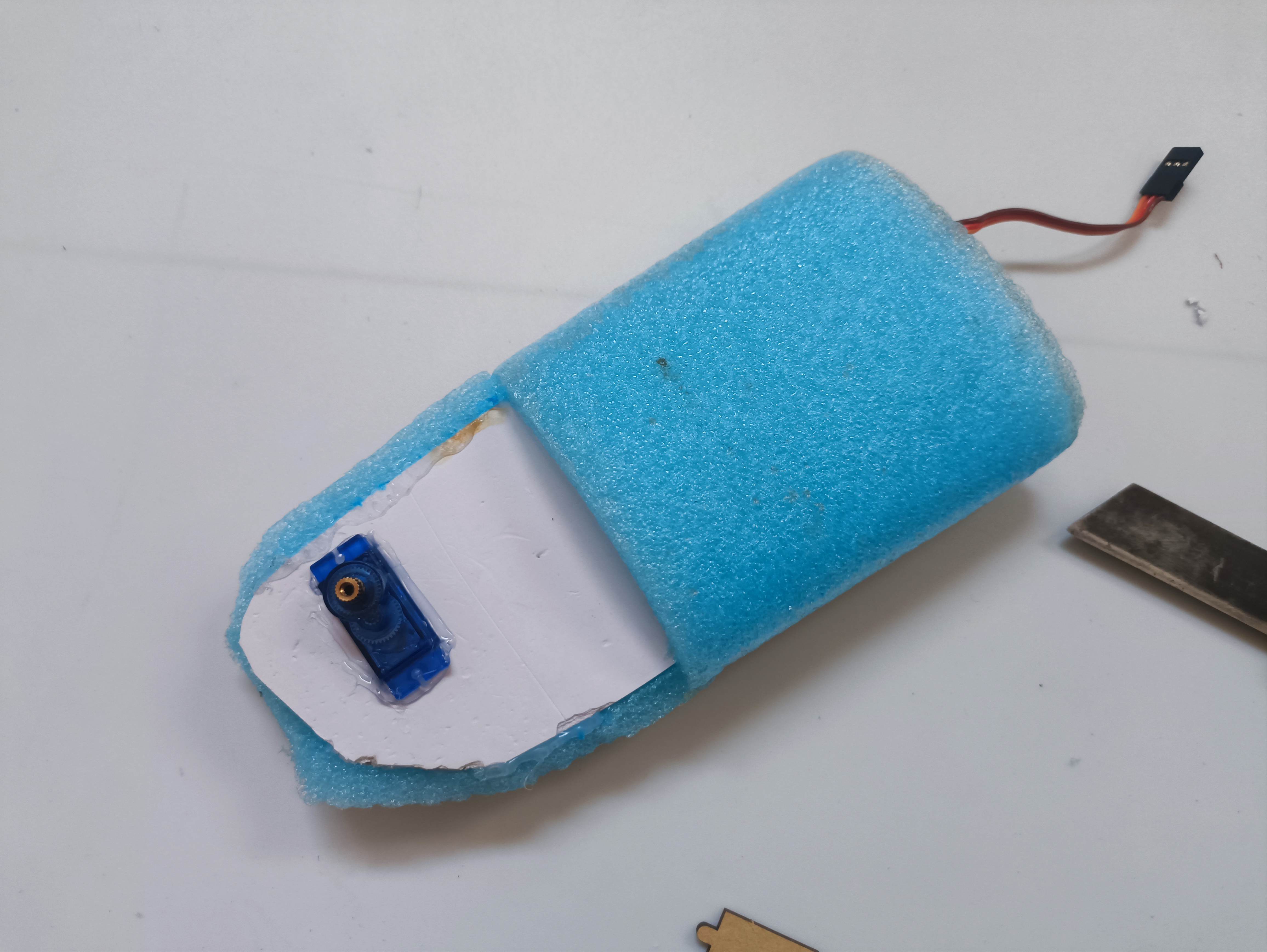
小腿合适位置开孔,打胶固定碰撞传感器。用螺丝将舵盘装在舵机上,打胶将舵机固定在刚才挖的圆坑中。做成一条比较漂亮的立体样子的腿。
里面裁两个小条支撑一下,立体并坚固。
演示时是从侧面看的,看起来还可以,是我做的最好看的腿了。如果有美术生参与,应该能做出更好看的。

步骤3 连接掌控板备用
掌控板,我手里好几块,搞作品消费掉它吧。
N+扩展板,很喜欢用的掌控扩展板,小巧,接口还开放兼容性好带电池。

碰撞传感器接掌控板P1,它将模拟连接感受器的韧带。
金属舵机接掌控板的P0,它将模拟效应器材的股部肌肉。
为什么要用掌控板来单独控制舵机呢,在后面的帖子中将会解释。
小结:
本帖子记录了一条膝跳反射演示装置知识准备和腿模型的制作过程,美中不足的是没有用白色材料制作,颜色怪怪的。
另外:
雪弗板又轻硬度适中可塑性好,对于没有激光切割机的我们来说,太友好了吧。
比如,很方便就可以做出简单的腿模型,当然,没有外面的包装物,显得不那么漂亮了。


 他的勋章
他的勋章

罗罗罗2025.12.04
666