 返回首页
返回首页
 回到顶部
回到顶部
2.8 晴 冷
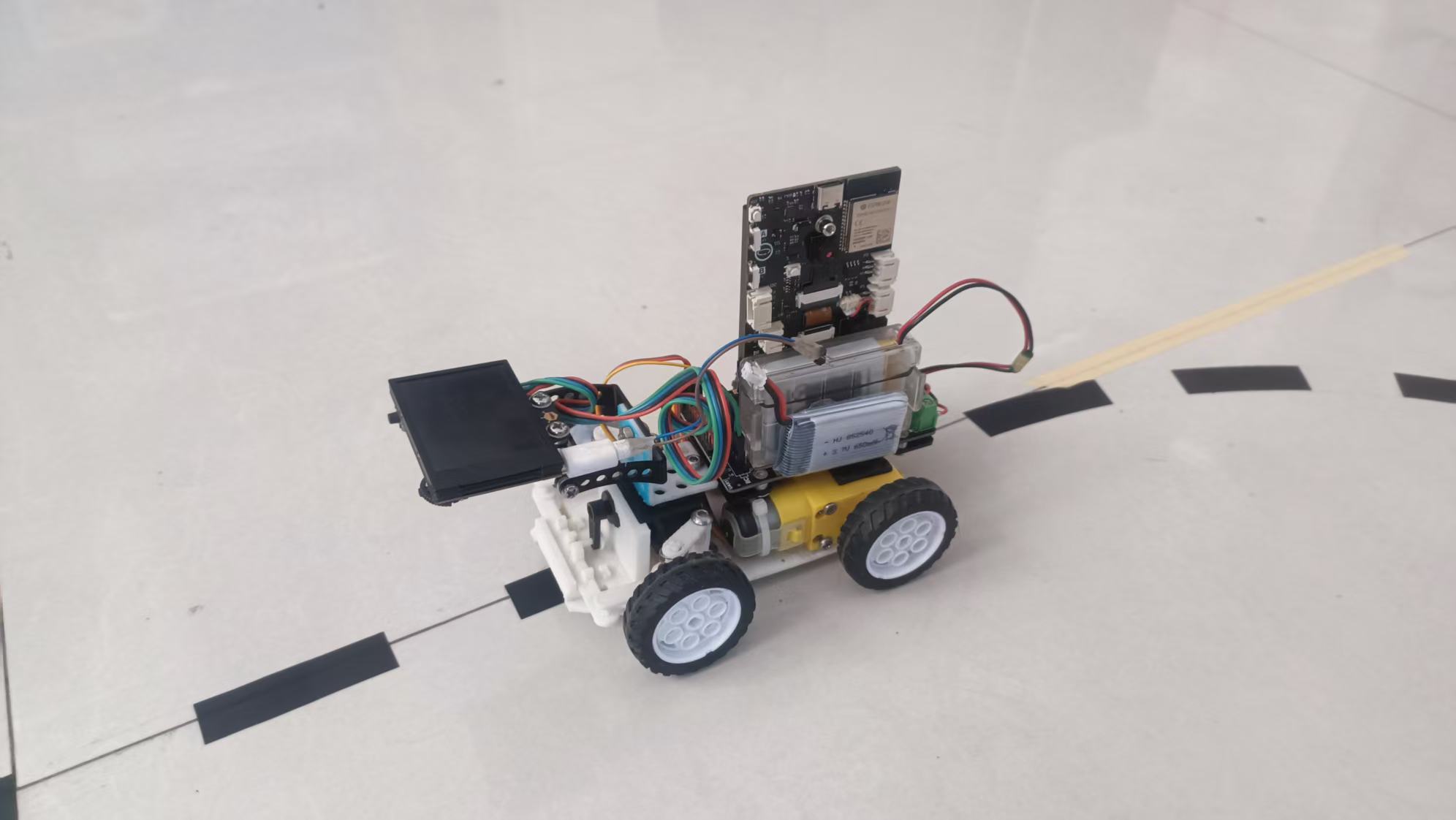
继续肝3D打印版K10主控的四轮小车。
这次是+二哈视觉寻线。
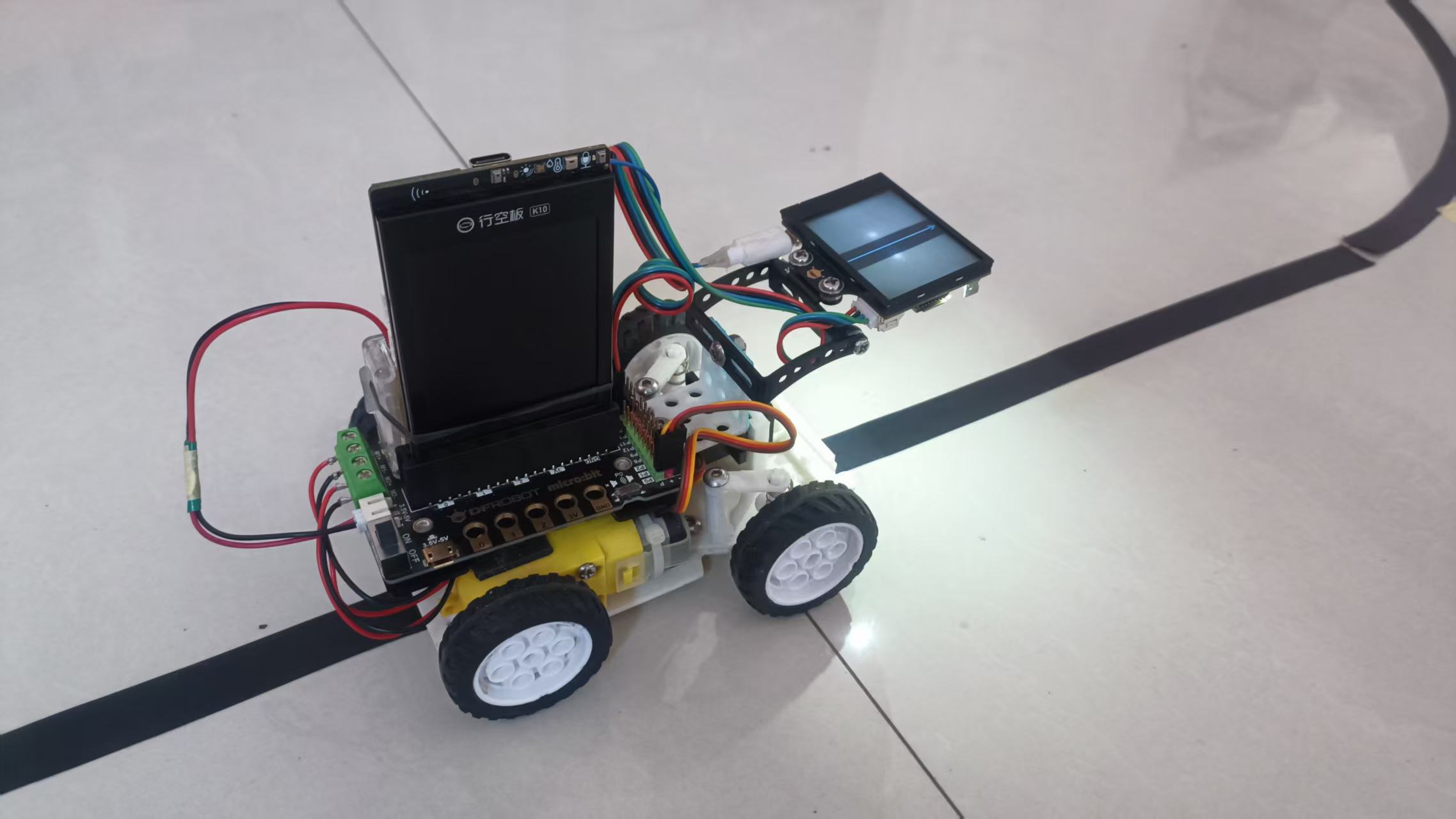
因为车身比较短,跑起来比较流畅,虚线也可以。
请看演示。
材料清单
- K10 X1
- 四轮小车底盘 X1
- 扩展板 X1
- 电池 X2
小车的结构在造物记的另一个作业中:
这里不再多写了。
二哈视觉寻线的技术分析在造物记的作业中。

当把二哈装上这个3D打印四轮方向舵小车,加上前面的调试经验,很快就完成任务了。
程序如下:

小结:
1、注意舵机转动方向大小根据情况调节,车速和前进方向调节。
2、二哈寻线重新学习地图环境,二哈视野调节。


 他的勋章
他的勋章


评论