 返回首页
返回首页
 回到顶部
回到顶部
一、前言
同事有一些设备闲置,之前一直对模拟角度传感器陌生,不知道如何使用。翻阅了教程。于是实践一下。
材料清单
- 模拟角度传感器Rotation Sensor V1(Arduino兼容) X1 链接
材料清单
- Arduino UNO主板 X1
步骤1 连接Arduino UNO主板与模拟角度传感器Rotation Sensor V1(Arduino兼容)
步骤2 启动Mind+软件,连接Arduino UNO 主板与MInd+软件。
步骤3 编写程序并上传
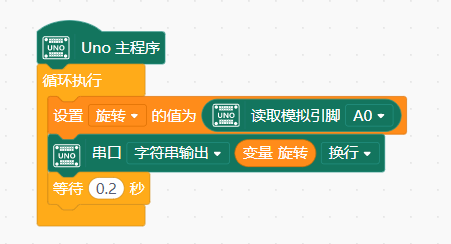
五、总结:为什么输出的数值是0到1023?
300度模拟旋转角度传感器输出数值1023可能与它的工作原理和输出特性有关。
模拟旋转角度传感器内部通常采用线性电位器,当旋转角度发生变化时,电位器的阻值也会随之变化,导致输出端的电压发生改变。这种变化是连续的,并且在一定范围内呈线性关系。输出的数值表示的是模数转换后的结果,即ADC(Analog-to-Digital Converter)值。
在许多微控制器(如Arduino)中,内置的ADC模块通常具有1024个不同的数值来表示从最低到最高的模拟信号强度,也就是0到1023。这个范围基于微控制器的分辨率,即它能够区分的最小信号变化。对于一个工作在5V直流电源下的系统,如果旋转角度传感器的电位器总电阻为10KΩ,并且具有良好的线性度(±2%),那么当旋转至最大有效角度时,理论上应该接近或达到ADC的最大数值。
因此,如果一个300度的模拟旋转角度传感器输出数值1023,这通常意味着传感器已经旋转到了其设计的最大角度范围,且此时传感器输出的模拟电压接近于微控制器所能读取的最大值。
需要注意的是,实际使用中可能会由于多种原因造成数值偏差,包括电位器的线性度、精确性、接线问题以及微控制器的ADC精度等。
六、疑问
不知道掌控板能不能用?答案是可以的。经试验证明也是可以的。
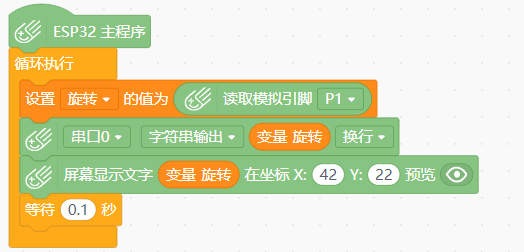
掌控板集成了ESP32芯片,该芯片具备两个12位的SAR(逐次逼近)ADC。这意味着ADC能够提供12位的分辨率,在量化模拟信号到数字值时可以有2^12,即4096个不同的数值。由于计数是从0开始的,因此掌控版的ADC可以读取从0到4095的数字,这也解释了为何串口0能读取的最大数据是4095。
掌控板通过这样的设计提供了灵活的ADC配置,可以根据实际需求选择不同的分辨率,如12位、11位、10位或9位,以适应各种应用场景。这种灵活性使得掌控版非常适合用于教育和创客项目,因为它可以根据项目的具体需求调整ADC的精度和性能。


 他的勋章
他的勋章




评论