 返回首页
返回首页
 回到顶部
回到顶部
Arduino是一个开放源码的电子原型平台,它可以让你用简单的硬件和软件来创建各种互动的项目。Arduino的核心是一个微控制器板,它可以通过一系列的引脚来连接各种传感器、执行器、显示器等外部设备。Arduino的编程是基于C/C++语言的,你可以使用Arduino IDE(集成开发环境)来编写、编译和上传代码到Arduino板上。Arduino还有一个丰富的库和社区,你可以利用它们来扩展Arduino的功能和学习Arduino的知识。
Arduino的特点是:
1、开放源码:Arduino的硬件和软件都是开放源码的,你可以自由地修改、复制和分享它们。
2、易用:Arduino的硬件和软件都是为初学者和非专业人士设计的,你可以轻松地上手和使用它们。
3、便宜:Arduino的硬件和软件都是非常经济的,你可以用很低的成本来实现你的想法。
4、多样:Arduino有多种型号和版本,你可以根据你的需要和喜好来选择合适的Arduino板。
5、创新:Arduino可以让你用电子的方式来表达你的创意和想象,你可以用Arduino来制作各种有趣和有用的项目,如机器人、智能家居、艺术装置等。

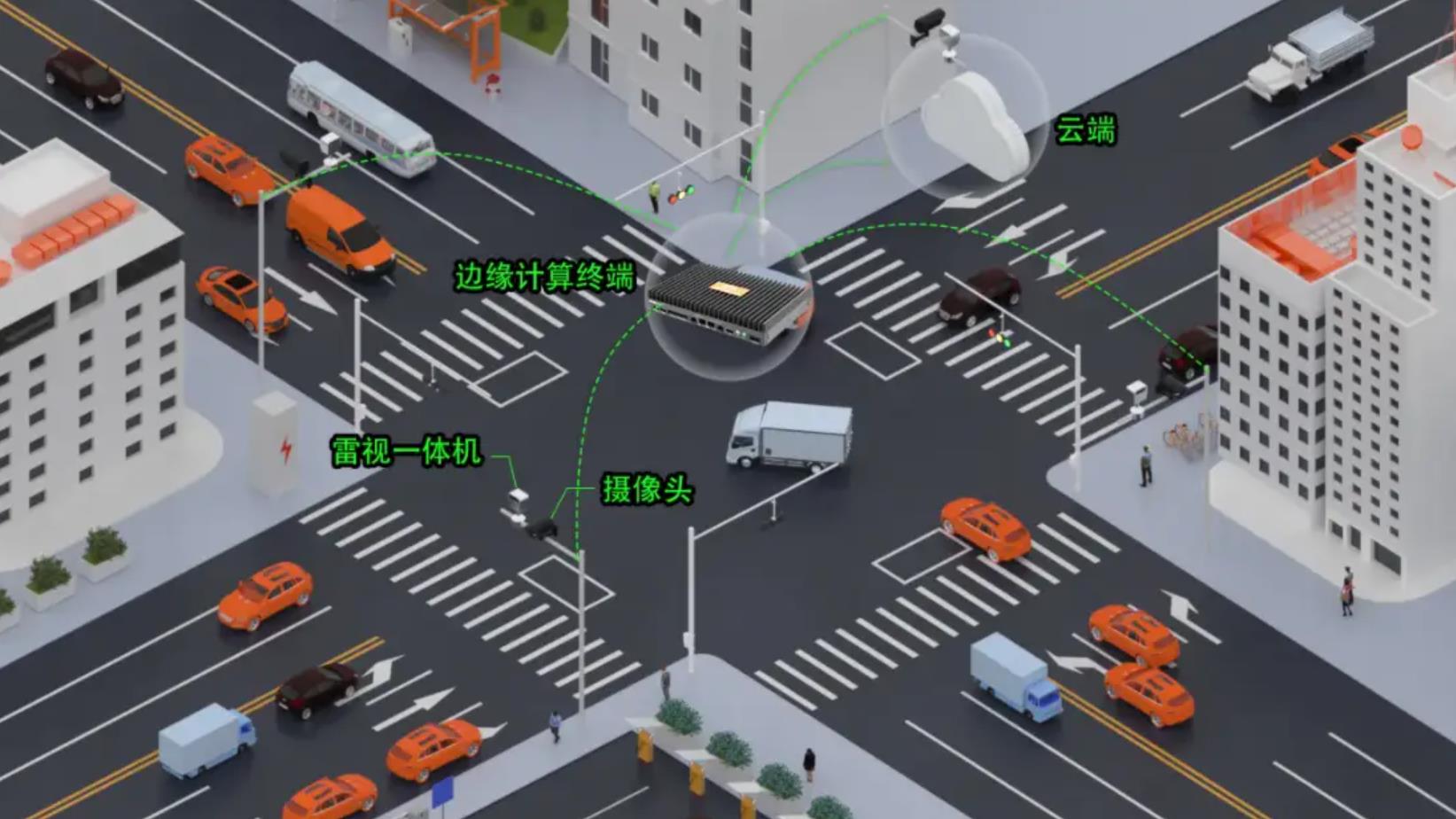
Arduino智慧交通是一种基于Arduino技术的智能交通系统,旨在提供交通管理和优化方案。下面将详细解释其主要特点、应用场景以及需要注意的事项。
主要特点:
1、实时数据采集和处理功能:系统可以通过连接传感器和Arduino控制器,实时采集交通相关数据,如交通流量、车辆速度、道路状态等。通过数据处理和分析,可以生成实时的交通信息和统计数据。
2、智能交通控制和优化功能:系统可以根据采集到的数据,实现智能的交通控制和优化。通过控制信号灯、调整道路限速、优化车辆流量等方式,改善交通拥堵、提高交通效率。
3、交通事故预警和安全管理功能:系统可以通过数据分析和模式识别,实现交通事故的预警和安全管理。一旦检测到异常情况,如交通事故风险区域、超速行驶等,可以及时发出警报并采取相应的安全措施。
4、用户信息服务和智能导航功能:系统可以向用户提供实时的交通信息服务和智能导航功能。通过连接到移动设备或车载导航系统,为用户提供最佳的路线规划、交通拥堵提示等服务。
应用场景:
1、城市交通管理:系统可应用于城市交通管理,通过智能交通控制和优化,改善交通拥堵、提高交通效率。可以在城市主要道路、交叉口等关键位置部署传感器和控制装置,实现交通流量的实时监测和控制。
2、高速公路管理:系统可用于高速公路的交通管理。通过部署传感器和摄像头,实时监测车辆流量、限速情况等,并提供交通事故预警和安全管理服务,提高高速公路的安全性和通行效率。
3、智能车辆导航和驾驶辅助:系统可与车载导航系统集成,为驾驶员提供智能导航和交通信息服务。通过实时的交通信息和路况提示,帮助驾驶员选择最佳路线,避免交通拥堵和事故风险。
需要注意的事项:
1、数据隐私和安全:在采集和处理交通数据时,需要保护用户的隐私和数据安全。合理采用数据加密、访问控制等措施,确保交通数据不被泄露或滥用。
2、系统可靠性和稳定性:智慧交通系统需要具备高可靠性和稳定性,以确保交通信息的准确性和实时性。系统的硬件设备和软件应具备良好的稳定性和容错性,以应对突发状况和故障。
3、法律法规和道路安全:在使用智慧交通系统时,需要遵守相关的法律法规和道路安全规定。系统设计和使用应符合交通法规,保障交通安全和秩序。
总结而言,Arduino智慧交通具有实时数据采集和处理、智能交通控制和优化、交通事故预警和安全管理、用户信息服务和智能导航等主要特点。它适用于城市交通管理、高速公路管理和智能车辆导航等场景。在使用此技术时,需要注意数据隐私和安全、系统可靠性和稳定性,以及法律法规和道路安全等事项。

Arduino V2I(车对基础设施)通信在智能交通中指的是使用Arduino平台实现车辆与基础设施之间的通信。它允许车辆与交通灯、路边传感器和停车设施等基础设施组件进行实时双向通信。以下是Arduino V2I通信的主要特点、应用场景和考虑因素:
主要特点:
实时通信:V2I通信允许车辆使用Arduino及相关通信模块与基础设施组件进行实时通信。
交通信息交换:V2I通信使车辆能够从基础设施接收实时交通信息。这些信息可以包括交通拥堵、事故警报、道路施工更新等。车辆可以在连接到Arduino的屏幕上显示这些信息,帮助驾驶员做出明智的路线选择和驾驶决策。
交通流量优化:V2I通信有助于车辆与基础设施之间的协调。通过优化交通信号控制和智能交叉口管理,提高交通流量,减少拥堵,增强道路效率。
增强安全性:V2I通信提供车辆与基础设施之间的实时安全警报和信息交换。例如,交通灯可以向车辆发送警告信号,提示驾驶员减速或注意行人。基础设施还可以提供路况警报,帮助驾驶员预防潜在的危险和事故。
应用场景:
智能交通系统:V2I通信在智能交通系统中有广泛的应用。通过与交通灯和路边传感器通信,车辆可以获取实时交通状况、道路信息和停车设施可用性,提供高效的导航和出行建议。
公交优先系统:V2I通信可用于公交优先系统,优化交通信号灯的时序,减少公交旅行时间,提高公交服务效率,增强公共交通的可行性。
自动驾驶:V2I通信对于自动驾驶至关重要。通过与交通灯和其他基础设施组件通信,自动驾驶车辆可以获得交通信号灯状态、道路信息和交通状况,以优化路径规划和决策制定,确保更安全、更高效的自动驾驶体验。
需要注意的事项:
通信协议:在实现V2I通信时,需要选择合适的通信协议,例如DSRC(Dedicated Short Range Communications)或者基于LTE/5G的通信协议。选择适合的协议可以确保通信的稳定性和可靠性。
安全性:由于V2I通信涉及到车辆和基础设施之间的数据交换,安全性是一个重要的考虑因素。确保通信的加密和身份验证,以防止数据泄露和未经授权的访问。
数据处理和分析:V2I通信涉及处理和分析从基础设施传感器和其他车辆收集的大量数据。高效的数据处理和分析方法对于获得有意义的洞察和实现智能决策制定是必要的。
下面是三个实际运用程序参考代码案例,涉及Arduino智慧交通中车辆对基础设施(V2I)通信:
案例1、车辆发送交通状态信息:
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(9, 10);
struct TrafficStatus {
int vehicleId;
int speed;
int distance;
};
void setup() {
radio.begin();
radio.openWritingPipe(0xF0F0F0F0E1LL);
}
void loop() {
TrafficStatus status;
status.vehicleId = 1234;
status.speed = 50;
status.distance = 100;
radio.write(&status, sizeof(status));
delay(1000);
}要点解读:
使用RF24库进行无线通信,通过nRF24L01模块与其他设备进行通信。
在setup()函数中,初始化无线电,并设置写入管道。
在loop()函数中,创建一个TrafficStatus结构体对象,并填充交通状态信息。
使用radio.write()函数将交通状态信息发送给基础设施。
使用delay()函数控制发送频率。
案例2、基础设施接收交通状态信息:
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(9, 10);
struct TrafficStatus {
int vehicleId;
int speed;
int distance;
};
void setup() {
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(1, 0xF0F0F0F0E1LL);
radio.startListening();
}
void loop() {
if (radio.available()) {
TrafficStatus status;
radio.read(&status, sizeof(status));
Serial.print("Received Traffic Status - Vehicle ID: ");
Serial.print(status.vehicleId);
Serial.print(", Speed: ");
Serial.print(status.speed);
Serial.print(", Distance: ");
Serial.println(status.distance);
}
delay(1000);
}要点解读:
使用RF24库进行无线通信,通过nRF24L01模块与其他设备进行通信。
在setup()函数中,初始化无线电,并设置读取管道。
在loop()函数中,检查是否有可用的数据包。
如果有可用数据包,创建一个TrafficStatus结构体对象,并使用radio.read()函数读取交通状态信息。
使用串口(Serial)打印接收到的交通状态信息。
使用delay()函数控制接收频率。
案例3、基础设施向车辆发送指令:
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(9, 10);
struct Command {
int vehicleId;
int action;
};
void setup() {
radio.begin();
radio.openWritingPipe(0xF0F0F0F0D2LL);
}
void loop() {
Command command;
command.vehicleId = 1234;
command.action = 1;
radio.write(&command, sizeof(command));
delay(1000);
}要点解读:
使用RF24库进行无线通信,通过nRF24L01模块与其他设备进行通信。
在setup()函数中,初始化无线电,并设置写入管道。
在loop()函数中,创建一个Command结构体对象,并填充车辆指令信息。
使用radio.write()函数将车辆指令发送给基础设施。
使用delay()函数控制发送频率。
这些示例代码演示了Arduino智慧交通中车辆对基础设施(V2I)通信的实际运用程序。通过无线通信模块(nRF24L01)和RF24库,车辆可以发送交通状态信息给基础设施,基础设施也可以向车辆发送指令。
关键的要点如下:
1、车辆发送交通状态信息:
使用RF24库进行无线通信,设置写入管道。
创建一个结构体对象,并填充交通状态信息
2、基础设施接收交通状态信息:
使用RF24库进行无线通信,设置读取管道。
检查是否有可用的数据包。
创建一个结构体对象,并使用radio.read()函数读取交通状态信息。
使用串口(Serial)打印接收到的交通状态信息。
3、基础设施向车辆发送指令:
使用RF24库进行无线通信,设置写入管道。
创建一个结构体对象,并填充车辆指令信息。
使用radio.write()函数将车辆指令发送给基础设施。
这些示例代码可以作为实现Arduino智慧交通中车辆与基础设施之间通信的起点,并根据具体需求进行进一步开发和扩展。

当涉及到Arduino智慧交通的车对基础设施 (Vehicle-to-Infrastructure, V2I) 通信时,以下是几个实际运用的程序参考代码案例:
案例4、实时交通信息获取
#include <Ethernet.h>
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
IPAddress serverIP(192, 168, 0, 100);
int serverPort = 8080;
EthernetClient client;
void setup() {
Ethernet.begin(mac);
Serial.begin(9600);
if (client.connect(serverIP, serverPort)) {
Serial.println("Connected to server");
client.println("GET /traffic_info");
client.println("Host: 192.168.0.100");
client.println("Connection: close");
client.println();
}
}
void loop() {
if (client.available()) {
char c = client.read();
Serial.print(c);
}
if (!client.connected()) {
Serial.println();
Serial.println("Connection closed");
client.stop();
while (true);
}
}要点解读:
这个程序使用Arduino以太网连接到服务器,获取实时交通信息。
在setup()函数中,配置以太网连接,指定服务器的IP地址和端口号,并建立与服务器的连接。
在loop()函数中,检查与服务器之间的连接状态。如果有可用数据,将其读取并通过串口进行输出。
如果连接关闭,停止客户端并进入无限循环等待。
案例5、交通灯控制
#include <Ethernet.h>
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
IPAddress serverIP(192, 168, 0, 100);
int serverPort = 8080;
EthernetClient client;
void setup() {
Ethernet.begin(mac);
Serial.begin(9600);
}
void loop() {
if (client.connect(serverIP, serverPort)) {
Serial.println("Connected to server");
client.println("GET /traffic_light_status");
client.println("Host: 192.168.0.100");
client.println("Connection: close");
client.println();
delay(2000);
if (client.available()) {
String response = client.readStringUntil('\r');
Serial.println("Received response: " + response);
if (response == "RED") {
// 控制交通灯为红色
digitalWrite(13, HIGH);
} else if (response == "GREEN") {
// 控制交通灯为绿色
digitalWrite(13, LOW);
}
}
client.stop();
Serial.println("Connection closed");
delay(1000);
}
}要点解读:
这个程序使用Arduino以太网连接到服务器,获取交通灯状态并相应地控制交通灯。
在setup()函数中,配置以太网连接和串口通信。
在loop()函数中,建立与服务器的连接,并发送获取交通灯状态的请求。
延迟一段时间,等待服务器的响应。如果有可用数据,将其读取并根据响应的内容控制交通灯的状态。
关闭与服务器的连接,延迟一段时间后再次尝试连接。
案例6、道路拥堵检测
#include <Ethernet.h>
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
IPAddress serverIP(192, 168, 0, 100);
int serverPort = 8080;
EthernetClient client;
void setup() {
Ethernet.begin(mac);
Serial.begin(9600);
}
void loop() {
if (client.connect(serverIP, serverPort)) {
Serial.println("Connected to server");
client.println("GET /traffic_congestion");
client.println("Host: 192.168.0.100");
client.println("Connection: close");
client.println();
delay(2000);
if (client.available()) {
String response = client.readStringUntil('\r');
Serial.println("Received response: " + response);
int congestionLevel = response.toInt();
if (congestionLevel >= 5) {
// 道路拥堵,采取相应措施,如改变路径或提供交通建议
// ...
}
}
client.stop();
Serial.println("Connection closed");
delay(1000);
}
}要点解读:
这个程序使用Arduino以太网连接到服务器,获取道路拥堵程度并根据情况采取相应措施。
在setup()函数中,配置以太网连接和串口通信。
在loop()函数中,建立与服务器的连接,并发送获取道路拥堵程度的请求。
延迟一段时间,等待服务器的响应。如果有可用数据,将其读取并将其转换为整数类型,表示拥堵程度。
根据拥堵程度的值,可以采取相应的措施,如改变路径或提供交通建议。
关闭与服务器的连接,延迟一段时间后再次尝试连接。
这些参考代码案例演示了如何使用Arduino进行V2I通信的实际应用。通过以太网连接到服务器,可以获取实时交通信息、控制交通灯状态以及检测道路拥堵程度。这些代码可以根据具体的服务器接口和需求进行修改和扩展,以适应特定的智慧交通场景。
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。



 他的勋章
他的勋章

三春牛-创客2024.05.02
不错