 返回首页
返回首页
 回到顶部
回到顶部
【Arduino】189种传感器模块系列实验(资料代码+仿真编程+图形编程)
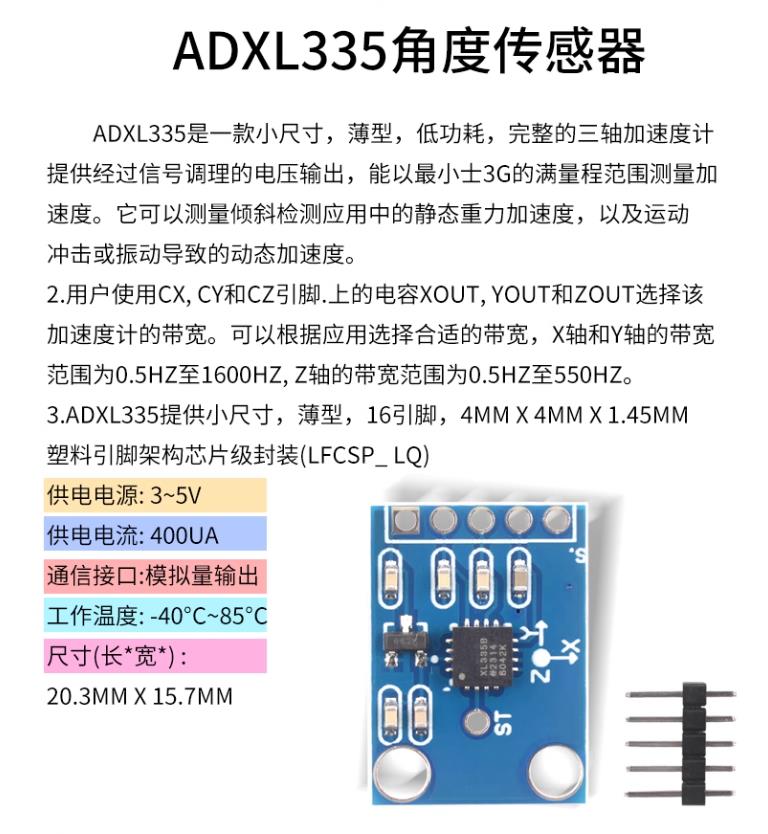
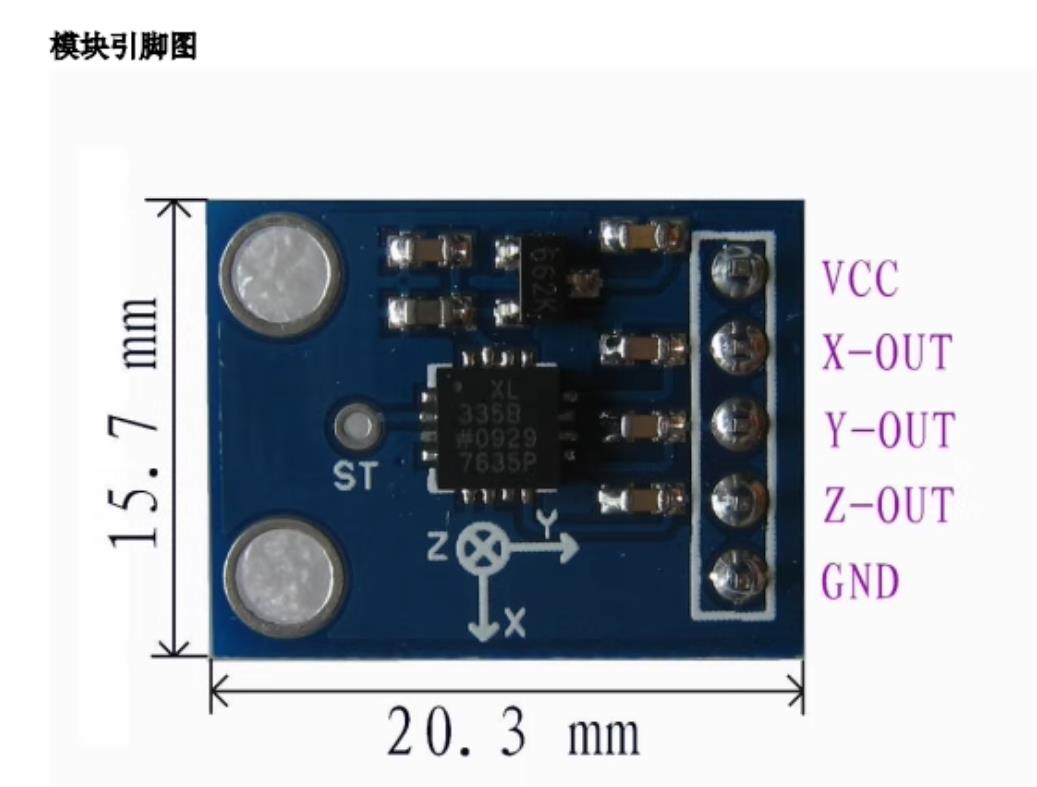
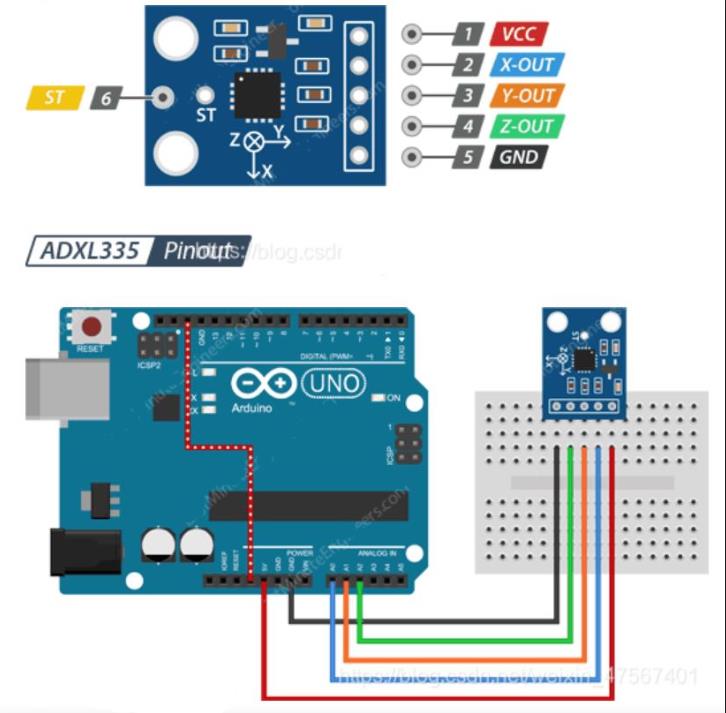
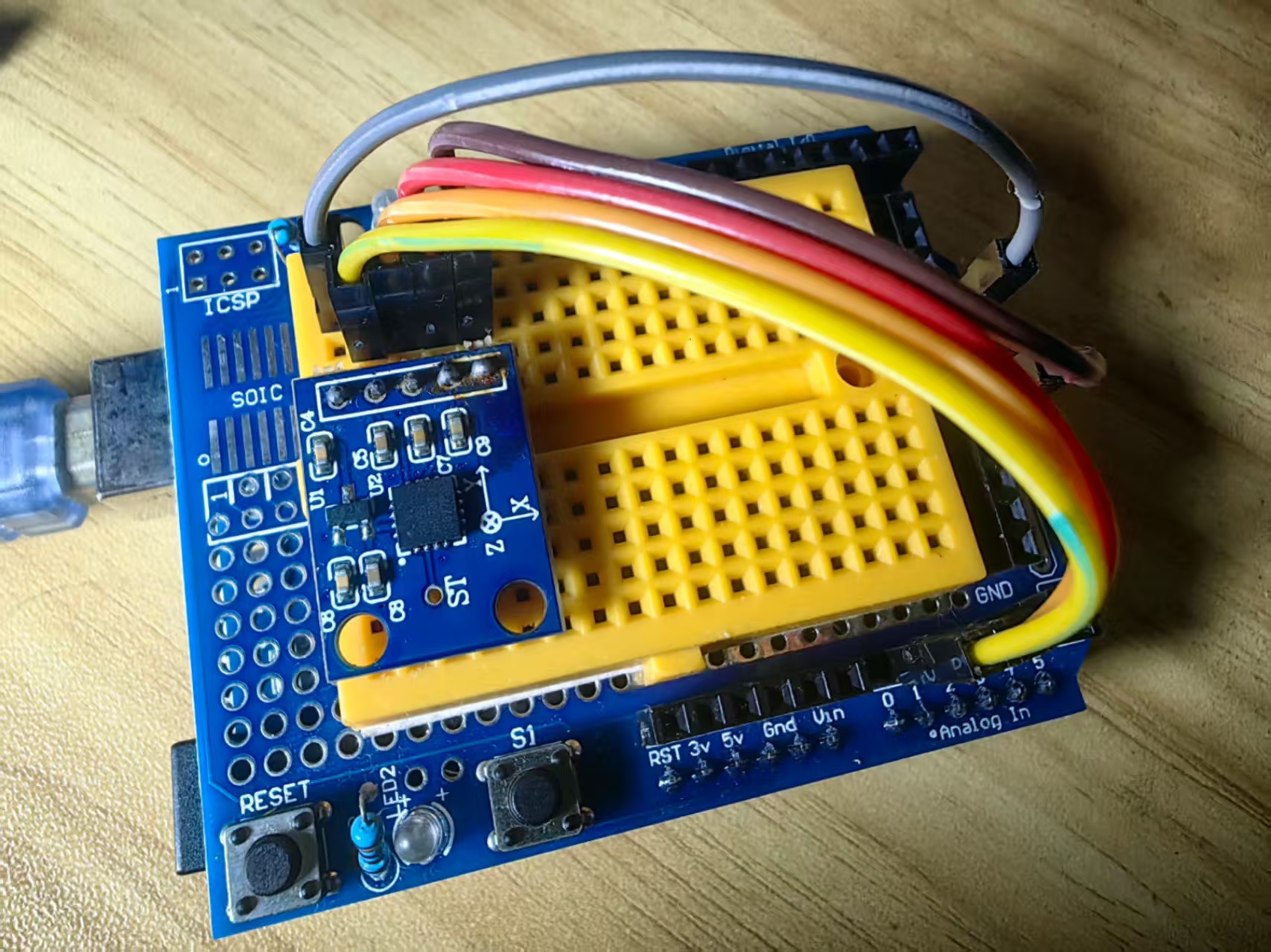
实验二百三十九:GY-61 ADXL335模拟量加速度模块 倾斜角度三轴加速度传感器
项目之四:使用按键的自动校准功能
静态校准:
与所有传感器一样,这些加速度计的样本之间的输出存在一些差异。对于非关键应用,例如游戏控制器或简单的运动或倾斜传感器,这些变化并不重要。但对于需要精确测量的应用,最好根据可靠的参考进行校准。
重力作为校准参考
加速度以重力或“G”为单位测量,其中 1G 代表地球表面的引力。尽管您可能听说过,但重力是一种非常稳定的力,如果您碰巧是居住在地表的地球人,它可以成为方便可靠的校准参考。
校准方法:
要将传感器校准到重力参考,您需要确定每个轴与引力轴精确对齐时的传感器输出。实验室质量校准使用精密定位夹具。这里描述的方法很简单,并且给出了非常好的结果。
运行校准程序
将代码加载到 Arduino 上并运行它。
打开 串行监视器。
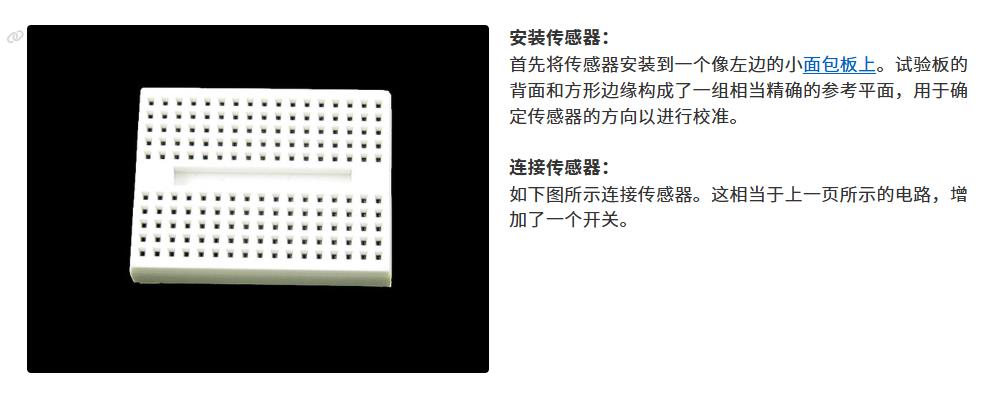
将带有传感器的试验板放在平坦的表面上
按住该按钮,直到您在串行监视器中看到“校准”。
这将校准 z 轴的最小值。
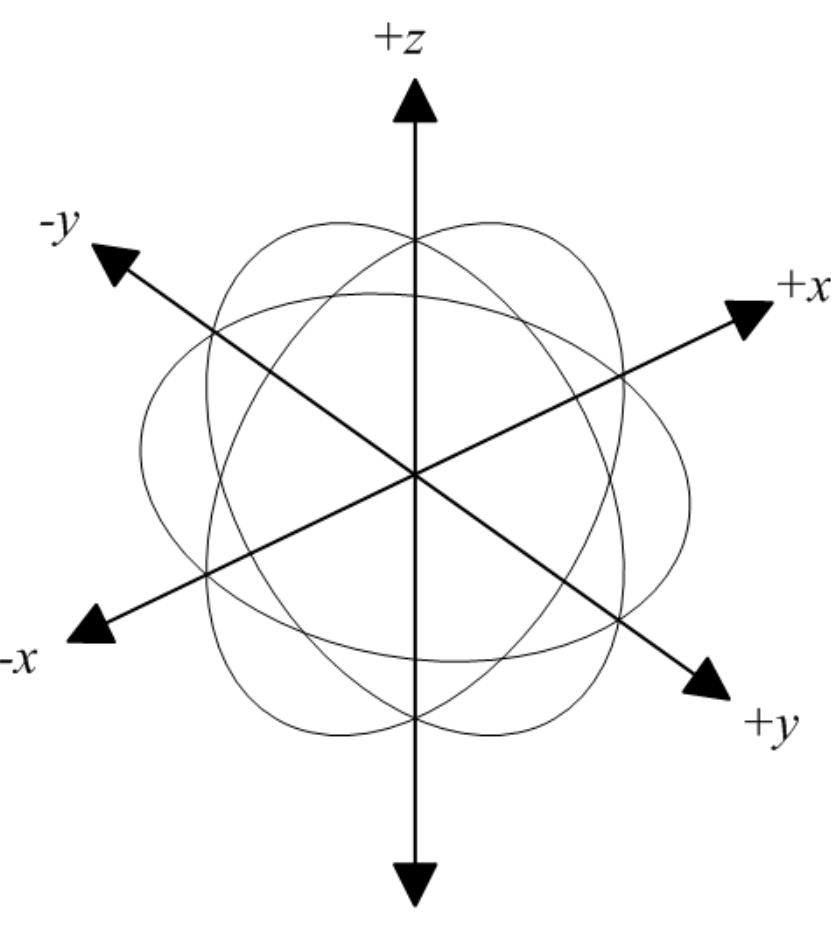
将试验板放在前边缘,然后再次按下按钮。校准 +Y
对其他三个边重复此作,以校准 +x、-y 和 -x。
将试验板倒置并再次按下按钮以校准 +z。(提示,桌子的底部可以很好地稳定它。
校准程序输出:
校准后,输出将显示每个轴的校准原始范围,然后是测得的“G”力。原始范围可用作草图中的常量。
原始范围: X: 408-616, Y: 398-610, Z: 422-625
511, 511, 625 : : -0.01G, 0.07G, 1.00G
原始范围: X: 408-616, Y: 398-610, Z: 422-625
511, 511, 625 :: -0.01G, 0.07G, 1.00G
原始范围: X: 408-616, Y: 398-610, Z: 422-625
511, 511, 625 :: -0.01G, 0.07G, 1.00G
原始范围: X: 408-616, Y: 398-610, Z: 422-625
511, 511, 625 :: -0.01G, 0.07G, 1.00G
原始范围: X: 408-616, Y: 398-610, Z: 422-625
【Arduino】189种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百三十九:GY-61 ADXL335模拟量加速度模块 倾斜角度三轴加速度传感器
项目之四:使用按键的自动校准功能
实验开源代码
/*
【Arduino】189种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百三十九:GY-61 ADXL335模拟量加速度模块 倾斜角度三轴加速度传感器
项目之四:使用按键的自动校准功能
*/
const int xInput = A0;
const int yInput = A1;
const int zInput = A2;
const int buttonPin = 2;
// Raw Ranges:
// initialize to mid-range and allow calibration to
// find the minimum and maximum for each axis
int xRawMin = 512;
int xRawMax = 512;
int yRawMin = 512;
int yRawMax = 512;
int zRawMin = 512;
int zRawMax = 512;
// Take multiple samples to reduce noise
const int sampleSize = 10;
void setup()
{
analogReference(EXTERNAL);
Serial.begin(9600);
}
void loop()
{
int xRaw = ReadAxis(xInput);
int yRaw = ReadAxis(yInput);
int zRaw = ReadAxis(zInput);
if (digitalRead(buttonPin) == LOW)
{
AutoCalibrate(xRaw, yRaw, zRaw);
}
else
{
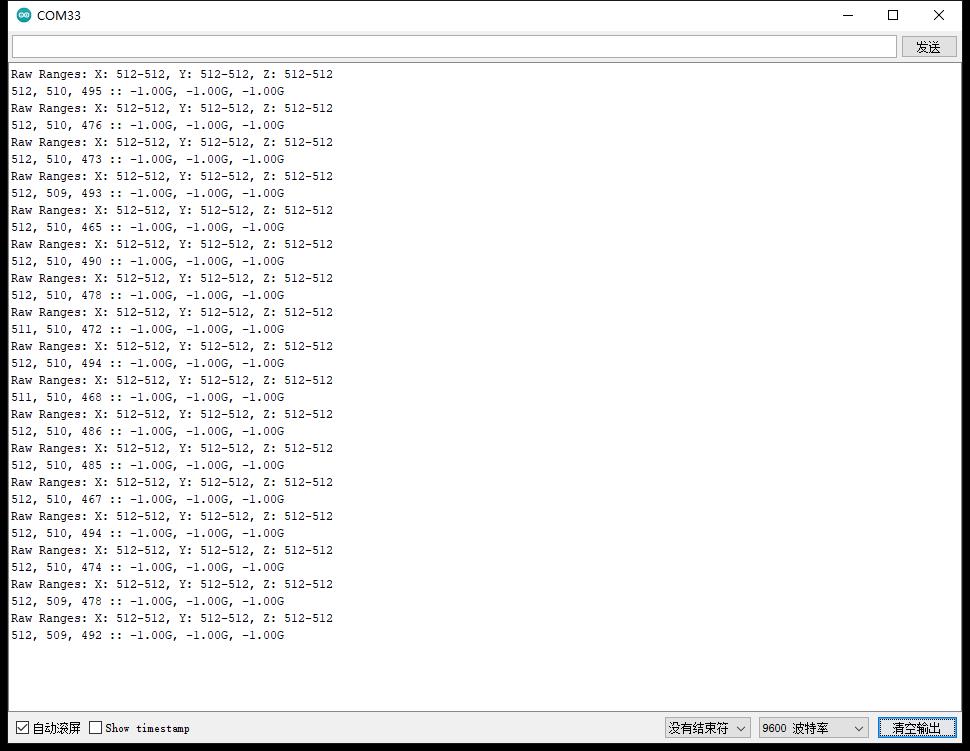
Serial.print("Raw Ranges: X: ");
Serial.print(xRawMin);
Serial.print("-");
Serial.print(xRawMax);
Serial.print(", Y: ");
Serial.print(yRawMin);
Serial.print("-");
Serial.print(yRawMax);
Serial.print(", Z: ");
Serial.print(zRawMin);
Serial.print("-");
Serial.print(zRawMax);
Serial.println();
Serial.print(xRaw);
Serial.print(", ");
Serial.print(yRaw);
Serial.print(", ");
Serial.print(zRaw);
// Convert raw values to 'milli-Gs"
long xScaled = map(xRaw, xRawMin, xRawMax, -1000, 1000);
long yScaled = map(yRaw, yRawMin, yRawMax, -1000, 1000);
long zScaled = map(zRaw, zRawMin, zRawMax, -1000, 1000);
// re-scale to fractional Gs
float xAccel = xScaled / 1000.0;
float yAccel = yScaled / 1000.0;
float zAccel = zScaled / 1000.0;
Serial.print(" :: ");
Serial.print(xAccel);
Serial.print("G, ");
Serial.print(yAccel);
Serial.print("G, ");
Serial.print(zAccel);
Serial.println("G");
delay(500);
}
}
//
// Read "sampleSize" samples and report the average
//
int ReadAxis(int axisPin)
{
long reading = 0;
analogRead(axisPin);
delay(1);
for (int i = 0; i < sampleSize; i++)
{
reading += analogRead(axisPin);
}
return reading / sampleSize;
}
//
// Find the extreme raw readings from each axis
//
void AutoCalibrate(int xRaw, int yRaw, int zRaw)
{
Serial.println("Calibrate");
if (xRaw < xRawMin)
{
xRawMin = xRaw;
}
if (xRaw > xRawMax)
{
xRawMax = xRaw;
}
if (yRaw < yRawMin)
{
yRawMin = yRaw;
}
if (yRaw > yRawMax)
{
yRawMax = yRaw;
}
if (zRaw < zRawMin)
{
zRawMin = zRaw;
}
if (zRaw > zRawMax)
{
zRawMax = zRaw;
}
}代码解读
这段代码使用 加速度传感器 采集 X、Y、Z 轴数据,并提供 自动校准功能,核心逻辑如下:
1. 初始化传感器
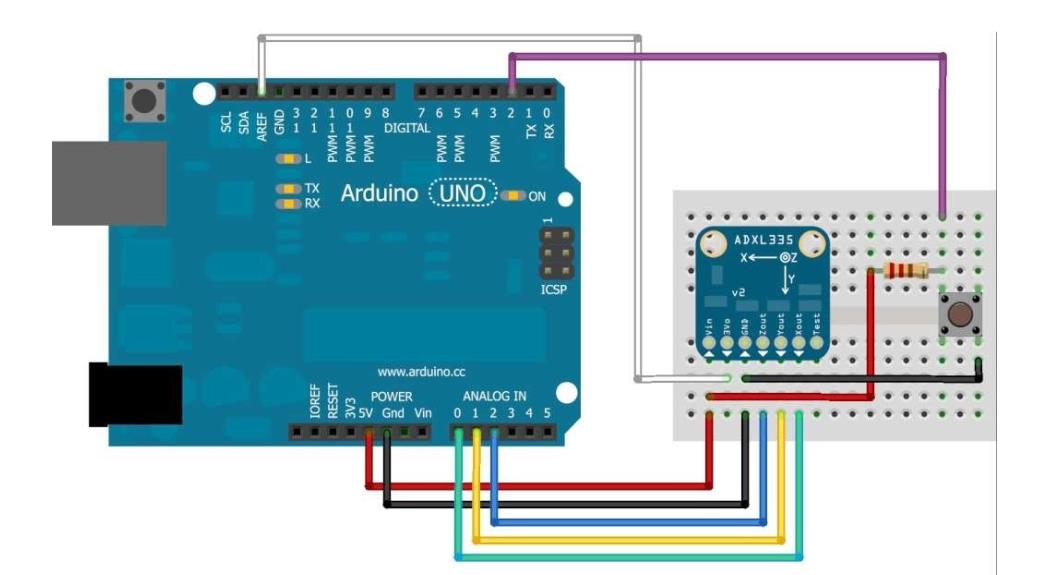
✅ const int xInput = A0; → X 轴连接 A0
✅ const int yInput = A1; → Y 轴连接 A1
✅ const int zInput = A2; → Z 轴连接 A2
✅ const int buttonPin = 2; → 按钮用于触发自动校准
✅ analogReference(EXTERNAL); → 使用外部参考电压,提高精度
2. 读取加速度数据
✅ ReadAxis(xInput); → 采集 X 轴的电压数据
✅ ReadAxis(yInput); → 采集 Y 轴的电压数据
✅ ReadAxis(zInput); → 采集 Z 轴的电压数据
✅ 多次采样(10 次)求平均值,减少噪声
3. 自动校准
✅ 按下按钮时调用 AutoCalibrate(),动态调整 最小/最大值
✅ 不断更新 xRawMin、xRawMax 等范围,提高测量精度
4. 数据转换
✅ map(xRaw, xRawMin, xRawMax, -1000, 1000); → 将 ADC 值转换为 milli-G(±1G)
✅ / 1000.0 → 转换为 G(加速度单位)
5. 串口输出
✅ Serial.print("Raw Ranges: X: "); Serial.print(xRawMin); → 打印 X 轴的最小/最大值
✅ 以 G 为单位显示加速度数据,格式化输出
6. 采集间隔
✅ delay(500); → 每 500 毫秒更新一次数据,适合实时监测
这段代码让 加速度传感器能够动态校准并稳定采集数据
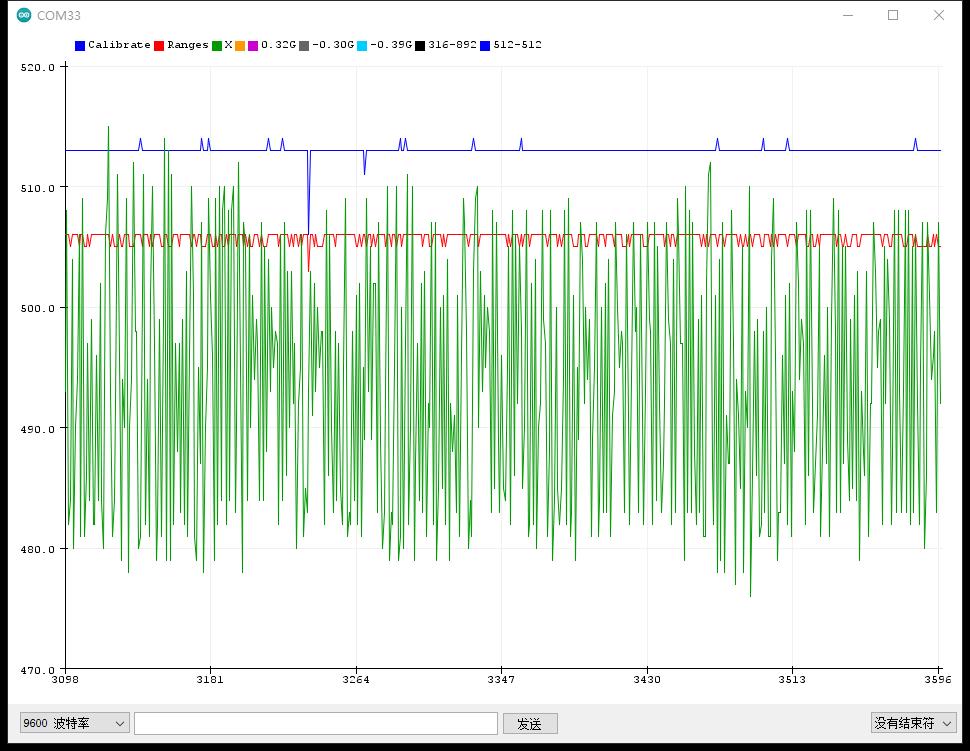
实验串口返回情况
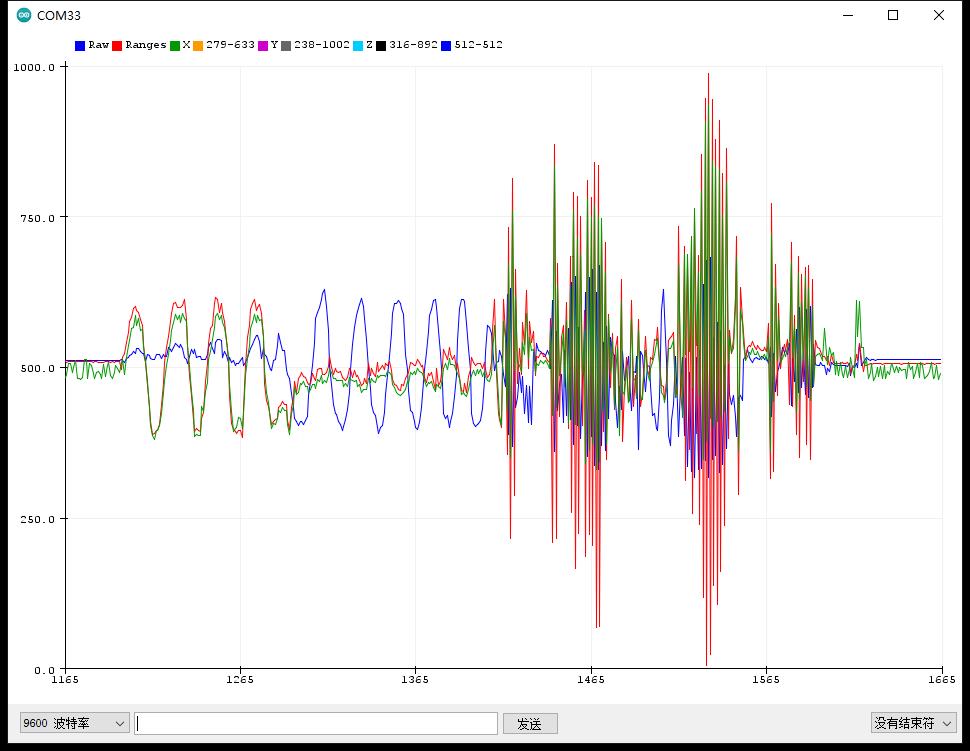
实验串口绘图器返回情况


 他的勋章
他的勋章

评论