 返回首页
返回首页
 回到顶部
回到顶部
2.11 晴 周二
学校开完会。回来继续。解决问题,升级改造绕线器。
在上次改造之后,摆杆的速度是降下来了,可是发现了控制不精确的问题,同时电机的开启和结束不好控制,所以这次的升级改造重点在这些地方。
可是乐动掌控的接口有点小特殊,我也没有转换线,所以只有放弃,改主控。
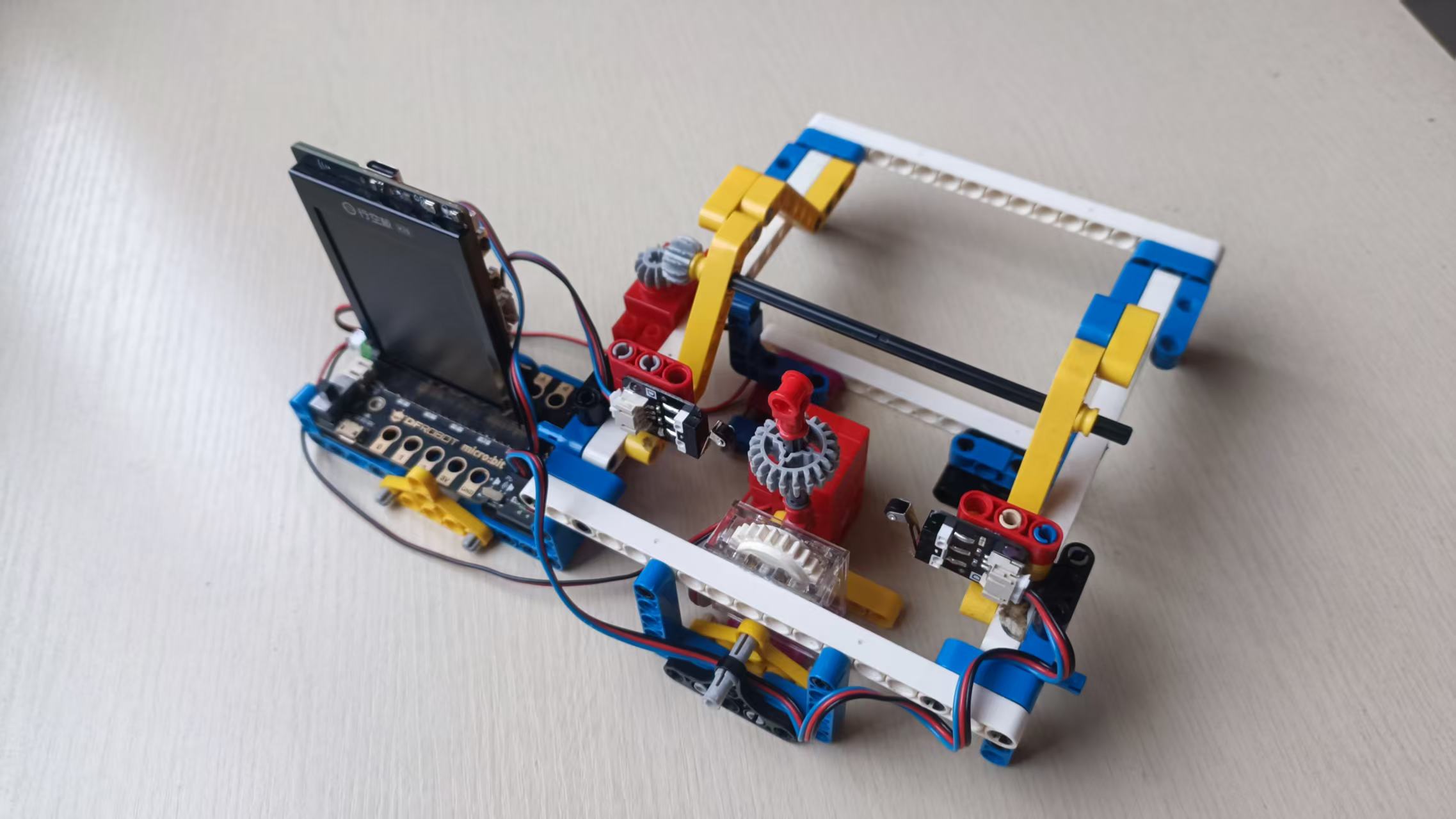
这次用上了K10,语音控制启动与停止,加上两个轻触开关,控制摆杆的运动方向,好酸爽。
只有一个缺点,不够美观,不过这不重要了。
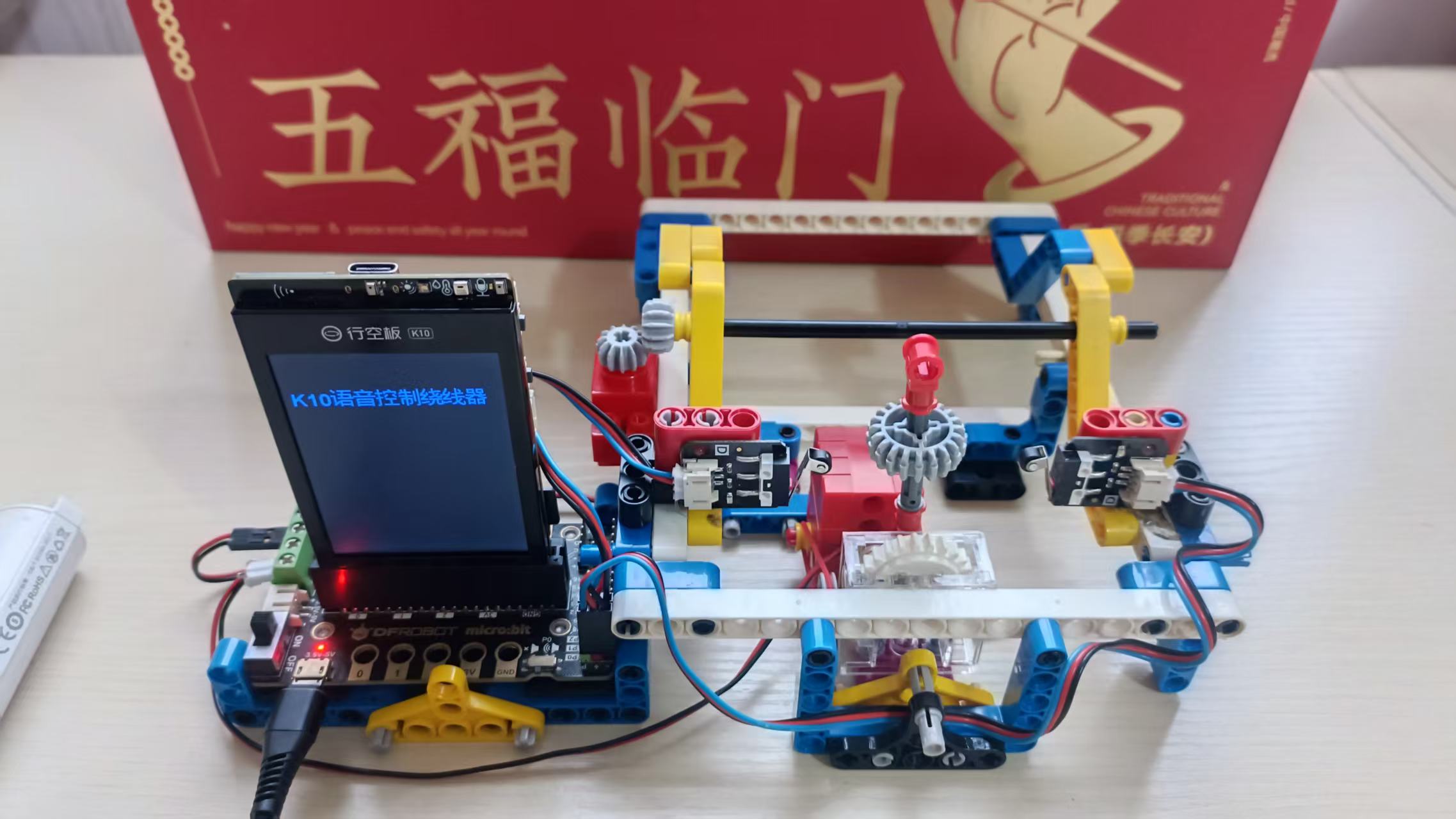
是为绕线器3.0也。
材料清单
- K10 X1
- 扩展板 X1
- 乐高电机 X2
- 轻触开关 X2
- 电池 X1
- 乐高积木 X若干
主控K10+扩展板+轻触开关分别接P0、P1,电机分别接M1、M2。
先用串口读一下轻触开关的读数,按下为0。
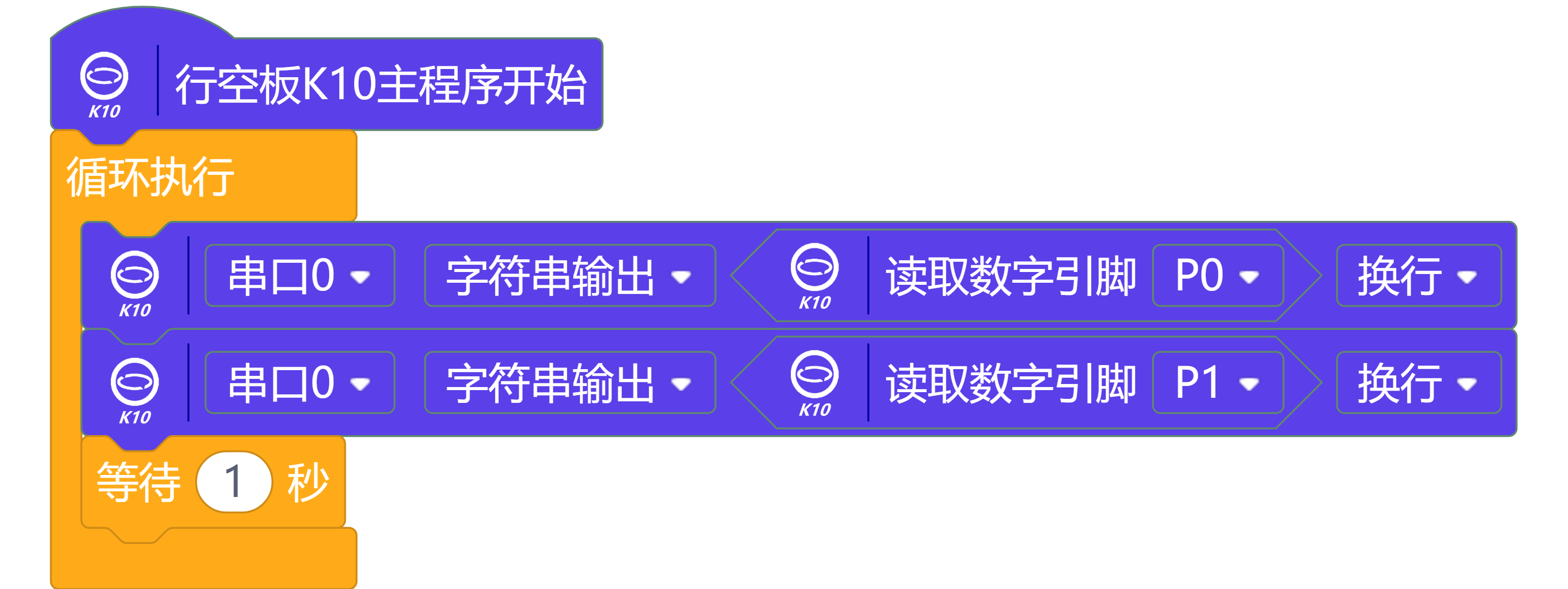
再写简单程序如下:

小结:
绕线器到这里就完结了,经过不断优化,基本达到了预定的目标,实现无人值守绕线团。
附件
后续:
用上面的程序绕了一个线团,又发现了一个不满意的地方,因为摆杆的运动轨迹是圆弧(同时产生力量压动轻触开关也需要时间),所以绕出的线团呈两头大的哑铃状,所以又优化程序,实现了比较均匀的圆柱状。
下面程序中用系统运行时间,测试了摆杆一个往返大约30秒,然后用三角函数来处理数据,让绕线电机的速度和正弦函数关联,中间转速快,两边转速小。而摆杆电机的速度和余弦函数关联,两边速度快,中间速度小。同时用到了多线程。

再小结:
1、这个作业并没有太多价值,只是记录学习的过程,体会到机械的魅力和不断探索的乐趣。
2、如果再改进,主要是结构上的优化,用齿条代替摆臂,让导线孔在一条水平线上左右运动。
附件
2.17
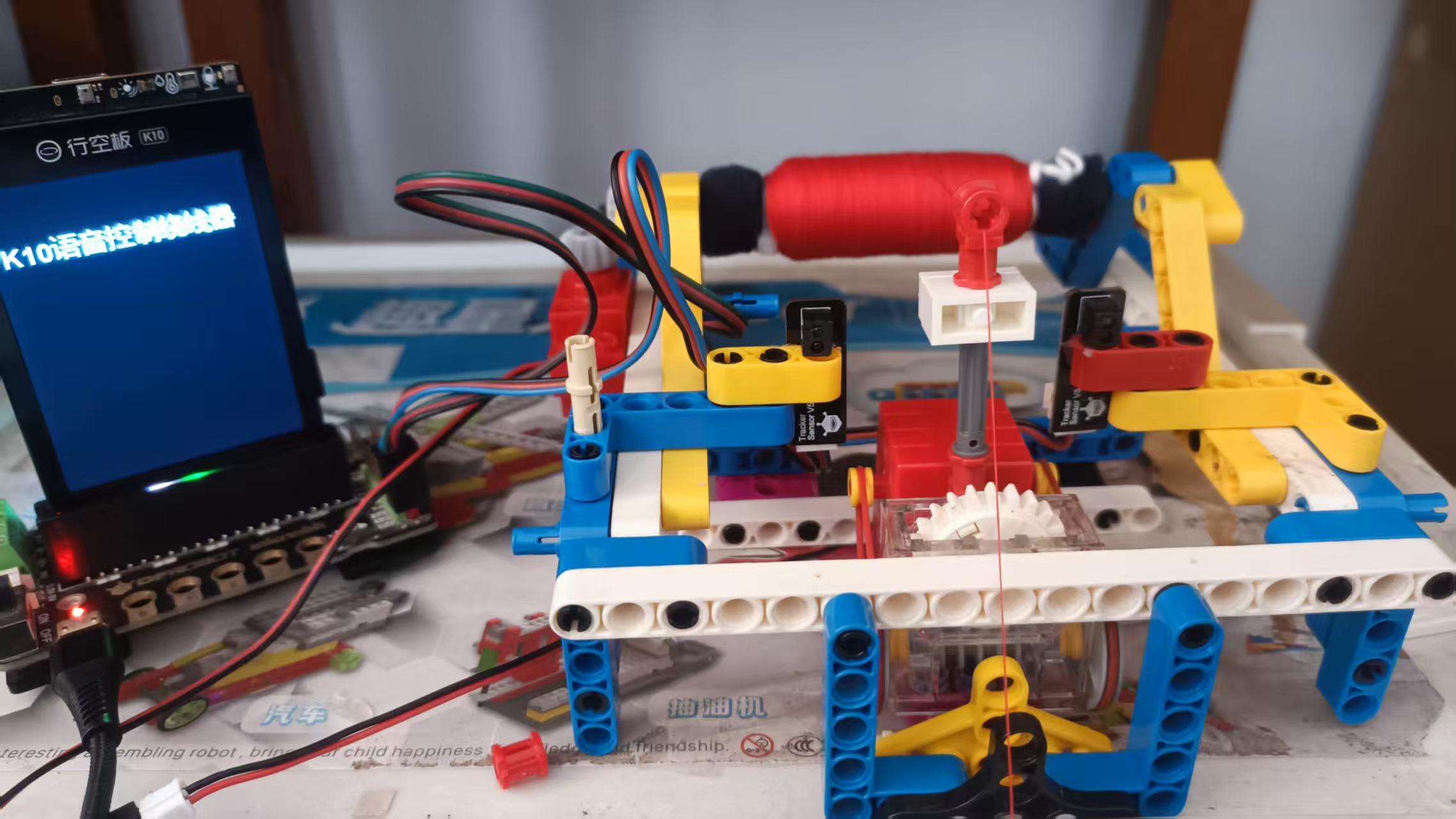
绕线器进行了一点优化,把两个轻触传感器换成了两个寻线传感器,这种传感器不用压力,不用接触,所以反应很灵敏,减少摆杆在两端的停留时间。
程序是在上面程序上修改了一点。


 他的勋章
他的勋章

评论