 返回首页
返回首页
 回到顶部
回到顶部

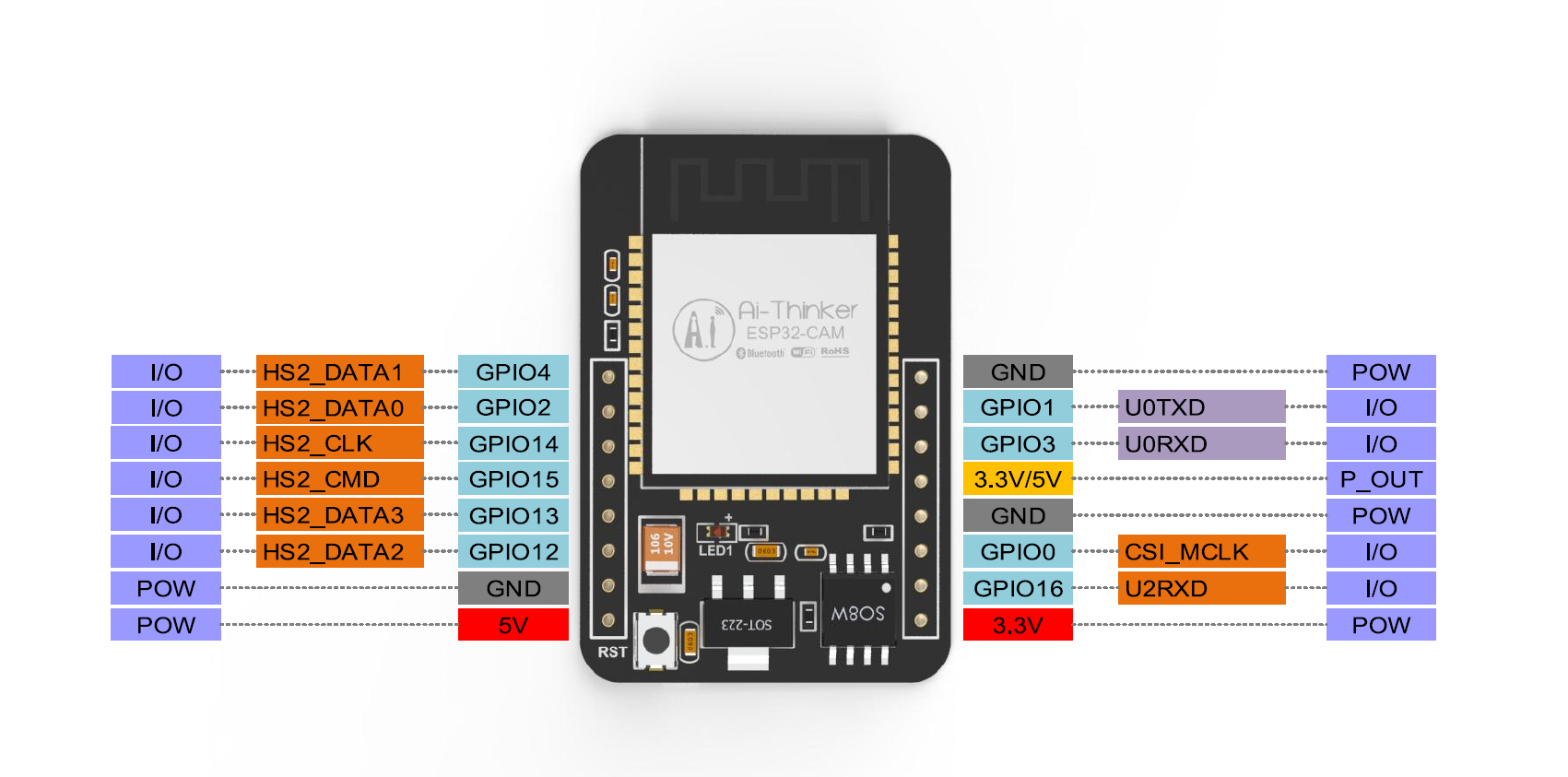
ESP32-CAM 是一款非常小的摄像头模块,配备 ESP32-S 芯片。除了 OV2640 摄像头和几个用于连接外围设备的 GPIO 外,它还具有一个 microSD 卡插槽,可用于存储使用摄像头拍摄的图像或存储文件以提供给客户。包括乐鑫 ESP32-S Wifi + 蓝牙+BLE 芯片、2MP 摄像头模块 OV2640 和带有 CH340 UART 芯片的 USB 编程适配器。
ESP32-Cam 是一款运行在 ESP32-S 芯片上并使用 OV2640 摄像头的小型摄像头模块。ESP32_Cam 也可以 OV7670 摄像头,但 OV2640 更好(更高的分辨率和内置的 JPEG 编码,这消除了 ESP32-S 的处理任务)。
ESP-32 Cam 规格
ESP-32 系列
它支持 Wi-Fi (802.11b/g/n)
支持蓝牙 (4.2 带 BLE)
内置 LED 闪光灯
9 个 IO 端口
支持 UART、SPI、I2C 和 PWM
内置 micro SD 读卡器
输入电源:3.3V / 5V(据报道,5V 供电比 3.3V 更稳定)
OV2640 摄像头
2 百万像素
阵列尺寸:UXGA (1600 x 1200)
镜头尺寸:1/4 英寸(6.35 毫米)
最大图像传输速率:15 帧/秒
偶然找到一片双排引脚的扩展板,适合外接引脚,做做各种小实验
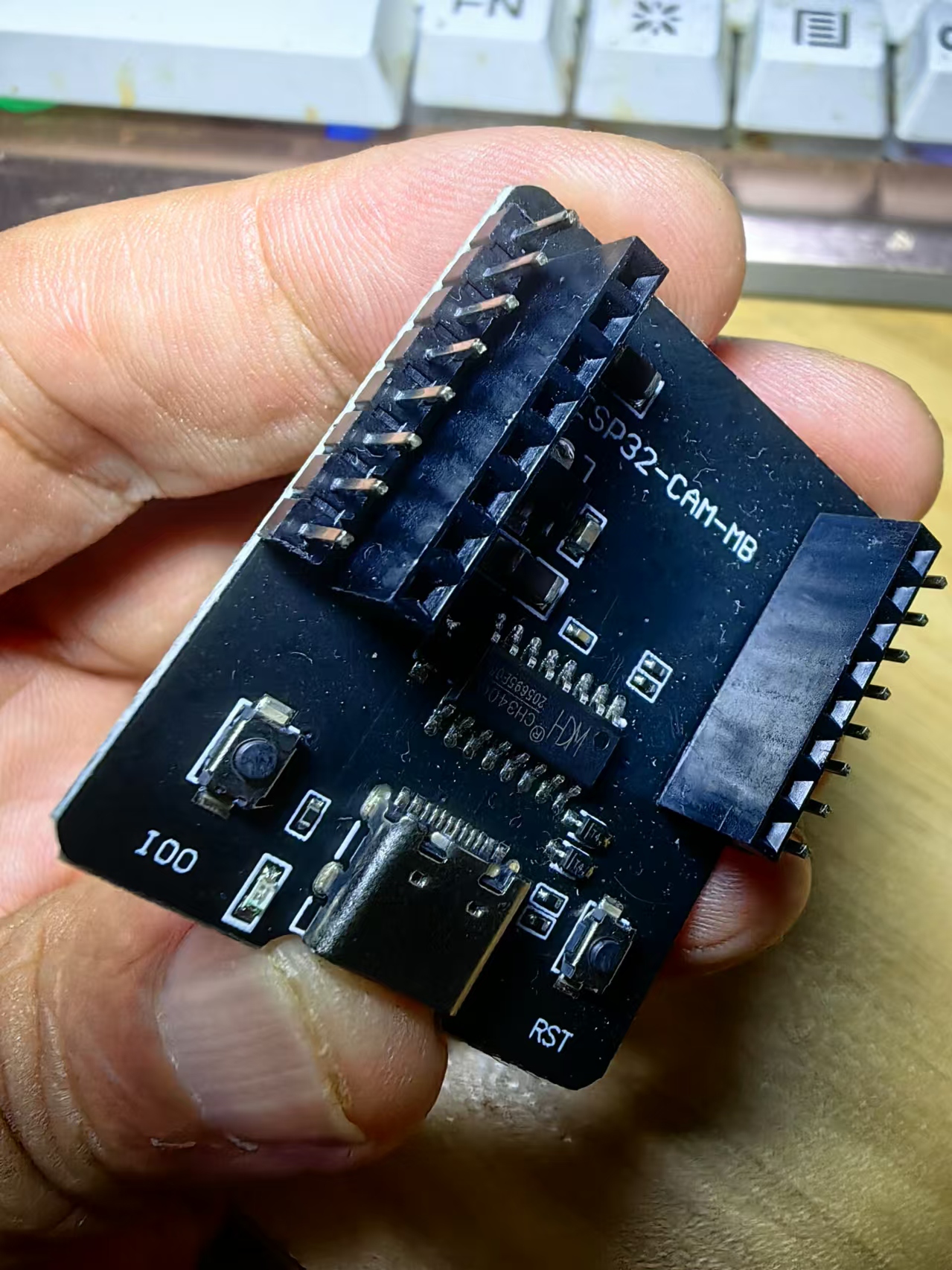
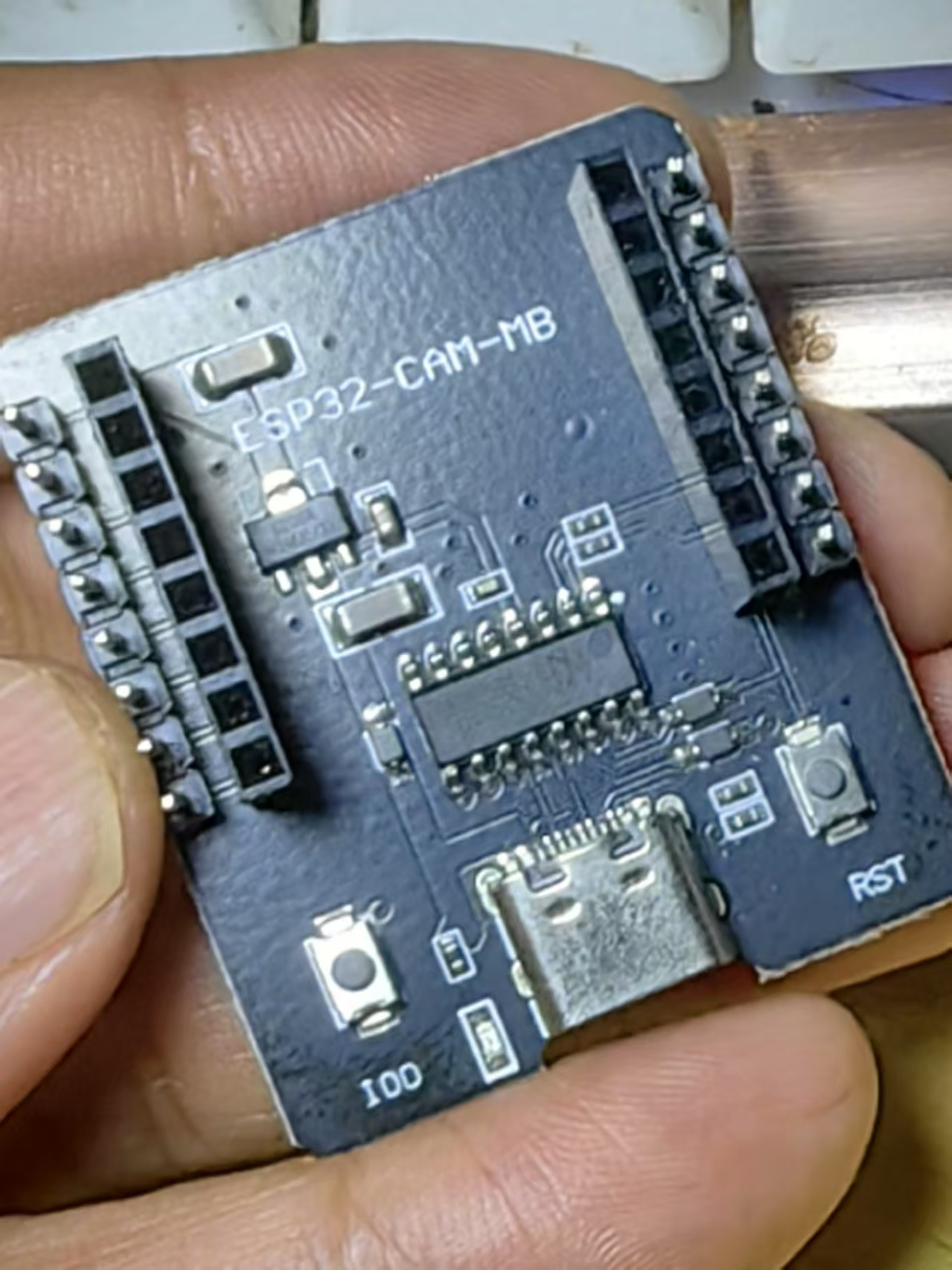
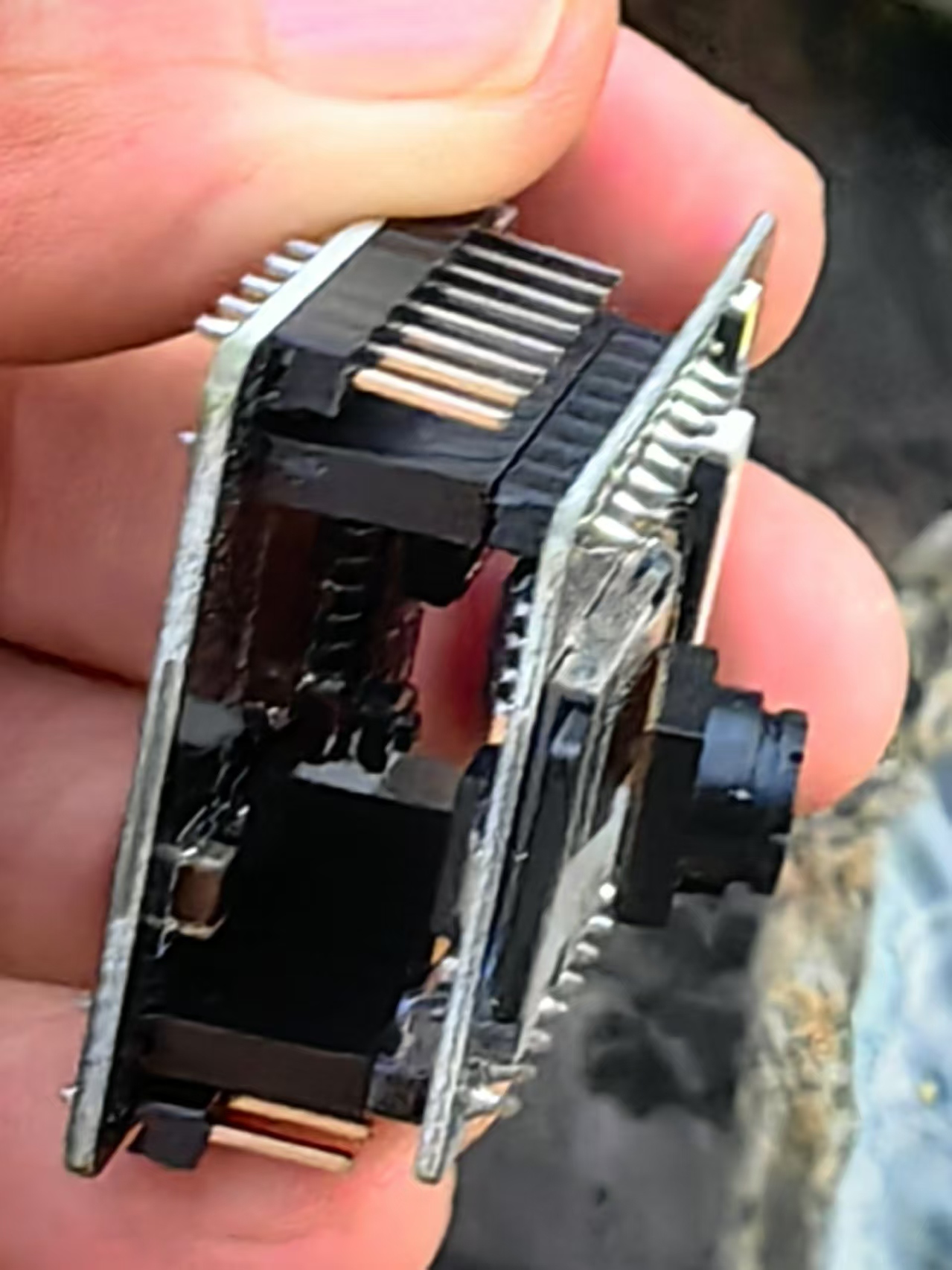
组合起来是这样

MG90S舵机是一种常用的微型舵机,广泛应用于模型飞机、船只、无人机等领域。
技术参数:
最大转力:1.2kg/cm
最大转速:0.1秒/360°
最大转角:±90°
电源电压:4.8V-6V
电流消耗:0.5A
重量:约40g
尺寸:40mm x 20mm x 20mm
用途:
模型飞机:用于控制飞机的方向和姿态。
无人机:用于调整和控制无人机的飞行方向。
船只模型:用于控制船只的航行方向。
机器人:用于机械臂和其他机器人的运动控制。
MG90S舵机由于其小巧、轻便、功耗低的特点,非常适合用于各种微型机器人和模型制作项目。

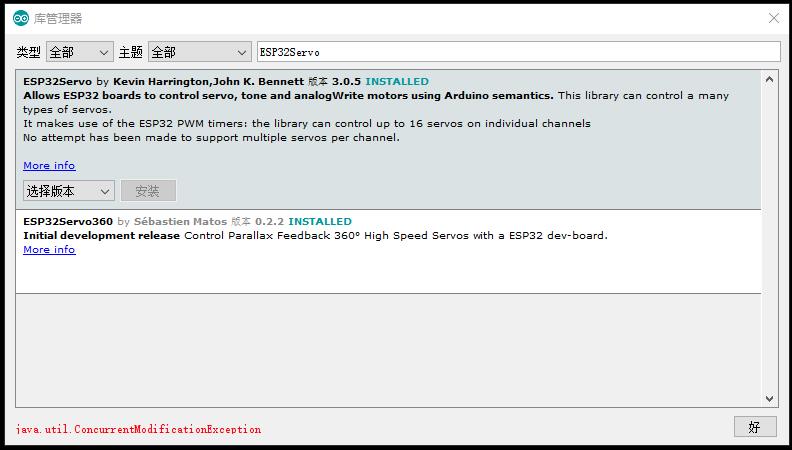
安装ESP32Servo库:
1、打开Arduino IDE。
2、依次选择工具 > 库管理器。
3、在库管理器中搜索“ESP32Servo”。
4、找到后点击“安装”。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百三十:ESP32 CAM开发板 带OV2640摄像头模块 WIFI+蓝牙模块
项目实验之二十五:使用ESP32-CAM驱动MG90S舵机
实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验二百三十:ESP32 CAM开发板 带OV2640摄像头模块 WIFI+蓝牙模块
项目实验之二十五:使用ESP32-CAM驱动MG90S舵机
*/
#include <ESP32Servo.h>
Servo myservo; // 创建舵机对象
void setup() {
Serial.begin(115200);
myservo.attach(16); // 将舵机连接到引脚16
// 初始化舵机位置
myservo.write(90); // 将舵机移动到90度,作为中间位置
delay(1000); // 延时1秒以稳定
}
void loop() {
myservo.write(0); // 将舵机移动到0度
delay(1000); // 延时1秒
myservo.write(90); // 将舵机移动到90度
delay(1000); // 延时1秒
myservo.write(180); // 将舵机移动到180度
delay(1000); // 延时1秒
}实验场景图 动态图


 他的勋章
他的勋章

评论