 返回首页
返回首页
 回到顶部
回到顶部
引言
每年春节的时候,作为湖北地区的传统风俗,舞龙灯走村串巷,锣鼓喧天、焰火闪耀,好不热闹。
今年是龍年,龍年春节,龙灯贺喜,所以我使用ESP32制作一个智能舞龙灯,祝大家龍年大吉大利!
项目介绍
今年是龍年,龍年春节,来一条能够自动摇头摆尾舞动的龙灯,一定是最合适的。
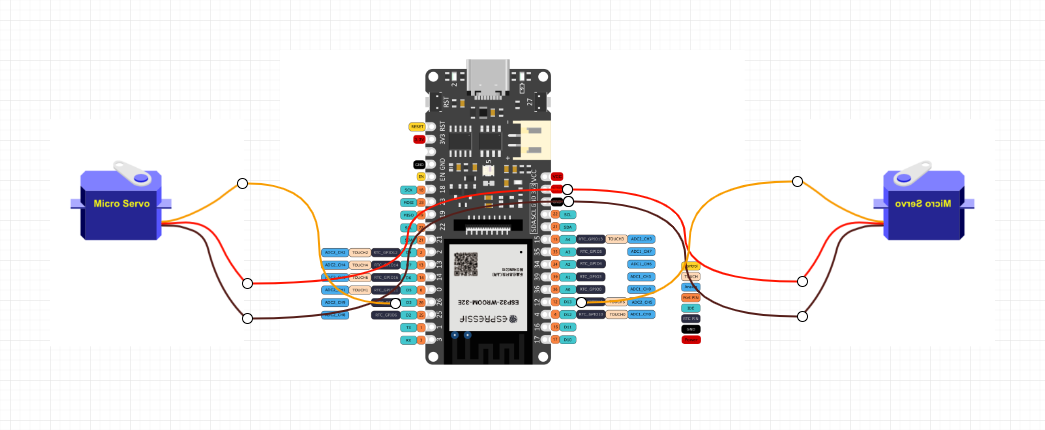
这个项目就是使用ESP32来控制2个舵机,实现龙灯的自动摇头和摆尾,为春节增添一份祥和喜乐的气氛。
制作材料
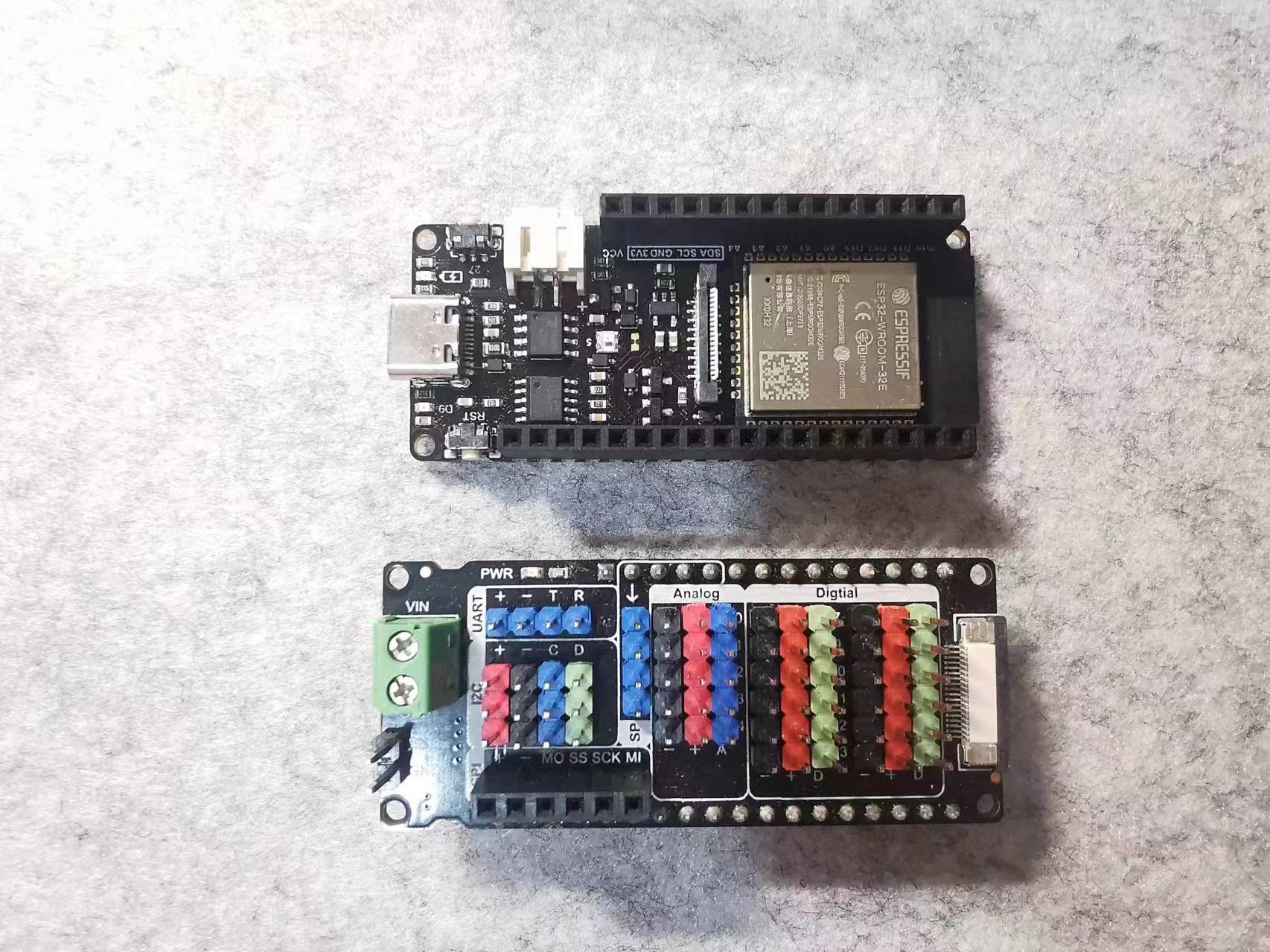
要完成这个智能龙灯,需要的材料如下:



制作过程
步骤1 在舵机上安装筷子
将两根筷子的一头,适当的位置用美工刀切割凹槽(与螺丝吻合),以便安装在舵机的支架上:

实际安装后如下:

步骤2 测试舵机控制
筷子安装完毕后,首先进行舵机角度控制,测试180度控制,以及指定角度的控制。
步骤3 底座制作和测试
首先,使用桐木板制作一个底座:

然后将舵机安装到底座上:

然后进行测试:
步骤4 安装底座和舵机到龙灯内部
将底座,安装到龙灯支柱上:
并使用胶枪进行固定:

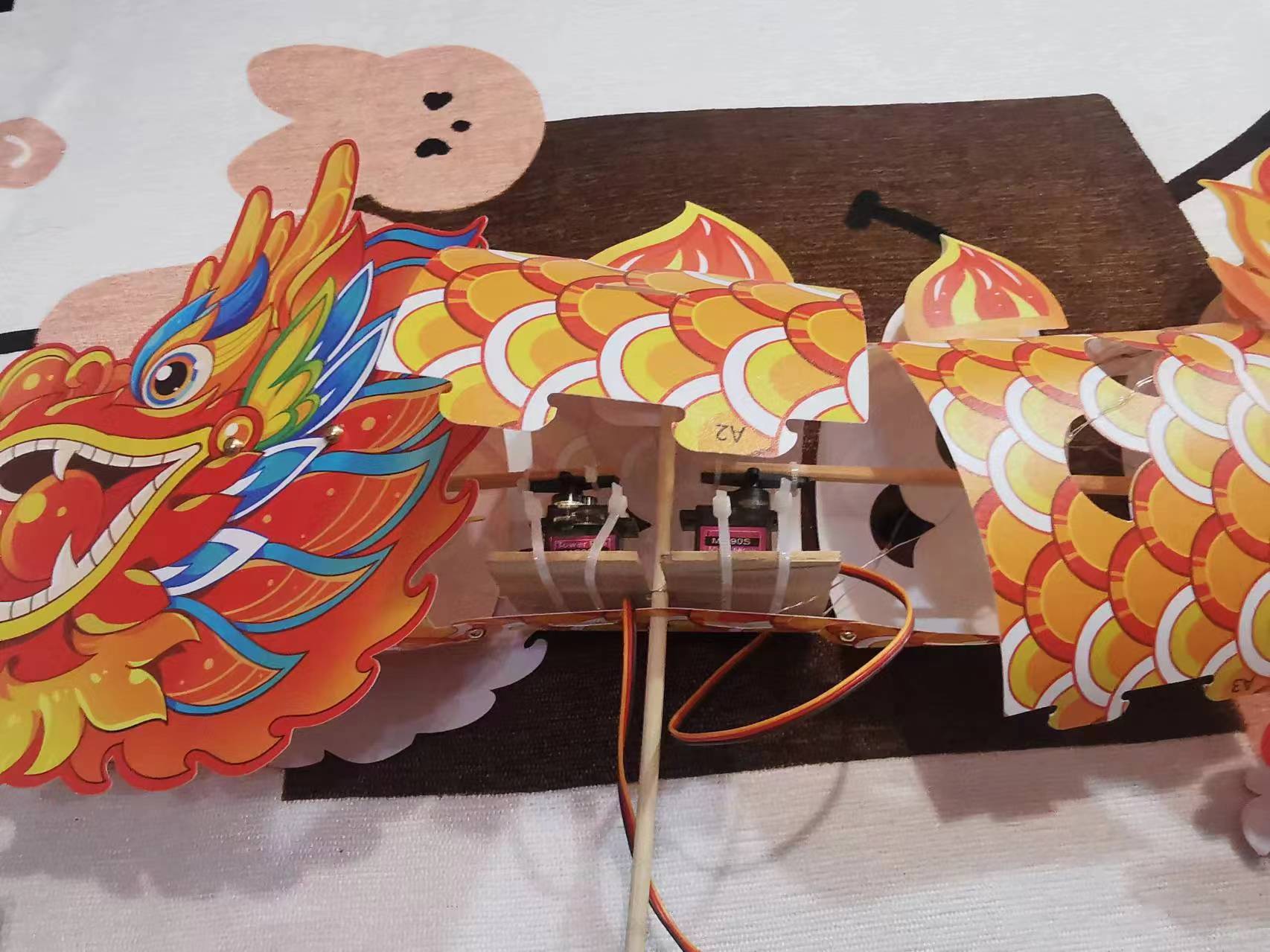
最终安装后的成品如下:

我将其放置到了一个手机架上,以便进行调试。
步骤5 功能调试和测试
安装完成后,先控制舵机小角度运行,以免撑坏了龙灯。
然后再逐步进行调整,使得头部和尾部,均能转到合适的位置即可。
作品演示
安装调试完成后,就可以实际使用了,最终的演示效果如下:
总结
1. 在实际开发的过程中,也遇到过一些问题,并一一解决:
1). 舵机同时控制的问题:
在ESP32上,两个舵机,不能同时控制,只能一个先控制,延时一段时间之后,再控制第二个,否则可能造成第二个的控制混乱。
我有一个MG90S是360度的,想要同时控制,结果导致其不停转圈。最后分开控制,就有问题了。
2. 后续优化考虑:
1). 效果更好的由头摆尾:
头部和尾部,使用T字杆进行控制,这样子就不会有空转的时候,效果会更好
2). 声音:
后续可以加入龙吟声音播放,效果更好。
3. 总结:
1). FireBeetle 2 ESP32-E结合扩展板,能够非常好的进行原型的制作,非常方便连接舵机进行控制。
2). 舵机调试需要不断修改参数进行测试,micropython非常方便进行快速开发和调试
最后,特别感谢提供这次“我为家乡打Call”,让创客活动融入到实际生活中来,既有趣又有意义!!!
import machine
from machine import Pin, PWM
import time
D6 = machine.Pin(14)
D13 = machine.Pin(12)
'''
0.5ms 0° 1638
1ms 45° 3276
1.5ms 90° 4915
2ms 135 ° 6553
2.5ms 180° 8192
'''
h0 = 50 # 频率
t0 = 0.10 # 最小时间单位
n0 = 1/h0 * 1000 # 1秒计数次数
d0 = pow(2, 16) / (n0 / t0) # 最小周期单位
i0 = 0.5 / t0 # 0度时间单位数
i1 = 2.5 / t0 # 180度时间单位数
s1 = PWM(D6)
s2 = PWM(D13)
s1.freq(h0) # 50Hz,20ms
s2.freq(h0) # 50Hz,20ms
s1.duty_u16(int(d0 * 1.5/t0))
time.sleep(0.5)
s2.duty_u16(int(d0 * 1.5/t0))
time.sleep(0.5)
# 头部参数
i10 = 1.05 / t0
i11 = 2.15 / t0
# 尾部参数
i20 = 1.25 / t0
i21 = 2.15 / t0
while True:
if True:
print("向左")
for i in range(i10,i11+1):
print(" L:", i)
s1.duty_u16(int(d0*i)) # i * 45度
time.sleep(0.4)
print("向右")
for i in range(i11,i10-1,-1):
print(" R:", i)
s1.duty_u16(int(d0*i)) # i * 45度
time.sleep(0.4)
if True:
print("向左")
for i in range(i20,i21+1):
print(" L:", i)
s2.duty_u16(int(d0*i)) # i * 45度
time.sleep(0.4)
print("向右")
for i in range(i21,i20-1,-1):
print(" R:", i)
s2.duty_u16(int(d0*i)) # i * 45度
time.sleep(0.4)
s1.deinit() # turn off PWM on the pin
s2.deinit() # turn off PWM on the pin
线路连接图


 他的勋章
他的勋章

罗罗罗2024.04.06
666
伦**2024.03.17
666